一种基于cfd和mlp的仿生鱼水动力预测方法
技术领域
1.本发明属于海洋工程和仿生机器人领域,具体涉及一种基于cfd和mlp的仿生鱼水动力预测方法,适用于水下仿生机器鱼的运动模式和水动力优化预测问题。
背景技术:
2.水下机器人因其智能、便捷、高效等优点,在认识海洋、发展海洋、经略海洋的过程中发挥着越来越重要的作用。除了在民用领域有着广泛的应用前景外,水下机器人在国防建设和军事领域等方面也有强大的应用潜能。尤其是仿生型水下机器人由于独特的灵活性和隐蔽性,成为研发人员关注的焦点。
3.对于水下机器人参数优化问题,授权公告号为cn 112800690 b的发明专利公开一种基于群智能优化算法下的水下折展机构参数优化方法,利用流固耦合仿真模拟获取不同外形参数下的工作性能参数、借助bp神经网络模型与支持向量回归模型svr联合预测,快速扩充数据集,使用粒子群优化算法,通过粒子寻优对数据进行分析,获取最优性能参数下的结构参数,探索并实现符合实际生产需求的结构最优目标。
4.同样的,仿生机器鱼因具有优越的水动力性能而被广泛采用,通常仿生机器鱼由身体或尾鳍驱动。行波模型是经典的鱼类游动模式,但是传统模型中仿生鱼头部为刚性,没有波动,而实际鱼类游动时头部有小幅度的波动,改进的行波模型将鱼的游动转化为尾部相对于头部的运动函数,然而没有展现出从静止到加速再到稳定的过程。目前,传统的模型并不能完全逼真地反映鱼类的游动姿态,对其运动模式的研究和预测与实际情况具有一定的偏差,且模型中的参数影响仿生鱼的水动力性能和效率,故而寻求一种方法对运动模型和参数进行优化并进行水动力预测是至关重要的。
技术实现要素:
5.本发明针对传统模型存在的缺陷,提出一种基于cfd和mlp的仿生鱼水动力预测方法,基于计算流体动力学(cfd)和多层感知机(mlp)对仿生鱼的运动参数和水动力性能进行研究和预测,以确定出既可以实现快速启动又可以提升准稳态游动速度和运动效率的运动学参数。
6.本发明是采用以下的技术方案实现的:一种基于计算流体动力学(computational fluid dynamics,cfd)和多层感知机(multilayer perceptron,mlp)的仿生鱼水动力预测方法,包括以下步骤:
7.步骤a、建立自推进运动模型:考虑仿生鱼的头部小幅摆动,对初始模型进行优化,在振幅包络线中增加常数项,为实现在t=0时刻启动的自推进运动,在行波函数前增加时间系数,优化的自推进模型表示如下:
8.y(x,t)=[1-1/(1 10t)](c0 c1x c2x2)sin(kx ωt)
[0009]
式中,y是横向波动位移;x是沿轴向的位移;t是时间;c0是包络线的常数项,c1和c2分别是振幅线性包络和二次包络的系数;k是行波的波数,λ代表波长,k=2π/λ;f表示波动
的频率,ω=2πf;1-1/(1 10t)是时间系数;
[0010]
步骤b、数值模拟并构建数据集:根据所建立的自推进运动模型,基于cfd对仿生鱼的游动进行数值模拟,根据数值模拟结果,基于输入参数和输出参数构建数据集;
[0011]
步骤c、建立水动力预测模型及验证:基于mlp建立水动力预测模型,并根据步骤b中构建的数据集对模型进行训练和测试,验证预测模型的准确性和泛化能力。
[0012]
进一步的,所述步骤b具体包括以下步骤:
[0013]
步骤b1、构建仿生鱼二维游动几何模型:确定前景几何模型和背景流域,仿生鱼为前景,流域为背景,前景与背景相重合构成二维游动几何模型;
[0014]
步骤b2、划分网格:采用重叠网格法对步骤b1中建立的二维几何模型进行网格划分,然后进行网格独立性验证以消除网格尺寸给仿真结果造成的影响,确定理想的网格参数;
[0015]
步骤b3、融合模型:根据用户自定义程序将二维游动几何模型和自推进运动模型融合在一起,并定义波动模式和关键参数,将二维不可压缩非定常navier-stokes方程作为控制方程;
[0016]
步骤b4、数值模拟:确定变量并设置边界条件,调用并编译用户自定义程序,确定求解方法、时间步长、模拟时间后进行数值模拟计算并记录仿真结果,研究变量参数对水动力的影响。
[0017]
进一步的,所述步骤b1中,具体的:构建前景几何模型采用naca0012翼型作为鱼体,以翼型弦长为鱼体中线,采用二次函数描述横向波动的幅度,前景区域范围是2.5l
×
1.5l;建立二维矩形背景流域,前景模型与背景流域相重合,背景流域的大小为18l
×
5l。
[0018]
进一步的,所述步骤b2中,采用重叠网格法对二维几何模型进行网格划分并进行网格独立性验证,具体包括:
[0019]
(1)分别对前景区域的边线和鱼体轮廓线的元素尺寸进行限定,鱼体轮廓添加边界层并确定首层高度和层数,计算雷诺数re和常量y
的数值;
[0020][0021][0022]
式中,ρ表示流体的密度,v表示仿生鱼的迎流速度;l是鱼体的轴向长度;μ表示流体的动力粘度;υ表示流体的运动粘度;hf表示边界层首层高度;
[0023]
(2)背景区域的面网格划分方法采用四边形划分,带有鱼体边界层的前景网格是非结构化的,而背景网格是结构化的;
[0024]
(3)网格进行三种水平的划分,背景网格的尺寸保持一致,仅改变前景网格及鱼体网格,三种网格的仿真参数保持一致,进行网格的独立性分析。
[0025]
进一步的,所述步骤b3中,在用户自定义程序中定义变量参数及波动模式,推力由身体后部和尾部波动产生,输入参数包括频率、波长和头部振幅,根据不同时刻的推力实时计算前进的加速度、速度和位移,输出参数包括速度、位移和加速度,确定输出参数的记录及输出方式。
[0026]
进一步的,所述步骤b4中,基于fluent进行数值模拟,具体包括:
[0027]
(1)采用瞬态模式和k-ωsst湍流模型,流体介质为淡水,前景网格与背景网格设置为重叠交界面;
[0028]
(2)控制方程为二维不可压缩非定常navier-stokes方程,激活动网格选项,用扩散方法对网格进行光顺;
[0029]
(3)求解方法为压力-速度耦合,压力空间离散化设为二阶,动量、湍动能和耗散率均设置为二阶迎风式。
[0030]
进一步的,所述步骤c中,建立mlp水动力预测模型,具体包括:
[0031]
(1)水动力预测模型包含一个输入层、三个隐层和一个输出层,每层包含多个神经元,所有的连接都配有权重;输入层仅用于获取输入变量信息并传递给隐层,不执行任何计算,输入为xi(i=0,1,2,3,4,5),x0到x4表示五个特征变量。常数1作为输入偏置,用x5表示,则
[0032][0033]
(2)在隐层进行计算并将信息传递给输出层,且每个隐层包含的节点数不同;隐层网络的权值分别为w
ij
,w
jk
,w
km
,第一、二、三隐层的输出分别为zj,zk,zm,各隐层的输出分别表示如下:
[0034][0035][0036][0037]
式中,b1,b2,b3分别表示各隐层的偏置;tanh表示隐层的激活函数;
[0038]
(3)输出层的4个节点表示四个输出特征变量,输出层的网络权值为w
mo
,其转置矩阵为w
om
,则输出yo表示为:
[0039][0040]
然后将yo与w
mo
进行矩阵相乘,输出特征变量的数据。
[0041]
进一步的,所述步骤c中,对模型预测结果进行验证,具体包括:
[0042]
(1)基于数值模拟的结果和响应面方法建立二阶响应面预测模型,采用多目标遗传算法对仿生鱼的行波参数进行优化;
[0043]
(2)将优化后的结果作为输入,分别采用cfd、mlp、rsm三种方法预测水动力,验证mlp预测模型的准确性和泛化能力。
[0044]
与现有技术相比,本发明的优点和积极效果在于:
[0045]
本方案基于matlab对行波模型进行研究优化,建立改进的自推进模型,更加逼真
的模拟鱼类的游动姿态;并基于特定翼型建立二维自推进几何模型进行仿真计算,可以简化计算过程提升计算效率;采用重叠网格方法处理动网格问题,避免网格负体积出现,添加边界层网格,使计算精度高且速度快;基于用户自定义程序融合运动学模型和几何模型,定义参数变化及数据输出方式,提升用户操作效率和便捷性;
[0046]
最后根据数值模拟的结果,基于mlp构建水动力预测模型,模型构造简单且预测结果准确,泛化能力强;基于多目标遗传算法对行波参数进行优化,用cfd、mlp、rsm对优化后的参数进行水动力预测,验证mlp预测模型的准确性和泛化能力,增强该方法的置信度,确定了既可以实现快速启动又可以提升准稳态游动速度和运动效率的运动学参数,对水下仿生鱼的研究提供重要的理论支持。
附图说明
[0047]
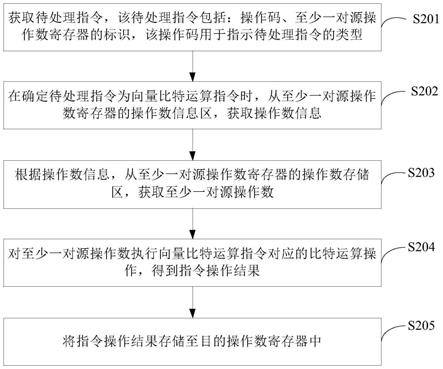
图1是本发明实施例所述预测方法的总体流程图;
[0048]
图2是本发明实施例所述自推进模型的坐标系及仿生鱼受力示意图;
[0049]
图3是本发明实施例所述自推进模型的重叠网格;
[0050]
图4是本发明实施例所述仿生鱼的动网格变化对比图;
[0051]
图5是本发明实施例所述入流速度对水动力影响的分析柱状图;
[0052]
图6是本发明实施例所述波动频率对水动力影响的分析柱状图;
[0053]
图7是本发明实施例所述波长对水动力影响的分析柱状图;
[0054]
图8是本发明实施例所述头部波幅对水动力影响的分析柱状图;
[0055]
图9是本发明实施例所述mlp预测模型的架构示意图;
[0056]
图10是本发明实施例所述mlp和cfd预测速度结果的对比图。
[0057]
图中:1、速度入口;2、背景流域;3、壁面;4、重叠边缘;5、前景流域;6、压力出口;7、鱼体边界层;8、仿生鱼体。
具体实施方式
[0058]
为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图及实施例对本发明做进一步说明。在下面的描述中阐述了许多具体细节以便于充分理解本发明,但是本发明还可以采用不同于此描述的其他方式来实施。因此,本发明并不限于下面公开的具体实施例。
[0059]
本发明是采用以下的技术方案实现的:一种基于计算流体动力学(computational fluid dynamics,cfd)和多层感知机(multilayer perceptron,mlp)的仿生鱼水动力预测方法,包括以下步骤:
[0060]
步骤a、建立改进的自推进运动模型:基于matlab对经典的行波模型进行研究,比较初始模型、改进模型和自推进模型的差异,构建游动更加逼真的仿生鱼自推进运动模型;
[0061]
步骤b、数值模拟并构建数据集:基于cfd对仿生鱼的游动进行数值模拟,游动模式遵循步骤a中建立的自推进运动模型,根据输入参数和数值模拟得到的输出参数构建数据集;
[0062]
步骤c、建立水动力预测模型及验证:基于mlp建立水动力预测模型,利用步骤b中构建的数据集对模型进行训练和测试,验证mlp预测模型的准确性和泛化能力。
[0063]
具体的,下面结合具体实施例对本发明所述预测方法进行详细的说明:
[0064]
步骤a中,基于matlab对经典的行波模型进行研究,比较初始模型、改进模型和自推进模型的差异;在振幅包络线中增加常数项,为了实现在t=0时刻启动的自推进运动,并在行波函数前增加时间系数,具体为:
[0065]
(1)鱼类的运动表达成振幅逐渐增大的推进波,经典的行波运动学模型,表达如下:
[0066][0067]
式中:y是横向波动位移;x是沿轴向的位移;t是时间;c1和c2分别是振幅线性包络和二次包络的系数;k是行波的波数;λ代表波长;f表示波动的频率。
[0068]
该模型假设头部为刚体,没有向x轴两侧的摆动,鱼类游动时,由于惯性和反作用力产生的头部摆动可以通过生物机能抑制。仿生鱼游动时,惯性和反作用力也存在,另外加上鱼体大小、比例配置和加工误差等影响,头部摆动不能完全消除。因此,用上述运动学模型描述仿生鱼的运动并不完全准确。
[0069]
(2)改进后的模型将鱼的游动转化为尾部相对于头部的运动函数,表述如下:
[0070]ft
(x,t)=(c1x c2x2)sin(kx ωt)-c1xsin(ωt)
[0071]
其中c
1 sin(ωt)为y(x,t)在x=0处的一阶导数,然而,改进后的模型仍不具有自推进效果。
[0072]
(3)本实施例考虑仿生鱼的头部小幅摆动,对初始模型进行了优化,在振幅包络线中增加了常数项,为了实现在t=0时刻启动的自推进运动,在行波函数前增加了时间系数,优化后的自推进模型表达如下:
[0073]
y(x,t)=[1-1/(1 10t)](c0 c1x c2x2)sin(kx ωt)
[0074]
式中,1-1/(1 10t)是时间系数;c0是包络线的常数项。假设仿生鱼的总长度为1m,并且定义c0=0.02,c1=-0.08,c2=0.16,λ=0.95m且f=1.0hz。自推进模型表示推力由身体后部和尾部波动产生,根据不同时刻的推力实时计算前进的加速度、速度和位移。随着速度的增加阻力也在增加,直到最后推力和阻力处于动态平衡,游动达到准稳定状态。自推进模型的坐标系及仿生鱼受力如图2所示。
[0075]
步骤b中,具体包括以下步骤:
[0076]
步骤b1、构建仿生鱼二维游动几何模型;
[0077]
(1)采用naca0012翼型代替由身体或尾鳍驱动的鱼类,仿生鱼为前景,流域为背景,前景与背景相重合构成二维游动几何模型;
[0078]
本实施例所研究的自推进模型只涉及轴向的移动和横向的波动,采用naca0012翼型作为鱼,曲线由naca aerofoil sections程序创建,但是曲线后部并不封闭,导入solidworks后手动修补曲线并生成二维模型。鱼体总长l=1m,以翼型弦长为鱼体中线,用二次函数描述横向波动的幅度,如下所示:
[0079][0080]
(2)在solidworks中建立的几何模型以parasolid格式导入ansys workbench,在designmodeler模块中添加与前景流域重叠的背景流域。
[0081]
步骤b2、采用重叠网格法对步骤b1中建立的二维几何模型进行网格划分,然后进行网格独立性验证以消除网格尺寸给仿真结果造成的影响,确定理想的网格参数;
[0082]
本实施例首先对前景组件做网格划分,前景区域范围是2.5l
×
1.5l,面网格划分尺寸设置为20mm。分别对前景区域的边线和鱼体轮廓线的元素尺寸进行限定。前景区域边线元素尺寸为30mm,鱼体轮廓线的元素尺寸为5mm,鱼体轮廓添加边界层。边界层是高雷诺数绕流中紧贴鱼体表面的流动薄层。来流经过鱼体表面会形成边界层,边界层内的流体具有很大的速度梯度。添加边界层网格可以提升数值模拟的精度和计算效率。边界层网格主要由首层高度和层数确定,而首层高度又与雷诺数和y
息息相关。雷诺数是流体力学中表征粘性影响的无量纲数,y
也是一个无量纲值。雷诺数与首层高度的定义如下所示:
[0083][0084][0085]
式中,ρ表示流体的密度,本实施例中定义淡水的密度为998.2kg/m3;v表示仿生鱼的迎流速度;l是鱼体的轴向长度;μ表示流体的动力粘度,取μ=0.001003kg/m
·
s;υ表示流体的运动粘度。设置首层高度为1
×
10-4
m,层数为20,理论计算结果表明不同运动速度下y
值的分布均在合理范围内。不同迎流速度下的雷诺数和y
值计算如表1所示。
[0086]
表1不同迎流速度下的雷诺数和首层高度
[0087][0088]
然后对背景网格进行划分,背景区域的大小为18l
×
5l。背景区域的边线元素尺寸同样设置为30mm,背景区域的面网格划分方法选用四边形。带有鱼体边界层的前景网格是非结构化的,而背景网格是结构化的。划分完成后前景网格与背景网格重叠,但是没有连接关系。为了提升计算效率和精度,在保证网格质量的前提下控制网格数量。重叠网格共包含119223个元素和120382个节点,最差网格质量为0.16593,平均网格质量为0.99553。自推进模型的重叠网格如图3所示。
[0089]
为了验证网格尺寸对数值模拟结果的影响,对网格进行三种水平的划分。背景网格的尺寸保持一致,仅改变前景网格及鱼体网格。三种网格的仿真参数保持一致,v
inlet
=0.5m/s,h=0.02m,λ=0.95m和f=1hz。计算结果表明三种网格尺寸产生的差异并不明显,大尺寸网格在计算过程中会导致动网格畸变,导致求解过程不稳定。当网格细化到一定程度,额外增加网格数量会消耗大量计算资源,但并不会明显地改善数值模拟结果。因此,本实施例选择更加合理的中等尺寸网格。对不同参数的自推进运动进行数值模拟时保持网格一致性,消除网格差异给仿真结果带来的影响。三种网格尺寸及仿真结果如表2所示,假设小尺寸网格的计算结果为真值,误差为0。
[0090]
表2网格尺寸及仿真结果
[0091][0092]
步骤b3、通过用户自定义程序(user defined function,udf)将二维几何模型和自推进模型融合在一起,在udf中定义波动模式和运动参数,确定推力的产生和实时计算方式,将二维不可压缩非定常navier-stokes方程作为控制方程;
[0093]
本实施例中,udf程序定义频率、波长、头部振幅等输入参数和改进的自推进运动模型,定义速度、位移、加速度等为输出参数,st通过上述参数后期进行计算得出。
[0094]
步骤b4、确定变量并设置边界条件,调用并编译udf程序,确定求解方法、时间步长、模拟时间后进行数值模拟计算并记录仿真结果,研究变量参数对水动力的影响;
[0095]
在本实施例中,ansys workbench 2020r2和fluent 2020r2被用于仿真和计算。采用瞬态模式和k-ωsst湍流模型,在广泛的流动域中有更高的精度和可信度。流体介质为淡水,前景网格与背景网格设置为重叠交界面。激活动网格选项,用扩散方法对网格进行光顺,扩散因子为2。求解方法为压力-速度耦合,压力空间离散化设为二阶。动量、湍动能和耗散率均设置为二阶迎风式。控制方程为二维不可压缩非定常navier-stokes方程,其质量和动量守恒式表达如下:
[0096][0097][0098][0099][0100]
式中,u表示x轴的速度分量;v表示y轴的速度分量;p表示压强;ρ表示淡水的密度;t表示时间;
▽2表示拉普拉斯算子。仿生鱼的运动通过udf定义,udf程序以编译的方式嵌入
到fluent中。仿真计算设置时间步长为0.005s,总时间为20s,因此每次模拟的数据量为4000。仿生鱼的动网格变化如图4所示。
[0101]
为了研究入流速度对运动状态的影响,进行五次模拟。入流速度从0.1m/s到0.5m/s,每次间隔为0.1m/s,其余参数保持一致,f=1.0hz,λ=0.95m和h=0.02m。最终,游动速度达到临界值并上下小幅波动,达到准稳定状态。在面对不同的入流速度时,仿生鱼的启动状态有所差异,准稳态游动速度也不同。然而,准稳态迎流速度基本一致,等于准稳态游动速度减去入流速度。峰值加速度和位移随着入流速度的增加而减小。五次模拟达到准稳态时的st基本相同,st取值在0.25到0.26之间。结果表明入流速度对仿生鱼的准稳态速度有显著影响,其余参数不变时,入流速度的增加值等于准稳态速度的减小值。入流速度对水动力的影响分析如图5所示。
[0102]
为了研究波动频率对推进性能的影响,共做了四次模拟,四次模拟频率分别为0.5hz,1.0hz,1.5hz和2.0hz。其余参数保持一致,v
inlet
=0.5m/s,λ=0.95m和h=0.02m。低频波动产生的推力不足,不能使仿生鱼产生向前游动,随频率的增加,准稳态速度也在提高。另外,峰值加速度和位移随着频率的增加也明显变大。然而,st没有显著的变化,仍保持在0.25左右。综上所述,频率对仿生鱼的推力及爆发力具有重要影响。采用合理的频率可以改善准稳态速度及启动响应时间,进一步提升运动灵活性。波动频率对水动力的影响分析如图6所示。
[0103]
为了研究波长对推进性能的影响,共做了六次模拟,六次模拟波长分别设定为0.8m,0.9m,0.95m,1.0m,1.1m,1.2m。其余参数保持一致,v
inlet
=0.5m/s,f=1.0hz和h=0.02m。随着波长由低到高逐渐增加,准稳态游动速度也相应地在缓慢提升,峰值加速度整体呈现出先减小后增加的趋势。但是st却随着波长的增长而逐渐减小,并且随着波长增加尾涡有逐渐变大的趋势。当波长与体长接近时,仿生鱼具有优越的运动性能。波长对水动力的影响分析如图7所示。
[0104]
为了研究头部波幅对推进性能的影响,共做了四次模拟,波动幅度分别设定为0.01m,0.02m,0.03m,0.04m。其余参数保持一致,v
inlet
=0.5m/s,f=1.0hz和λ=0.95m。当头部波幅度从0.01m增长到0.02m时,准稳态游动速度明显增加。当波动幅度继续增长时,速度变化不明显,然而st却发生了显著地变化。随着头部波幅的增加,躯体的柔软性提高,尾涡的宽度也小幅增加,鱼体周围压力梯度的方向也在缓慢改变。头部波幅对水动力的影响分析如图8所示。
[0105]
步骤c、根据数值模拟的结果,基于mlp建立水动力预测模型,利用仿真数据构建数据集对预测模型进行训练和测试;
[0106]
基于mlp构建的预测模型包含一个输入层、三个隐层和一个输出层,mlp预测模型的架构如图9所示。每层包含多个神经元,所有的连接都配有权重。输入层有五个变量,输出层有四个变量。输入层仅用于获取输入变量信息并传递给隐层,不执行任何计算。输入为xi(i=0,1,2,3,4,5),x0到x4表示五个特征变量。常数1作为输入偏置,用x5表示。则
[0107][0108]
在隐层进行计算并将信息传递给输出层,且每个隐层包含的节点数不同。第一隐层包含128个节点,第二层隐层包含256个节点,第三层隐层包含256个节点。隐层网络的权值分别为w
ij
,w
jk
,w
km
。第一、二、三隐层的输出分别为zj,zk,zm。各隐层的输出分别表示如下:
[0109][0110][0111][0112]
式中,b1,b2,b3分别表示各隐层的偏置;tanh表示隐层的激活函数。输出层的4个节点表示四个输出特征变量,输出层的网络权值为w
mo
,其转置矩阵为w
om
。则输出表示为:
[0113][0114]
然后将yo与w
mo
进行矩阵相乘,输出特征变量的数据。
[0115]
训练模型的数据来自于数值模拟,每次模拟的数据量为4000。每组提供的训练数据量因模拟次数而略有差异。测试集由未被用作训练数据的模拟结果或附加仿真结果组成。将数值模拟的结果与模型预测的结果做对比,mlp和cfd预测速度结果的对比如图10所示。同时,基于数值模拟的结果和响应面方法建立二阶响应面预测模型。
[0116]
进一步地,将响应面模型与mlp模型的预测结果进行双向对比,二阶响应面预测模型表达如下:
[0117]
v=-0.156 1.006v
inlet-0.204f 0.15λ 5.125h-0.567fλ-2fh-5λh
[0118]
x=-38.853 66.106v
inlet
14.679f 36.642λ 313.25h-51.25v
inlet
λ-23.633fλ-258fh
[0119]amax
=-0.06-0.116v
inlet-0.282f 0.217λ 70.427h 0.231v
inlet
f 16.563v
inlet
h-23.125fh-64.167λh
[0120]
st=0.332-0.122λ 3.563h-1.75λh
[0121]
在入流速度为0.5m/s的条件下,采用多目标遗传算法对仿生鱼的行波参数进行优化。期望仿生鱼在1节来流下游动时,在30m内达到3到4节的准稳态游动速度。多目标优化约束条件如下所示:
[0122][0123]
式中,v表示准稳定状态下的速度,x表示开始达到准稳定状态时的位移。优化结果
如表3所示。
[0124]
表3多目标优化结果
[0125][0126]
将优化后的结果作为输入,分别采用cfd、mlp、rsm三种方法预测水动力。预测的结果及平均误差如表4所示,其中将cfd计算结果作为理论真值,误差为0。
[0127]
表4预测结果对比
[0128][0129]
三种方法的预测结果基本一致,mlp预测结果的单项误差在8%以内,平均误差为2.4%。rsm预测结果的单项误差在7%以内,平均误差为2.8%。结果表明该mlp预测模型的泛化能力强,预测的结果准确可靠。
[0130]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。