技术特征:
1.一种基于点云特征与蒙特卡洛扩展法的动态物体去除,其特征在于,包括以下步骤:s1,构建点云数据样本数据集,并构建三维的全局坐标系,初始化环境信息。s2,提取全局坐标系下的点云数据并计算其局部曲率、惯性张量矩阵和协方差矩阵作为点云空间分布特征。s3,搭载点云滤波器进行预处理,去除孤立点和边缘点。s4,创新性地提出了一种从中心到边缘的点云聚类算法,对预处理后的点云数据基于新设计的点云聚类算法聚类并确定对象的轮廓。s5,使用蒙特卡洛法对全概率公式进行改进,并递推和计算出点云粒子的影响权重,推断聚类对象状态,动态对象去除,静态对象保留。有效的去除了物理环境中移动物体的动态信息,得到了一个真实的静态物理环境。2.根据权利要求书1所述的基于点云特征与蒙特卡洛扩展法的动态物体去除,其特征在于:所述步骤s2对所求局部曲率的大小进行划分,从小到大依次为孤立点、边缘点、棱点以及平面点。根据所求惯性张量矩阵和协方差矩阵描绘点云的形状特征。所述步骤s3中三维空间的点云投影到xoy平面,并基于x方向和y方向的距离均匀网格化,将每个网格的尺寸设置为0.2m
×
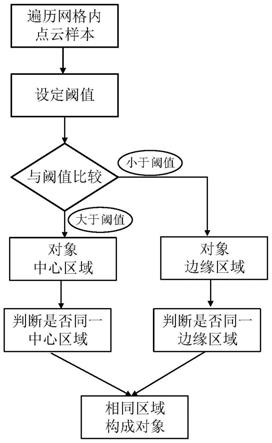
0.2m,去除孤立点和边缘点后,仍能确保每个网格内至少要有一个棱点或平面点。3.根据权利要求书1所述的基于点云特征与蒙特卡洛扩展法的动态物体去除,其特征在于:所述步骤s4创新性地提出了一种从中心到边缘的点云聚类算法,具体过程如下(见附图):首先,遍历网格图内的点云,连接点云密度大于阈值的网格,获取所需对象的中心区域。传感器到任意两个中心点云之间的夹角记为β,距离分别d1和d2,为如果夹角β小于给定阈值θ,判断两点为不同对象,如果夹角β大于给定阈值θ,判断两点为不同对象。利用公式进一步对非中心点云处理,确定边缘点云。从而从对象的中心区域周围获取精确的边缘区域,组合对象的中心区域和边缘区域,从而获得一个完全独立的对象。4.根据权利要求书1所述的基于点云特征与蒙特卡洛扩展法的动态物体去除,其特征在于:所述步骤s5使用蒙特卡洛法对后验概率公式进行改进。根据全概率公式,系统当前的期望状态可以表示为:上式中,q(x
t
|z
1:t
)为建议分布,w(x
t
)表示每一个粒子的权重。根据后验概率公式p(z
1:t
)=∫p(z
1:t
|x
t
)p(x
t
)dx
t
并采用蒙特卡洛法对全概率公式的积分部分求解,得到改进后的系统期望状态。
其中,i是点云样本的序号,是点云归一化之后的权重。为了提高效率,可以通过递推的方式更新点云粒子的权重。最后,归一化每个对象中的点云粒子的影响权重,累加所有点云粒子的影响权重并求均值作为系统状态的估计值,根据估计值判断聚类对象是否动态,动态对象去除,静态对象保留。有效的去除了物理环境中移动物体的动态信息,得到了一个真实的静态物理环境。
技术总结
本发明公开了一种基于点云特征与蒙特卡洛扩展法的动态物体去除,解决了SLAM系统中出现动态对象的问题。该方法包括,步骤一,构建点云数据样本数据集,并构建三维的全局坐标系,初始化环境信息。步骤二,提取全局坐标系下的点云数据并计算其局部曲率、惯性张量矩阵和协方差矩阵作为点云空间分布特征。步骤三,搭载点云滤波器进行预处理,去除孤立点和边缘点。步骤四,创新性地提出了一种从中心到边缘的点云聚类算法,对预处理后的点云数据基于新设计的点云聚类算法聚类并确定对象的轮廓。步骤五,使用蒙特卡洛法对全概率公式进行改进,并递推和计算出点云粒子的影响权重,推断聚类对象状态,动态对象去除,静态对象保留。本发明有效的去除了物理环境中移动物体的动态信息,得到了一个真实的静态物理环境。到了一个真实的静态物理环境。到了一个真实的静态物理环境。
技术研发人员:尤波 孙家宝 李佳钰 庄天扬
受保护的技术使用者:哈尔滨理工大学
技术研发日:2021.11.26
技术公布日:2022/2/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。