1.本发明属于图像处理领域,尤其涉及图像复原技术。
背景技术:
2.数字图像相关法(dic)是一种在实验力学领域迅速推广的全场应变应变测量技术。它是一种在通用性、易用性和计量性能之间取得了很好的平衡的光学测量方法。该光学测量方法于上世纪80年代被提出,在过去几十年众多学者对dic算法的性能、精度、稳定性等进行了改进,拓展了其应用范围和可用性。
3.2d-dic只使用单个相机,限制了它只能测量平面内的形变而不能测量复杂的外形和形变。为了克服2d-dic存在的限制,基于双目立体视觉原理的三维数字图像相关法(3d-dic)得到了发展。3d-dic可以测量复杂物体外形、应变、应变,相机测量前光轴不需要垂直测量物体表面,设备前期调整简单,环境敏感度较低。3d-dic和计算机视觉的不断融合使其得到广泛应用。
4.传统的3d-dic能够在一定程度上计算材料形变的位移场和应变场,但是其计算量巨大,很难做到实时测量。当左右图像视差较大、较小或材料发生大变形时,传统3d-dic算法容易出现无法正确计算或计算结果精度低的问题。光照等外部条件也对3d-dic的计算结果有着很大的影响。总之,计算量大、计算结果不稳定、条件要求严格等问题极大地制约了传统3d-dic技术的应用。
5.当被测物体尺寸较大时,只能调整镜头焦距或者调整相机与测量物体之间的距离,这样会减少有效像素,不能准确反映测量物体的细节,造成测量结果精度不能满足要求。在力学实验中,裂纹延展的区域一般会越来越大,且裂纹本身比较微小,因此,单独的短焦相机难以准确获取裂纹区域的信息。采用不同焦距的动态多相机系统能够获得不同尺度的材料信息,利用长焦相机跟踪裂纹区域能够获取更多的裂纹区域的细节信息。
6.基于深度学习的数字图像相关法已经被提出了,它通过将连续变化的两帧图像同时输入到卷积神经网络中,通过一系列卷积、反卷积操作,最后得到两帧图像之间的应变场。基于深度学习的三维重建也取得了较好的重建效果,但是目前还没有可行的针对三维应变场计算的深度学习模型。材料在外力作用下发生形变是一个连续的过程,并且当前时刻的形变量与过去的形变存在一定的关系。因此,相比于只对某一时刻的图像数据进行处理,结合时间序列处理更多时刻的图像数据能够获得更好的应变场预测精度。卷积lstm神经网络通过将卷积神经网络处理空间问题的能力和lstm解决时间序列问题的能力相结合,在解决时空序列预测问题上表现出强大的性能和理论优势。再进一步结合2d卷积、3d卷积来提取和细化空间特征,并利用转置卷积来补充高频细节和上采样。因此,研究一种基于深度学习的材料裂纹尖端多尺度应变场测量跟踪方法能够更好的解决传统3d-dic存在的问题。
7.申请公布号为cn112233104a,一种实时位移场和应变场检测方法、系统、装置和存储介质,涉及机器视觉技术,包括以下步骤:获取第一图像和第一配置参数;根据所述第一
配置参数对所述第一图像进行分割,得到多个第一子图;提取各所述第一子图的第一特征;获取第二图像和第二配置参数;根据所述第二配置参数对所述第二图像进行分割,得到多个第二子图;根据各所述第一子图的第一特征进行特征搜索,确定各所述第一子图的第一特征在对应的第二子图中的第二位置,根据第二位置得到各所述第一子图的第二中心坐标;根据各所述第一子图的第一中心坐标和第二中心坐标,得到应变场。本方案可以大大提升应变场的检测效率。该技术采用图像分割的的方式提高了应变场计算的效率,使得该技术能够实时运行。但是该技术仍然是属于传统的二维位移场和应变场测量范围内,针对三维上的位移无法进行准确的检测。本发明通过一系列2d、3d卷积层来提取和细化图像特征,利用转置卷积层进行上采样来计算三维应变场,并融合不同焦距的双目相机的三维应变场来得到一个裂纹区域精度更高的全局三维应变场,最后通过长焦相机结合卷积lstm神经网络对裂纹区域进行跟踪。
技术实现要素:
8.本发明旨在解决以上现有技术的问题。提出了一种基于深度学习的材料裂纹尖端多尺度应变场测量跟踪方法方法。本发明的技术方案如下:
9.一种基于深度学习的材料裂纹尖端多尺度应变场测量跟踪方法,其包括以下步骤:
10.随机在材料表面喷涂喷涂散斑,对材料施加外力作用使其发生形变并产生裂纹,使用不同焦距的相机组合来采集材料形变的多尺度信息;
11.构造多尺度材料形变图像序列作为数据集,所述的多尺度材料形变图像序列数据集包括训练集和测试集;
12.结合卷积、转置卷积、卷积lstm神经网络,建立一个通过输入多尺度材料形变的图像序列来测量材料全局三维应变场的神经网络模型;
13.利用训练集数据训练材料三维应变场测量神经网络模型;
14.利用训练后的材料三维应变场测量神经网络模型,输入相机采集到的多尺度图像,实时测量材料的三维应变场,并通过应变场计算材料的裂纹区域,然后移动双目长焦相机来实时跟踪裂纹尖端。
15.进一步的,所述随机在材料表面喷涂散斑,对材料施加外力作用使其发生形变并产生裂纹,使用不同焦距的相机组合来采集材料形变的多尺度信息,具体包括以下条件:
16.在材料表面随机均匀地喷涂散斑,散斑颜色与材料背景分别采用黑色和白色;
17.在xyz精密移动平台布置双目长焦相机和双目短焦相机来同时采集图像,其中双目长焦相机位于两个短焦相机之间;
18.所有相机采用外部触发的方式来保证图像在同一时刻被采集,相机的图像采集频率保持恒定,采集过程中相机白平衡、曝光时间保持恒定;
19.所有相机同时连续采集图像以记录材料在外力作用下的形变过程,其中双目短焦相机固定不动,用于采集材料全局图像信息,双目长焦相机利用xyz精密移动平台控制跟踪采集材料裂纹尖端微小区域以记录材料裂纹区域的细节变化。
20.进一步的,所述构造多尺度材料形变图像序列作为数据集,具体包括:
21.分别准确标定两组双目相机间的相对位置、相机成像模型,并确定材料的位置、大
小和形状;
22.计算机仿真方法通过标定获得的相机参数、位置关系数据用于建立一个仿真模型,该模型中材料表面的散斑通过现有的散斑发生器模拟、公开的图像3d-dic数据集以及实验采集获得;
23.对计算机仿真模型中的材料进行随机的三维形变并模拟裂纹的产生,根据立体成像模型计算带模拟散斑的材料在所有相机中的成像结果,在裂纹的产生过程中,移动双目长焦相机来跟踪裂纹尖端,记录裂纹延展的详细信息;
24.通过多次的模拟仿真来获取材料模型准确的三维形变应变场数据以及模型在所有相机中的投影;
25.将相机采集或仿真得到的图像数据加入一定的噪声作为原始数据,这种噪声是模拟实际线性相机的典型传感器噪声,形变产生的三维应变场作为形变过程中对应的真实结果,图像和应变场组成材料形变数据集,该数据集包括训练集和测试集。
26.进一步的,所述结合卷积、转置卷积、卷积lstm神经网络,建立一个通过输入多尺度材料形变的图像序列来测量材料全局三维应变场的神经网络模型,具体包括:
27.结合2d卷积、3d卷积、转置卷积和卷积lstm神经网络,构建一个能够同时计算材料全局和裂纹区域三维应变场,即多尺度材料三维应变场测量神经网络模型,该模型通过2d卷积层和3d卷积层来进行特征提取和细化,卷积lstm层和用于融合不同尺度的应变场的时空特征,转置卷积层用于计算三维应变场;
28.多尺度材料三维应变场测量神经网络模型有四个输入,这四个输入分别为长焦双目相机和短焦双目相机的采集到的四组图像序列,该图像序列是四个相机同步采集到的,它记录了材料在外力作用下的形变过程;
29.多尺度材料三维应变场测量神经网络模型的2d卷积层分别对长焦或者短焦的双目图像进行特征提取,并将特征提取的结果组合到一起输入3d卷积层中,然后再通过转置卷积层得到三维应变场;长焦图像序列得到的是裂纹区域三维应变场,短焦图像序列得到的全局三维应变场;
30.将两个三维应变场结果共同输入到卷积lstm层中,最后通过转置卷积层来融合两个应变场得到一个精度更高的三维应变场,该三维应变场结合了不同尺度和时间的特征信息,提供裂纹区域应变场测量结果;
31.长焦图像序列和短焦图像序列分别对应的两个三维应变场测量网络的结构相同,长焦双目相机采集到的图像包括明显的裂纹,两个网络的参数相互独立。
32.进一步的,所述利用训练集数据训练材料三维应变场测量神经网络模型,具体包括:
33.用于训练多尺度材料三维应变场测量神经网络模型的数据输入有四个,分别是长焦和短焦双目相机采集到的图像序列;
34.多尺度材料三维应变场测量神经网络的输出数据是材料形变的全局三维应变场、裂纹区域三维应变场以及融合后的三维应变场;
35.所有三维应变场的计算结果均采用均误差函数用于评估模型估计结果与真实结果之间的误差;
36.该网络模型的训练过程采用多阶段训练方法,主要分为三个训练阶段包括:三维
应变场测量网络训练阶段,三维应变场融合训练阶段以及网络微调训练阶段。
37.网络参数的训练过程是通过链式法则将总误差反向传播,利用adam梯度下降优化算法对网络进行训练:利用更新的θ进行神经网络参数优化和学习。
38.进一步的,所述所有三维应变场的计算结果均采用如下均误差函数评估模型估计结果与真实结果之间的误差,具体公式为
[0039][0040]
其中,(ue,ve,we)表示水平、竖直、深度方向的计算应变,(ug,vg,wg)表示水平、竖直、深度方向的真实应变,(i,j)表示像素坐标,k和l表示计算aee值所在的区域。
[0041]
进一步的,所述三个训练阶段分别为:
[0042]
训练阶段一:固定特征融合部分的网络参数不变,利用长焦和短焦的三维应变场误差来分别训练长焦三维应变场测量网络和短焦三维应变场测量网络;
[0043]
训练阶段二:固定长短焦三维应变场测量部分的网络参数不变,利用融合后的三维应变场误差训练特征融合部分的网络参数;
[0044]
训练阶段三:在阶段一和二的已训练的网络参数基础上继续训练网络,微调所有网络参数,得到一个更加准确的应变场测量模型,阶段三的误差error
all
由长焦网络的应变场误差error1、短焦网络的应变场误差error2以及融合后的应变场误差error3共同组成;
[0045]
error
all
=error1 error2 error3[0046]
进一步的,所述利用adam梯度下降优化算法对网络进行训练:
[0047]
首先通过计算梯度的一阶矩估计p和二阶矩估计v:
[0048][0049][0050]
其中,l是迭代次数,θ是参数矢量,e(θ)是损失函数,β1和β2分别表示一阶和二阶矩估计的梯度衰减因子;
[0051]
根据计算得到的p和v,结合学习率α,和极小偏差ε得到更新后的值θ。
[0052][0053]
利用更新的θ进行神经网络参数优化和学习,提高网络的精度。
[0054]
进一步的,所述利用训练后的材料三维应变场测量神经网络模型,输入相机采集到的多尺度图像,实时测量材料的三维应变场,并通过应变场计算材料的裂纹区域,然后移动双目长焦相机来实时跟踪裂纹尖端,具体包括:
[0055]
将采集到的图像调整为与数据集相同的格式,输入构建的多尺度材料三维应变场测量神经网络模型中;
[0056]
多尺度材料三维应变场测量神经网络模型首先计算长焦和短焦图像的三维应变场[u
0i,j
,v
0i,j
,w
0i,j
],然后通过卷积lstm和转置卷积层融合得到融合后的三维应变场[u
1i,j
,v
1i,j
,w
1i,j
];其中u、v、w分别表示水平、竖直、深度方向的应变量,i,j表示图像中的像素坐标。
[0057]
通过对应变场求导数的方式寻找出裂纹尖端的位置;
[0058]
其中和分别表示图像在x方向和y方向的一阶导数,f(x,y)表示图像在坐标(x,y)处的像素值。根据实验的实际情况,设置一个特定的阈值k,通过寻找和大于k的值对应的坐标,就能找到图像中的裂纹区域。
[0059]
根据计算的得到的裂纹尖端的位置,移动xyz精密移动平台来实时跟踪裂纹的延展,使得长焦双目相机始终能够跟随裂纹延展的方向移动;
[0060]
连续重复上面过程实时的计算材料形变过程中的三维应变场。
[0061]
本发明的优点及有益效果如下:
[0062]
本发明通过不同焦距相机组合拍摄记录材料的形变过程,构造材料形变多尺度图像数据集,结合2d卷积、3d卷积、转置卷积、卷积lstm,构建了一个能够融合不同尺度的图像信息来测量材料三维应变场的神经网络;并利用训练集的数据训练该神经网络模型;最后利用训练后的多尺度材料三维应变场测量神经网络模型对相机采集到的真实条件下的材料形变图像应变场进行计算,并通过xyz精密移动平台实时跟踪裂纹区域。本发明不仅能够准确测量材料的全局三维应变场,而且得益于卷积lstm神经网络强大的时空特征提取和处理能力,该模型相比传统3d-dic模型能够提升三维应变场计算的精度和效率。
[0063]
本发明创新点主要有:
[0064]
1、本发明通过不同焦距的相机组合来采集材料形变过程中的多尺度图像信息,能够获取到更多裂纹区域的细节信息,能够更加准确地计算裂纹区域的三维应变场。再进一步通过融合裂纹区域的三维应变场和全局三维应变场,本发明测量得到的三维应变场精度高于单一尺度计算得到的三维应变场精度。
[0065]
2、本发明通过gpu实时计算材料的全局三维应变场并找出裂纹尖端的区域,并通过xyz精密移动平台带动长焦相机跟踪裂纹尖端的位置。该方案能够处理在实验过程中裂纹迅速延展超出可视区域的情况。
[0066]
3、传统的应变场计算方法是利用数字图像相关法构建目标函数进行优化迭代求解。深度学习在数字图像领域中的应用主要集中在目标检测和图像分割,在应变场测量领域,难以获得准确的数据集限制了深度学习的应用。本发明创新性地利用深度学习的方式来实现三维应变场的计算,采用仿真的方式构建了高精度的数据集,为材料三维应变场计算提供了全新的计算思路和方法。本发明能够有效的克服传统方法无法准确计算大视差、大形变下的三维应变场的问题。
[0067]
4、本发明利用计算机模拟产生散斑和形变的方式生成用于深度学习训练的数据集,确保了数据集的准确性和精度,为训练出高精度的神经网络模型提供了可靠的数据。
[0068]
5、材料发生形变的过程其本质是空间特征随着时间的变化而变化,本发明中使用到的卷积lstm神经网络能够很好的结合时间和空间特征来提取和处理特征。本发明中用到的3d卷积层能够很好的提取深度方向的特征,在三维应变场计算中起到了重要作用。
附图说明
[0069]
图1是本发明提供优选实施例根据一示例性实施例示出的基于深度学习的材料裂
纹尖端多尺度应变场测量跟踪方法实施的流程图;
[0070]
图2是根据一示例性实施例示出的利用本发明计算三维应变场流程图;
[0071]
图3是根据一示例性实施例示出的多尺度材料形变测量系统
[0072]
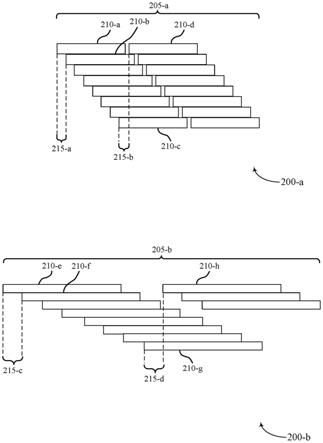
图4是根据一示例性实施例示出的一种材料发生形变的过程示意图;
[0073]
图5是根据一示例性实施例示出的一种多尺度材料三维应变场测量神经网络模型示意图;
[0074]
图6是根据一示例性实施例示出的利用本发明计算跟踪裂纹区域并计算三维应变场的方法实施流程图;
[0075]
图7是根据一示例性实施例示出的一种三维应变场的结果图。
具体实施方式
[0076]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、详细地描述。所描述的实施例仅仅是本发明的一部分实施例。
[0077]
本发明解决上述技术问题的技术方案是:
[0078]
本发明的一种基于深度学习的材料裂纹尖端多尺度应变场测量跟踪方法实施的流程图如图1所示,具体分为5个步骤:
[0079]
步骤1.在材料表面喷涂随机喷涂散斑,对材料施加外力作用使其发生形变并产生裂纹,使用不同焦距的相机组合来采集材料形变的多尺度信息。
[0080]
步骤2.构造多尺度材料形变图像序列作为数据集,所述的多尺度材料形变图像序列数据集包括训练集和测试集。
[0081]
步骤3.结合卷积、转置卷积、卷积lstm神经网络,建立一个通过输入多尺度材料形变的图像序列来测量材料全局三维应变场的神经网络模型。
[0082]
步骤4.利用训练集数据训练材料三维应变场测量神经网络模型。
[0083]
步骤5.利用训练后的材料三维应变场测量神经网络模型,输入相机采集到的多尺度图像,实时测量材料的三维应变场,并通过应变场计算材料的裂纹区域,然后移动双目长焦相机来实时跟踪裂纹尖端。
[0084]
通过该模型计算三维应变场的具体步骤的流程如图2所示。
[0085]
作为本实施例一种可能的实现方式,所述步骤1数据采集系统如图3所示,包括以下步骤:
[0086]
步骤11,在材料表面随机均匀地喷涂散斑,散斑颜色与材料背景具有较高的对比度,一般分别采用黑色和白色。
[0087]
步骤12,在xyz精密移动平台布置双目长焦相机和双目短焦相机来同时采集图像,其中双目长焦相机位于两个短焦相机之间。
[0088]
步骤13,所有相机采用外部触发的方式来保证图像在同一时刻被采集,相机的图像采集频率应保持恒定。采集过程中相机白平衡、曝光时间应保持恒定。
[0089]
步骤14,所有相机同时连续采集图像以记录材料在外力作用下的形变过程。其中双目短焦相机固定不动,用于采集材料全局图像信息,双目长焦相机利用xyz精密移动平台控制跟踪采集材料裂纹尖端微小区域以记录材料裂纹区域的细节变化。
[0090]
作为本实施例一种可能的实现方式,所述步骤2数据集生成的图像如图4所示,包
括以下步骤:
[0091]
步骤21,多尺度材料形变数据集通过计算机仿真获得。数据集制作前需要首先分别准确标定两组双目相机间的相对位置、相机成像模型,并确定材料的位置、大小和形状。
[0092]
步骤22,计算机仿真方法通过标定获得的相机参数、位置关系等数据用于建立一个仿真模型,该模型中材料表面的散斑可以通过现有的散斑发生器模拟、公开的图像3d-dic数据集以及实验采集获得。
[0093]
步骤23,对计算机仿真模型中的材料进行随机的三维形变并模拟裂纹的产生,根据立体成像模型计算带模拟散斑的材料在所有相机中的成像结果。在裂纹的产生过程中,移动双目长焦相机来跟踪裂纹尖端,记录裂纹延展的详细信息。
[0094]
步骤23,通过多次的模拟仿真来获取材料模型准确的三维形变应变场数据以及模型在所有相机中的投影。
[0095]
步骤24,将相机采集或仿真得到的图像数据加入一定的噪声作为原始数据,这种噪声是模拟实际线性相机的典型传感器噪声。形变产生的三维应变场作为形变过程中对应的真实结果。图像和应变场组成材料形变数据集,该数据集包括训练集和测试集。
[0096]
作为本实施例一种可能的实现方式,所述步骤3构建的材料三维多尺度材料三维应变场测量神经网络模型如图5所示,包括以下步骤:
[0097]
步骤31,结合2d卷积、3d卷积、转置卷积和卷积lstm神经网络,构建一个能够同时计算材料全局和裂纹区域三维应变场,并融合两个应变场得到更加精细的应变场的神经网络模型,下文中称为多尺度材料三维应变场测量神经网络模型。该模型通过2d卷积层和3d卷积层来进行特征提取和细化,卷积lstm层和用于融合不同尺度的应变场的时空特征,转置卷积层用于计算三维应变场。步骤32,多尺度材料三维应变场测量神经网络模型有四个输入,这四个输入分别为长焦双目相机和短焦双目相机的采集到的四组图像序列。该图像序列是四个相机同步采集到的,它记录了材料在外力作用下的形变过程。
[0098]
步骤33,多尺度材料三维应变场测量神经网络模型的2d卷积层分别对长焦或者短焦的双目图像进行特征提取,并将特征提取的结果组合到一起输入3d卷积层中,然后再通过转置卷积层得到三维应变场。长焦图像序列得到的是裂纹区域三维应变场,短焦图像序列得到的全局三维应变场。
[0099]
步骤34,将两个三维应变场结果共同输入到卷积lstm层中,最后通过转置卷积层来融合两个应变场得到一个精度更高的三维应变场。该三维应变场结合了不同尺度和时间的特征信息,能够提供更加高精度的应变场测量结果,特别是裂纹区域。
[0100]
步骤35,长焦图像序列和短焦图像序列分别对应的两个三维应变场测量网络的结构相同,但是由于长焦双目相机采集到的图像具有更多的细节且包括明显的裂纹,因此两个网络的参数相互独立。
[0101]
作为本实施例一种可能的实现方式,所述步骤4包括以下步骤:
[0102]
步骤41,用于训练多尺度材料三维应变场测量神经网络模型的数据输入有四个,分别是长焦和短焦双目相机采集到的图像序列,其输入数据格式均为[n,h,w,c],其中n为数据帧数,h为输入图像的高,w为输入图像的宽,c为通道数。因为输入图像为灰度图,所以c=1。
[0103]
步骤42,多尺度材料三维应变场测量神经网络的输出数据是材料形变的全局三维
应变场、裂纹区域三维应变场以及融合后的三维应变场。其数据数据格式均为[n,h,w,c],其中n为数据帧数,h为输出图像的高,w为输出图像的宽,c为通道数。因为输出的应变场为三维的,所以这里c=3。
[0104]
步骤43,所有三维应变场的计算结果均采用如下的平均误差函数用于评估模型估计结果与真实结果之间的误差。
[0105][0106]
其中,(ue,ve,we)表示水平、竖直、深度方向的计算应变,(ug,vg,wg)表示水平、竖直、深度方向的真实应变,(i,j)表示像素坐标,k和l表示计算aee值所在的区域。
[0107]
步骤44,该网络模型的训练过程采用多阶段训练方法,主要分为三个训练阶段包括:三维应变场测量网络训练阶段,三维应变场融合训练阶段以及网络微调训练阶段。
[0108]
步骤45,训练阶段一:固定特征融合部分的网络参数不变,利用长焦和短焦的三维应变场误差来分别训练长焦三维应变场测量网络和短焦三维应变场测量网络。
[0109]
训练阶段二:固定长短焦三维应变场测量部分的网络参数不变,利用融合后的三维应变场误差训练特征融合部分的网络参数。
[0110]
训练阶段三:在阶段一和二的已训练的网络参数基础上继续训练网络,微调所有网络参数,得到一个更加准确的应变场测量模型。阶段三的误差error
all
由长焦网络的应变场误差error1、短焦网络的应变场误差error2以及融合后的应变场误差error3共同组成。
[0111]
error
all
=error1 error2 error3[0112]
步骤45,网络参数的训练过程是通过链式法则将总误差反向传播,利用adam梯度下降优化算法对网络进行训练:
[0113]
首先通过计算梯度的一阶矩估计p和二阶矩估计v:
[0114][0115][0116]
其中,l是迭代次数,θ是参数矢量,e(θ)是损失函数,β1和β2分别表示一阶和二阶矩估计的梯度衰减因子。
[0117]
根据计算得到的p和v,结合学习率α,和极小偏差ε得到更新后的值θ。
[0118][0119]
利用更新的θ进行神经网络参数优化和学习,提高网络的精度。
[0120]
作为本实施例一种可能的实现方式,所述步骤5的模型实施过程以及输出结果如图5和6所示包括以下步骤:
[0121]
步骤51,将步骤2采集到的图像调整为与数据集相同的格式,输入构建的多尺度材料三维应变场测量神经网络模型中。
[0122]
步骤52,多尺度材料三维应变场测量神经网络模型会首先计算长焦和短焦图像的三维应变场,然后通过卷积lstm和转置卷积层融合得到一个更加准确的三维应变场。
[0123]
步骤53,相比于正常区域平缓的应变场变化趋势,在裂纹区域的三维应变场会表现出极大的波动。因此可以通过对应变场求导数的方式寻找出裂纹尖端的位置。
[0124]
步骤53,根据计算的得到的裂纹尖端的位置,移动xyz精密移动平台来实时跟踪裂
纹的延展,使得长焦双目相机始终能够跟随裂纹延展的方向移动。
[0125]
步骤54,连续重复上面过程可以实时的计算材料形变过程中的三维应变场,并且由于融合了多尺度的图像信息,该应变场在材料裂纹区域的计算结果更加准确。
[0126]
还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、商品或者设备中还存在另外的相同要素。
[0127]
以上这些实施例应理解为仅用于说明本发明而不用于限制本发明的保护范围。在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。