1.本发明涉及船舶导航技术领域,具体涉及一种船舶综合跟踪系统和船舶执法终端。
背景技术:
2.随着经济的飞速发展,水路的运输里程不断增加,水运规划正在成型。水运的监管和取证也变得越来越困难。例如:岸侧的摄像头数量少,费用高,且岸侧视角的船舶行驶过程中的图像难以获取。船舶越线停靠、非法停泊、非法装卸等需现场执法;水运的航道场景难以固定,水位变化大,且无法判定。
3.现有的船舶的行政执法信息化手段相对落后,采用人工巡查的方式进行监管,往往是人工驾驶执法艇完成现场执法工作。需要在执法艇上还需安装独立的光电侦察设备,用于远距离图像识别、执法视频记录。在执法过程当中,执法艇至少需要三人,分别负责开船、观察和执法视频记录。由于单独安装的光电侦察设备,还无法做到与船舶综合导航系统的联动,无法将执法过程中的时间信息、本船位置信息、目标船位置信息、目标视频信息同步记录。
技术实现要素:
4.针对现有技术中的问题,本发明提供一种船舶综合跟踪系统和船舶执法终端,能够实现自动对准跟踪目标,避免了手动操作对准慢、目标跟丢的问题,提高了船舶的侦察速度和准确性。
5.为实现上述目的,本发明提供以下技术方案:
6.一方面,本发明提供了一种船舶综合跟踪系统,主机设备以及分别与所述主机设备连接的惯性导航设备、雷达设备和光电侦察设备;
7.所述惯性导航设备,用于获取船舶本身的航行信息数据以及将所述航行信息数据传输至所述主机设备;
8.所述雷达设备,用于获取目标船舶的方位信息数据以及将所述方位信息数据传输至所述主机设备;
9.所述主机设备,用于根据所述航行信息数据和所述方位信息数据确定目标船舶的位置信息数据;还用于将所述位置信息数据传输至所述光电侦察设备;
10.所述光电侦察设备,用于根据所述位置信息数据确定自身的调整角度数据,基于所述调整角度数据调整自身的侦察方向,以对目标船舶进行跟踪侦察处理。
11.进一步地,还包括:船舶识别设备;
12.所述船舶识别设备连接所述主机设备,用于获取目标船舶的基本信息数据以及将所述基本信息数据传输至所述主机设备;
13.所述主机设备,还用于基于所述基本信息数据对目标船舶的所述位置信息数据进行标记处理。
14.其中,所述光电侦察设备,还用于接收所述主机设备传输来的所述基本信息数据,根据所述基本信息数据对所述跟踪侦察处理得到的侦测信息数据进行标记处理。
15.进一步地,还包括:海图显示设备;
16.所述海图显示设备连接所述主机设备,用于接收所述主机设备传输来的所述基本信息数据和所述位置信息数据,以及对所述基本信息数据和所述位置信息数据进行可视化处理。
17.进一步地,还包括:导航定位设备;
18.所述导航定位设备连接所述主机设备,用于获取船舶本身的全球定位数据并将所述全球定位数据传输至所述主机设备,以使所述主机设备基于所述全球定位数据确定船舶的经度和纬度。
19.进一步地,还包括:冗余电源设备;
20.所述冗余电源设备连接所述主机设备,用于所述主机设备发生供电故障时对所述主机设备进行供电;
21.所述冗余电源设备,用于将输入的交流电和/或直流电转换为符合预设电源参数的直流电;
22.其中,所述预设电源参数是根据所述主机设备的供电需求设置的。
23.进一步地,还包括:测深设备;
24.所述测深设备连接所述主机设备,用于获取船舶下方的水深信息数据并将所述水深信息数据传输至所述主机设备,以使所述主机设备基于所述水深信息数据确定船舶下方水的深度。
25.进一步地,还包括:控制设备;
26.所述控制设备连接所述主机设备,用于获取用户输入的控制指令并将所述控制指令发送至主机设备,以使所述主机设备执行所述控制指令。
27.进一步地,还包括:通信交互设备;
28.所述通信交互设备连接所述主机设备,用于将所述主机设备获取的数据发送至远程终端。
29.另一方面,本发明还提供了一种船舶执法终端,包括:操控系统、航电系统和救生系统;还包括:上述船舶综合跟踪系统。
30.由上述技术方案可知,本发明所述的一种船舶综合跟踪系统和船舶执法终端,通过光电侦察设备自动对准跟踪目标,避免了手动操作对准慢、目标跟丢的问题,提高了侦察速度、准确性和实用性。
附图说明
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
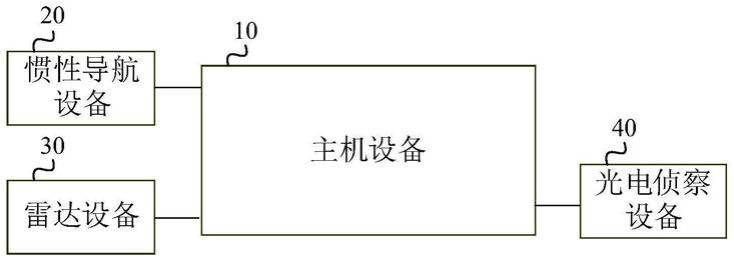
32.图1是本发明实施例提供的船舶综合跟踪系统的第一结构示意图;
33.图2是本发明实施例提供的船舶综合跟踪系统的第二结构示意图;
34.图3是本发明实施例提供的船舶综合跟踪系统的第三结构示意图;
35.图4是本发明实施例提供的船舶综合跟踪系统的第四结构示意图;
36.图5是本发明实施例提供的船舶综合跟踪系统的第五结构示意图;
37.图6是本发明实施例提供的船舶综合跟踪系统的第六结构示意图;
38.图7是本发明实施例提供的船舶综合跟踪系统的第七结构示意图;
39.图8是本发明实施例提供的船舶综合跟踪系统的第八结构示意图;
40.图9是本发明实施例提供的船舶综合跟踪系统中数据记录模块的结构示意图;
41.图10是本发明实施例提供的船舶综合跟踪系统的具体硬件结构示意图。
具体实施方式
42.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.本发明下述实施例提出了一种船舶综合跟踪系统,参见图1,该船舶综合跟踪系统,包括:主机设备10以及分别与主机设备10连接的惯性导航设备20、雷达设备30和光电侦察设备40;
44.其中,惯性导航设备20,用于获取船舶本身的航行信息数据以及将航行信息数据传输至主机设备10;
45.在本实施例中,惯性导航设备20用于提供本船的航行信息数据,该航行信息数据包括经纬度坐标、航向、艏向、航速、本船姿态、3轴陀螺仪的数据、轴加速度计的数据以及双gnss(global navigation satellite system,全球导航卫星系统)接收机接收的数据中至少一种。通过卫星/惯性组合导航算法,可提供精确、高实时性及可靠性的多参数导航信息。
46.雷达设备30,用于获取目标船舶的方位信息数据以及将方位信息数据传输至主机设备10;在本实施例中,雷达设备30还用于提供探测礁石、海岸等物体的雷达回波视频,以及它船arpa(auto radarplotting aids,自动雷达标绘仪)航迹数据。在具体实施时,雷达设备30采用fpga(field programmable gate array,现场可编程逻辑门阵列)芯片和arm(advanced risc machines)芯片的形式。其中,fpga芯片与雷达天线硬信号连接,主要负责雷达视频采样及网络化分发、雷达调谐、触发、天线发射控制。arm芯片部分是数据处理及综合显示的核心,具体负责雷达信号检测、目标跟踪录取以及综合显示控制。雷达设备30向主机设备10的雷达数据解析模块提供数据。
47.主机设备10,用于根据航行信息数据和方位信息数据确定目标船舶的位置信息数据;还用于将位置信息数据传输至光电侦察设备40;
48.在具体实施时,主机设备10采用飞腾ft2000cp的主板,装载银河麒麟操作系统,运行执法综合信息化系统软件。
49.光电侦察设备40,用于根据位置信息数据确定自身的调整角度数据,基于调整角度数据调整自身的侦察方向,以对目标船舶进行跟踪侦察处理。
50.在本实施例中,光电侦察设备40负责全天候全天时对海上目标进行全方位探测、跟踪、监视和视频取证,具有手动和自动扫描、搜索、跟踪目标的功能,具备手动锁定目标后
上报目标基本信息(方位、距离、速度)的功能,具有调焦、变倍等光学参数电动调节功能,具有图像陀螺稳定功能。
51.在具体实施时,光电侦察设备40包括可见光摄像机、红外热像仪、陀螺中至少一种。光电侦察设备40为2路网络摄像机,通过以太网接口向主机设备10提供h.264格式的摄像机视频信息。
52.本发明实施例提供给的一种船舶综合跟踪系统,通过光电侦察设备40自动对准跟踪目标,避免了手动操作对准慢、目标跟丢的问题,提高了侦察速度、准确性和实用性。
53.在一实施例中,参见图2,上述船舶综合跟踪系统还包括:船舶识别设备50;
54.船舶识别设备50连接主机设备10,用于获取目标船舶的基本信息数据以及将基本信息数据传输至主机设备10;
55.主机设备10,还用于基于基本信息数据对目标船舶的位置信息数据进行标记处理。
56.本实施例中,船舶识别设备50接收海域内所有船舶的基本信息数据。其中,船舶的基本信息数据包括:船名、船长、船舶大小、船舶位置、目的地中至少一种,并对基本信息数据进行解析后在电子海图上标识船舶坐标。
57.进一步地,光电侦察设备40,还用于接收主机设备10传输来的基本信息数据,根据基本信息数据对跟踪侦察处理得到的侦测信息数据进行标记处理。
58.可以理解的是,光电侦察设备40进行标记处理是为了将基本信息数据和跟踪侦察处理得到的侦测信息数据共同对船舶进行描述或画像。
59.在一实施例中,参见图3,上述船舶综合跟踪系统还包括:海图显示设备60;
60.海图显示设备60连接主机设备10,用于接收主机设备10传输来的基本信息数据和位置信息数据,以及对基本信息数据和位置信息数据进行可视化处理。
61.本实施例中,海图显示设备60包括:触摸显示器,具有触摸操作、1080p像素的图像显示。
62.对基本信息数据和位置信息数据进行可视化处理,实现将目标位置、航迹信息在电子海图上叠加显示,提高了船舶综合跟踪系统的直观性、易用性。
63.在一实施例中,参见图4,上述船舶综合跟踪系统,还包括:导航定位设备70;
64.导航定位设备70连接主机设备10,用于获取船舶本身的全球定位数据并将全球定位数据传输至主机设备10,以使主机设备10基于全球定位数据确定船舶的经度和纬度。
65.在具体应用时,使用北斗组合惯导提供定位、定向、航速、姿态信息,采用双gnss(global navigation satellite system,全球导航卫星系统)天线差分数据,通过卫星/惯性组合导航算法,提高了数据精度及实时性,航向精度0.1度,定位精度2cm,姿态精度0.2度,更新速率100hz。提高了船舶综合跟踪系统的准确性和实时性。
66.在一实施例中,参见图5,上述船舶综合跟踪系统,还包括:冗余电源设备80;
67.冗余电源设备80连接主机设备10,用于主机设备10发生供电故障时对主机设备10进行供电;
68.冗余电源设备80,用于将输入的交流电和/或直流电转换为符合预设电源参数的直流电;具体实施时,能够同时接入发电机的交流电源和船载电池的直流电源,进行冗余备份供电。
69.其中,预设电源参数是根据主机设备的供电需求设置的。
70.在一实施例中,参见图6,上述船舶综合跟踪系统,还包括:测深设备90;
71.测深设备90连接主机设备10,用于获取船舶下方的水深信息数据并将水深信息数据传输至主机设备10,以使主机设备10基于水深信息数据确定船舶下方水的深度。
72.在一实施例中,参见图7,上述船舶综合跟踪系统,还包括:控制设备100;
73.控制设备100连接主机设备10,用于获取用户输入的控制指令并将控制指令发送至主机设备10,以使主机设备10执行控制指令。
74.本实施例中,控制设备100包括:快捷操控键盘、鼠标和按键旋钮中至少一种。
75.在一实施例中,参见图8,上述船舶综合跟踪系统,还包括:通信交互设备110;
76.通信交互设备110连接主机设备10,用于将主机设备10获取的数据发送至远程终端。在本实施例中,通信交互设备110采用kd5660交换芯的以太网交换模块,为船舶综合跟踪系统提供数据网络交换功能,以太网交换模块采用硬件转发方式,支持二层线速转发。
77.在一实施例中,上述船舶综合跟踪系统中,还包括:数据记录模块;
78.在具体实施时,数据记录模块连接主机设备10。参见图9数据记录模块采用海思hi3536芯片、sata(serial ata)接口固态硬盘及其外围接口电路组成,其中,外围接口电路包括:ddr3(double data rate)接口电路、flash接口电路、usb接口电路和串口接口电路。hi3536芯片接收数据,向通过sata接口固态盘进行存储。需要说明的是,数据记录后,数据回放则为数据记录的逆过程。
79.数据记录模块用于将实时将执法视频信息、导航雷达信息、全船状态信息进行融合记录。具有多通道数据提取功能,支持提供单传感器的解耦数据、多传感器的融合数据等数据提取模式。将雷达设备30、光电侦察设备40、船舶识别设备50、惯性导航设备20、测深设备的数据在统一的时空坐标下记录回放,支持同时间轴、同空间轴下数据的融合记录回放。具有统计分析功能,支持对敏感区域目标活动规律的统计分析,为排查潜在隐患提供大数据支撑,也为海洋大数据建设提供数据积累。
80.在本实施例中,数据记录模块的嵌入式软件主要包括五个部分:数据记录部分、数据回放部分、数据检索与提取部分、统计分析部分和一键销毁部分。
81.本发明实施例还提供了上述船舶综合跟踪系统的具体硬件结构,参见图10,船舶综合跟踪系统的主机设备选择高可靠性的cpex总线架构,采用抗振动冲击性能优良的atr(arinc atr racking system)机箱设计,包括主板模块、以太网交换模块、导航雷达模块、数据记录模块、dcdc(直流转直流,direct current,简称dc)电源模块,各模块为刀片插卡设计。
82.其中,dcdc电源模块接收冗余电源传输的直流电。在本实施例中,冗余电源将外部输入的发电机交流电进行交直流转换,将外部输入的电池直流电进行直流电压转换,最终输出直流电。需要说明的是,本实施例中的冗余电源输出dc24v的直流电。
83.导航雷达模块通过雷达天线接收雷达信号。
84.主板模块分别与ais(automatic identification system,船舶自动识别系统)设备、测深仪、北斗组合惯导和显控单元相连接。ais设备通过ais天线接收覆盖范围内其他船舶的信息。测深仪通过换能器将电能转换成声能的以及将声能转换成电能。北斗组合惯导通过北斗前天线和北斗后天线的双天线接收差分数据,通过惯性组合导航算法,提高了精
度及实时性。
85.其中,显控单元包括:显示设备和控制设备。其中,显示设备为显示器,控制设备为键盘、鼠标和按键旋钮。显示器可以具有触摸功能。
86.以太网交换模块与光电侦察设备相连接。光电侦察设备对海上目标进行全方位探测、跟踪、监视和视频取证,具有手动和自动扫描、搜索、跟踪目标的功能,具备手动锁定目标后上报目标基本信息(方位、距离、速度)的功能,具有调焦、变倍等光学参数电动调节功能,具有图像陀螺稳定功能。
87.本发明实施例还提供了一种船舶执法终端,包括:上述实施例中的船舶综合跟踪系统,还包括:操控系统、航电系统、救生系统。
88.其中,操控系统用于船舶的主机控制;航电系统用于船舶内设备的供电;救生系统用于船舶救生设备的控制。
89.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
90.本发明的说明书中,说明了大量具体细节。然而能够理解的是,本发明的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。类似地,应当理解,为了精简本发明公开并帮助理解各个发明方面中的一个或多个,在上面对本发明的示例性实施例的描述中,本发明的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。然而,并不应将该公开的方法解释呈反映如下意图:即所要求保护的本发明要求比在每个权利要求中所明确记载的特征更多的特征。更确切地说,如权利要求书所反映的那样,发明方面在于少于前面公开的单个实施例的所有特征。因此,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本发明的单独实施例。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。本发明并不局限于任何单一的方面,也不局限于任何单一的实施例,也不局限于这些方面和/或实施例的任意组合和/或置换。而且,可以单独使用本发明的每个方面和/或实施例或者与一个或更多其他方面和/或其实施例结合使用。
91.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。