1.本发明属于焊装线数据处理技术领域,特别涉及焊装车间焊装线体的点云数据处理方法。
背景技术:
2.随着新建焊装车间日益饱和,主机厂为了满足更多车型的投入,往往倾向于在原有焊装线体上进行新车型的导入。为了降低改造项目的风险,往往需要在项目改造前,对线体设备进行点云扫描,扫描完成后将所需数据转化为点云数据,提供给仿真工程师进行现场干涉检查验证。
3.影响点云数据处理有两个方面。其一,扫描数据的完整性。由于扫描站点布局不合理,容易导致所扫描的线体的点云数据不齐全,点云数据缺失;影响数据的完整性,其次,扫描站点布局不规范,容易导致扫描过度重复,影响扫描的效率。其二,点云数据的处理方法。以往,在完成线体的点云扫描后,需要采用点云处理软件进行数据处理后,给到仿真工程师进行验证。点云数据处理,一般会采用与扫描设备匹配的软件进行处理,如faro扫描的点云数据是采用scene软件进行处理,徕卡扫描的点云数据是采用cyclone软件处理;但其均存在着数据处理耗时长和因数据量大不易存储和数据传输的问题;尤其是数据轻量化效果不显著,仅能优化约60%,轻量化后的数据内存超过20g,仍然不能导入仿真软件pdps。同时scene软件处理后的数据往往形成的点云数据无法进行去噪和轻量处理,另,应用第三方扫描软件处理数据时,如:采用infipoints和polywork等软件对点云数据进行处理;但是,由于扫描站点布局不合理,使得各扫描站点的数据无法一次性拼接成一个完成的点云数据,需要人工辅助进行拼接,人工辅助的方式同样耗时长,并且需要根据两个相邻站点的相同的元素进行拼接处理,处理后的点云数据精度降低。
技术实现要素:
4.本发明是为避免上述现有技术所存在的不足,提供一种焊装线体点云数据的快速处理方法。首先,采用高效的扫描站点布局的方法,其次,应用scene软件进行数据拼接,最后,应用infipoints软件进行点云数据去噪和轻量化处理。以实现快速、高效的点云数据拼接、去噪和轻量化处理,并根据不同的需求输出不同要求的点云数据。
5.本发明为解决技术问题采用如下技术方案:
6.本发明焊装线体点云数据的快速处理方法的特点是:
7.包括步骤:
8.步骤一、利用扫描仪对位于焊装线体的各站点依次进行扫描,分别获取各站点的点云数据;
9.所述焊装线体中的每个工位均布置有五个站点,每个工位中所述的各站点的位置布局为立体五边型;
10.步骤二、将所述各站点的点云数据输入数据处理软件中进行处理,获得完整的焊
装线体点云数据;
11.所述的处理包括对全部点云数据进行数据拼接、去噪和轻量化处理。
12.本发明焊装线体点云数据的快速处理方法的特点也在于:
13.所述立体五边型布置,包括处在同一水平面上的四个水平站点,且所述四个水平站点均匀分布在被扫描线体的工位四周;另外一个扫描站点布置在由所述四个平面扫描站点所形成的几何中心位置上,并处在与四个水平站点所在水平面的不同高度,形成立体五边型布局。
14.本发明焊装线体点云数据的快速处理方法的特点也在于:
15.所述利用扫描仪对位于焊装线体的各站点依次进行扫描,包括:
16.扫描仪单次扫描一个站点,在当前扫描站点扫描结束后,将扫描仪按照设定的移动路径移动至下一扫描站点,相邻的扫描站点的距离为5m;通过扫描获取的站点点云数据存储在扫描仪的内存卡中。
17.本发明焊装线体点云数据的快速处理方法的特点也在于:
18.扫描仪扫描单个工位中五个站点的所述移动路径为“z”型,相邻工位的移动路径关于工位中线对称。
19.本发明焊装线体点云数据的快速处理方法的特点也在于:
20.所述的数据拼接、去噪和轻量化处理包括:应用软件scene中选择注册为“俯视图和云对云”的方法完成针对所有站点点云数据的拼接,并将完成拼接的数据保存为lsproj格式数据;针对所述lsproj格式数据采用应用软件infipoints进行去噪和轻量化处理,实现焊装线体点云数据的快速处理,获得完整的焊装线体点云数据。
21.与已有技术相比,本发明有益效果体现在:
22.1、本发明现场逐点扫描获取各站点点云数据,利用数据处理软件进行数据拼接、去噪和轻量化处理,从而获得完整的焊装线体点云数据,实现了快速高效的点云数据处理;
23.2、本发明将扫描仪位置按照立体五边型布置,相邻的扫描站点之间的距离控制在5m范围内,不需要使用标靶球,因此节省了扫描过程中移动标靶球的时间;
24.3、本发明采用无标靶球扫描的方法,针对这种无目标拼接的点云数据,采用俯视图和云对云的注册方法,能够快速将相邻点云数据的之间的重叠面进行拼接,有助理提高点云拼接的精度。
25.4、本发明将与扫描硬件相配套的软件和第三方的点云处理软件相结合,能有效提升点云数据处理的精度,数据处理效率至少提升了20%。
附图说明
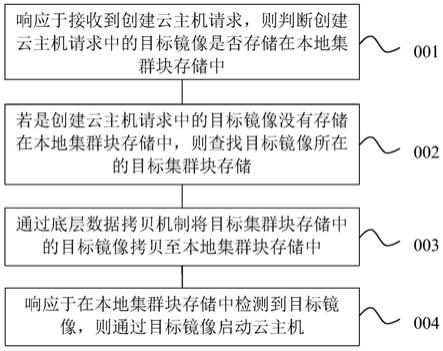
26.图1为本发明方法中扫描站点分布及移动路径示意图;
具体实施方式
27.本实施例中焊装线体点云数据的快速处理方法包括步骤:
28.步骤一、利用扫描仪对位于焊装线体的各站点依次进行扫描,分别获取各站点的点云数据;焊装线体中的每个工位均布置有五个站点,每个工位中的各站点的位置布局为立体五边型;
29.步骤二、将各站点的点云数据输入数据处理软件中进行处理,获得完整的焊装线体点云数据;处理包括对全部点云数据进行数据拼接、去噪和轻量化处理。
30.本实施例中通过现场各扫描站点的逐点扫描获取各站点点云数据,针对所有站点点云数据,利用数据处理软件进行数据拼接、去噪和轻量化处理,获得完整的焊装线体点云数据。
31.本实施例按如下方式确定各扫描站点的布局,使扫描线体的设备都能够得到点云数据:
32.立体五边型布置包括处在同一水平面上的四个水平站点,且四个水平站点均匀分布在被扫描线体的工位四周;另外一个扫描站点布置在由四个平面扫描站点所形成的几何中心位置上,并处在与四个水平站点所在水平面的不同高度,形成立体五边型布局;采用立体五边型布局使在平面位置和空间高度上都得到满足。
33.利用扫描仪对位于焊装线体的各站点依次进行扫描,包括:扫描仪单次扫描一个站点,在当前扫描站点扫描结束后,将扫描仪按照设定的移动路径移动至下一扫描站点,相邻的扫描站点的距离为5m;通过扫描获取的站点点云数据存储在扫描仪的内存卡中。
34.本实施例在扫描过程中取消设置标靶球,根据扫描仪特性,faro扫描仪的距离误差在10-25m为0.1mm,当扫描站点间距为10m,两次扫描面积重合率为30%,而当扫描站点间距为5m时,两次扫描面积重合率超过60%;因此,相邻的扫描站点的距离为5m或不超过5m为最佳。
35.如图1所示,本实施例中扫描仪扫描单个工位中五个站点的移动路径为“z”型,相邻工位的移动路径关于工位中线对称。图1中所示,线体起始端起,依次经过第一扫描站点1、第二扫描站点2、第三扫描站点3、第四扫描站点4、第五扫描站点5、第六扫描站点6、第七扫描站点7、第八扫描站点8、第九扫描站点9和第十扫描站点10形成“z”型移动路径。图1所示为主线的焊装线体两个工位,分别是第一工位21和第二工位22,各工位包含有机器人,机器人落位在机器人底座上,如图1中所示的圆形底座23,辊床24位于机器人中间,机器人和辊床外围为安全围栏25。
36.具体实施中,在一条焊装线体中布置多达上百个的扫描站点,每个扫描站点形成一个站点点云数据;数据拼接、去噪和轻量化处理包括:应用软件scene中选择注册为“俯视图和云对云”的方法完成针对所有站点点云数据的拼接,并将完成拼接的数据保存为lsproj格式数据;针对lsproj格式数据采用应用软件infipoints进行去噪和轻量化处理,实现焊装线体点云数据的快速处理,获得完整的焊装线体点云数据。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。