1.本实用新型涉及飞机检测跟踪识别系统技术领域,具体是指一种基于边缘计算的飞机检测跟踪识别系统。
背景技术:
2.在众多的检测目标中,飞机不仅是再民用领域的重要载体,在军用领域中更是关键的打击力量。并且由于人工拍摄的实时性和稳定性的局限,在侦察机型上布置飞机检测跟踪智能小系统用于对领空中陌生飞机的自动检测就显得更具有重要意义。
3.深度学习中的卷积神经网络依靠神经网络中数以千万计的网络参数共同参与计算,存在网络结构复杂,运算量大,速度慢的缺点,并且很难移植到嵌入式设备中。随着网络模型层数越来越深,参数越来越多,减少他们的大小和计算损耗至关重要。
4.近年来主流的目标检测,大多数是使用深层卷积神经网络和各种大规模数据集进行训练与检测。常见的检测架构分为以yolo、ssd、cornernet和r-cnn、fastr-cnn、fasterr-cnn等为代表的一阶段或多阶段模型。而性能越好的神经网络往往意味着更深,更宽的网络结构,更多的网络参数以及更为庞大的存储和计算开销,往往无法将其顺利的部署到移动端和嵌入式设备中。因此对神经网络的压缩和加速,以及将这些轻量化后的目标检测跟踪神经网络的良好性能布置到相关的智能小系统当中具有重大的学术和工程价值。
技术实现要素:
5.本实用新型要解决的技术问题是克服上述技术的缺陷,提供一种基于边缘计算的飞机检测跟踪识别系统。
6.为解决上述技术问题,本实用新型提供的技术方案为一种基于边缘计算的飞机检测跟踪识别系统:包括双自由度摄像头,所述双自由度摄像头下部设有云台,所述云台设有舵机,所述舵机控制云台上的双自由度摄像头转动,还包括计算机,所述双自由度摄像头通过网络连接模块与所述计算机连接,所述计算机设有显示器以及报警模块。
7.作为改进,所述舵机采用串口通信方式控制云台。
8.作为改进,所述显示器实时显示双自由度摄像头所采集的图像,所述计算机实时处理双自由度摄像头所采集的图像。
9.作为改进,所述报警模块在目标飞机无法被检测、跟踪或识别时进行报警。
10.本实用新型与现有技术相比的优点在于:舵机控制双自由度摄像头转动对目标飞机检测,检测图像通过网络连接模块传回计算机处理并显示在显示器上,报警模块起到异常报警作用。减少人工收集数据与处理数据的人力与时间成本,有利于获取更全面,更高质量的数据,边缘计算平台所占空间较小,便携性强,可移植性强,飞机型号类型识别精度更高,具有很高的实用价值和推广价值。
附图说明
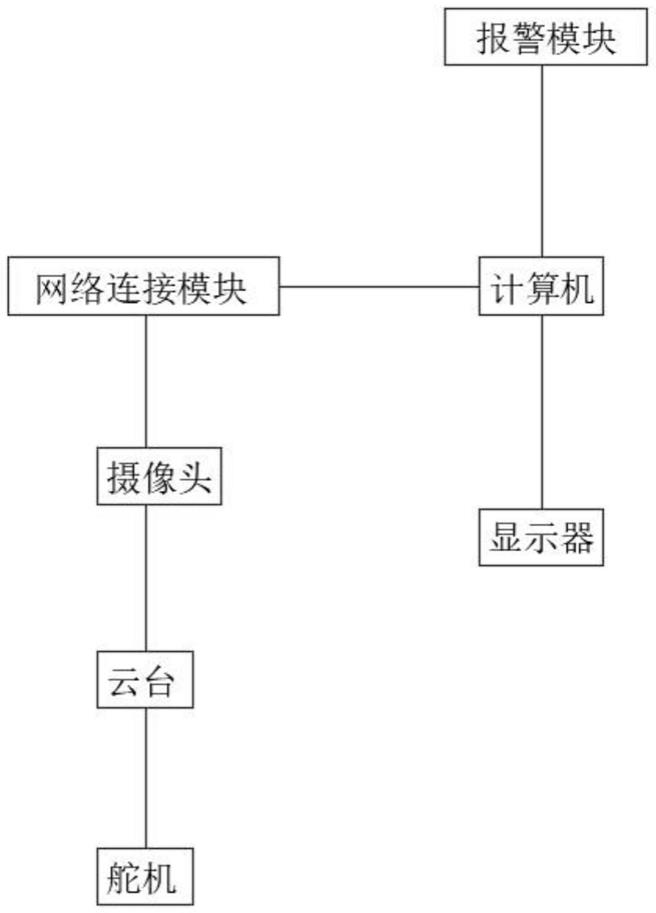
11.图1是本实用新型一种基于边缘计算的飞机检测跟踪识别系统的整体系统结构图。
12.如图所示:1、双自由度摄像头,2、控制云,3、舵机,4、计算机,5、网络连接模块,6、显示器,7、报警模块。
具体实施方式
13.下面结合附图对本实用新型一种基于边缘计算的飞机检测跟踪识别系统做进一步的详细说明。
14.结合附图1,一种基于边缘计算的飞机检测跟踪识别系统,包括双自由度摄像头1,所述双自由度摄像头1下部设有云台2,所述云台2设有舵机3,所述舵机3控制云台2上的双自由度摄像头1转动,还包括计算机4,所述双自由度摄像头1通过网络连接模块5与所述计算机4连接,所述计算机4设有显示器6以及报警模块7。
15.所述舵机3采用串口通信方式控制云台2。
16.所述显示器6实时显示双自由度摄像头1所采集的图像,所述计算机4实时处理双自由度摄像头1所采集的图像。
17.所述报警模块7在目标飞机无法被检测、跟踪或识别时进行报警。
18.本实用新型在具体实施时,舵机3控制双自由度摄像头1转动对目标飞机检测,检测图像通过网络连接模块5传回计算机4处理并显示在显示器6上,报警模块7起到异常报警作用。
19.本基于边缘计算的飞机检测跟踪识别系统,减少人工收集数据与处理数据的人力与时间成本,有利于获取更全面,更高质量的数据,边缘计算平台所占空间较小,便携性强,可移植性强,飞机型号类型识别精度更高,具有很高的实用价值和推广价值。
20.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
技术特征:
1.一种基于边缘计算的飞机检测跟踪识别系统,其特征在于:包括双自由度摄像头(1),所述双自由度摄像头(1)下部设有云台(2),所述云台(2)设有舵机(3),所述舵机(3)控制云台(2)上的双自由度摄像头(1)转动,还包括计算机(4),所述双自由度摄像头(1)通过网络连接模块(5)与所述计算机(4)连接,所述计算机(4)设有显示器(6)以及报警模块(7)。2.根据权利要求1所述的一种基于边缘计算的飞机检测跟踪识别系统,其特征在于:所述舵机(3)采用串口通信方式控制云台(2)。3.根据权利要求1所述的一种基于边缘计算的飞机检测跟踪识别系统,其特征在于:所述显示器(6)实时显示双自由度摄像头(1)所采集的图像,所述计算机(4)实时处理双自由度摄像头(1)所采集的图像。4.根据权利要求1所述的一种基于边缘计算的飞机检测跟踪识别系统,其特征在于:所述报警模块(7)在目标飞机无法被检测、跟踪或识别时进行报警。
技术总结
本实用新型公开了一种基于边缘计算的飞机检测跟踪识别系统:包括双自由度摄像头,所述双自由度摄像头下部设有云台,所述云台设有舵机,所述舵机控制云台上的双自由度摄像头转动,还包括计算机,所述双自由度摄像头通过网络连接模块与所述计算机连接,所述计算机设有显示器以及报警模块。所述舵机采用串口通信方式控制云台。所述显示器实时显示双自由度摄像头所采集的图像,所述计算机实时处理双自由度摄像头所采集的图像。所述报警模块在目标飞机无法被检测、跟踪或识别时进行报警。舵机控制双自由度摄像头转动对目标飞机检测,检测图像通过网络连接模块传回计算机处理并显示在显示器上。示器上。示器上。
技术研发人员:余锴熔 王善泽 隋宋宸 周帅广 梁保兴
受保护的技术使用者:东北大学
技术研发日:2021.08.10
技术公布日:2022/2/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
