1.本发明公开了一种鱼类洄游通道确定方法及系统,属于环境保护技术领域。
背景技术:
2.鱼类洄游主要包括有生殖洄游、索铒洄游和越冬洄游,针对于终生生活在黄河中的冷水性淡水鱼类,其生殖洄游是从下游及支流上溯到河流的中上游产卵;索铒洄游发生在结束繁殖期或接近性成熟的鱼群中,鱼类通过索铒摄取和补充因生殖洄游和繁殖过程中所消耗的巨大能量,索铒洄游也可使鱼类恢复体能、增强体质,并可积蓄大量营养物以供生长、越冬和性腺再次发育;越冬洄游指的是当气温下降影响水温时,鱼类为寻求适宜水温常集结成群,从索铒的湖泊中转移至江河深处。鱼类进入越冬区后,即潜至水底或埋身淤泥中,体表被有一层粘液,暂时停止进食,很少活动,降低新陈代谢,以度过寒冷的冬季。
3.水坝横跨河道的两侧,是拦截江河渠道水流以抬高水位或调节流量的挡水建筑物。水坝的建设影响了鱼类的繁殖、索饵以及越冬等洄游行为,致使上下游的物质、能量与基因交流受到阻碍,鱼类种群数量下降。因此,人们通常通过在坝体上修建洄游通道,以降低人类开发活动对鱼类洄游的影响。
4.现有技术是通过实地观察、水下录像以及鱼类标记等手段确定鱼类洄游通道的,该方法存在效率低、通道确定不准确的技术问题。
技术实现要素:
5.本技术的目的在于,提供一种鱼类洄游通道确定方法及系统,以解决现有洄游通道确定方法存在的效率低,结果不准确的技术问题。
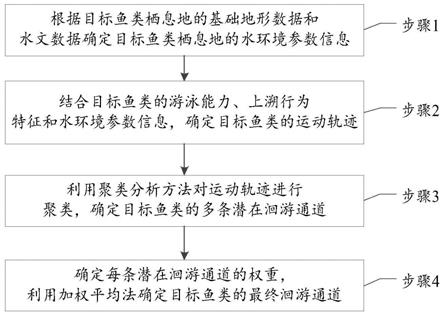
6.本发明的第一方面提供了一种鱼类洄游通道确定方法,包括:
7.根据目标鱼类栖息地的基础地形数据和水文数据确定所述目标鱼类栖息地的水环境参数信息;
8.结合目标鱼类的游泳能力、上溯行为特征和所述水环境参数信息,确定目标鱼类的运动轨迹;
9.利用聚类分析方法对所述运动轨迹进行聚类,确定目标鱼类的多条潜在洄游通道;
10.确定每条潜在洄游通道的权重,利用加权平均法确定所述目标鱼类的最终洄游通道。
11.优选地,结合目标鱼类的游泳能力、上溯行为特征和所述水环境参数信息,确定目标鱼类的运动轨迹,具体包括:
12.获取所述目标鱼类的游泳能力;
13.根据所述游泳能力,确定所述目标鱼类的上溯行为特征;
14.结合所述目标鱼类的游泳能力、上溯行为特征和所述水环境参数信息,确定目标鱼类的运动轨迹。
15.优选地,目标鱼类游泳能力的表征参数包括感应流速、临界游泳速度和突进游泳速度。
16.优选地,所述临界游泳速度根据第一公式确定,所述第一公式为:
[0017][0018]
式中,vc为所述目标鱼类的临界游泳速度,v
p
为所述目标鱼类极限疲劳的前一个水流速度,vi为相邻两次增速之间的水流增速值,tf为流速增加到极限疲劳流速后所述目标鱼类持续游泳的时间,ti为增速前后的时间间隔。
[0019]
优选地,获取所述目标鱼类的游泳能力,具体包括:
[0020]
采用封闭环形水槽对所述目标鱼类开展游泳能力测试;
[0021]
采用开放水槽对所述目标鱼类开展游泳能力测试;
[0022]
利用所述开放水槽的游泳能力测试结果修正所述封闭环形水槽的游泳能力测试结果,得到所述目标鱼类的游泳能力。
[0023]
优选地,所述聚类分析方法为层次聚类分析方法。
[0024]
优选地,确定每条潜在洄游通道的权重,具体包括:
[0025]
根据第二公式确定每条潜在洄游通道的权重,所述第二公式为:
[0026][0027]
式中,t
(
′
x,y)
为计算网格(x,y)内所述潜在洄游通道的权重,wi为计算网格(x,y)内与第i条潜在洄游通道重叠的所述运动轨迹的数量。
[0028]
优选地,利用加权平均法确定所述目标鱼类的最终洄游通道,具体包括:
[0029]
建立直角坐标系,所述计算网格位于所述直角坐标系内;
[0030]
逐一获取每一个横坐标点处,多条所述潜在洄游通道的加权平均值;
[0031]
多个所述加权平均值依次相连,得到所述目标鱼类的最终洄游通道。
[0032]
优选地,所述水环境参数信息包括水动力参数信息、水温参数信息和水质参数信息。
[0033]
本发明的第二方面提供了一种鱼类洄游通道确定系统,包括:
[0034]
参数获取模块,所述参数获取模块用于根据目标鱼类栖息地的基础地形数据和水文数据确定所述目标鱼类栖息地的水环境参数信息;
[0035]
运动轨迹确定模块,所述运动轨迹确定模块用于结合目标鱼类的游泳能力、上溯行为特征和所述水环境参数信息,确定目标鱼类的运动轨迹;
[0036]
潜在通道确定模块,所述潜在通道确定模块用于利用聚类分析方法对所述运动轨迹进行聚类,确定目标鱼类的多条潜在洄游通道;
[0037]
洄游通道确定模块,所述洄游通道确定模块用于确定每条潜在洄游通道的权重,利用加权平均法确定所述目标鱼类的最终洄游通道。
[0038]
本发明的鱼类洄游通道确定方法及系统,相较于现有技术,具有如下有益效果:
[0039]
本发明的鱼类洄游通道确定方法及系统,根据栖息地水环境的参数信息、目标鱼类的游泳能力及上溯行为特征确定了目标鱼类的运动轨迹;再结合目标鱼类的运动轨迹确
定了整群目标鱼类的洄游通道。本发明的方法及系统所考虑的影响因素全面且准确,且所确定的洄游通道是通过定量计算获得的,故可快速获得准确的鱼类洄游通道。
附图说明
[0040]
图1为本发明实施例提供的鱼类洄游通道确定方法的流程图;
[0041]
图2为本发明实施例提供的封闭环形水槽的结构示意图;
[0042]
图3为本发明实施例中代理鱼粒子的运动规则示意图;
[0043]
图4为本发明实施例中利用层次聚类法得到的目标鱼类运动轨迹的结果图;
[0044]
图5为本发明实施例提供的鱼类洄游通道确定系统的结构示意图。
[0045]
图中1为变频电极;2为外水箱;3为试验段;4为导流板;5为螺旋桨;101为参数获取模块;102为运动轨迹确定模块;103为潜在通道确定模块;104为洄游通道确定模块。
具体实施方式
[0046]
以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
[0047]
图1为本发明实施例提供的鱼类洄游通道确定方法的流程图。
[0048]
如图1所示,本发明实施例的鱼类洄游通道确定方法包括:
[0049]
步骤1、根据目标鱼类栖息地的基础地形数据和水文数据搭建三位水环境模型,确定出目标鱼类栖息地的水环境参数信息;
[0050]
具体地,根据目标鱼类栖息地的基础地形数据和水文数据在dhi mike 3三维水动力水质生态模拟软件上构建包括水动力模型、水温模型、水质模型在内的三维水环境模型,并输出水环境参数信息。
[0051]
其中,水动力模型中包括x方向水流动量方程和y方向水流动量方程:
[0052]
x方向水流动量方程如公式(1):
[0053][0054]
y方向水流动量方程如公式(2):
[0055][0056]
式中,u,v,w分别是笛卡尔坐标系中x方向,y方向,z方向上的水流速度分量;t是时间;η是水面高度;d是静水深;h=η d是总水深;f=2ωsinφ是科里奥利参数,ω是旋转角速度,φ是纬度;g是重力加速度;ρ0是水的密度;s
xx
,s
xy
,s
yx
和s
yy
是辐射应力张量的分量;v
t
是垂向涡粘系数;pa是大气压强;ρ0是水的参考密度;s是点源的流量大小,(us,vs)是源汇项水流流速,(fu,fv)为水平应力项,,用压力梯度相关来描述,简化为公式(3)和公式(4):
[0057][0058][0059]
水体与大气交界面的热交换即表面净热量通量h是影响水体温度的重要因素,本技术中的水温模型主要考虑了4种类型的热量交换形式,分别为:显热通量(对流引起的热通量)、潜热通量(蒸发引起的热量损失)、净短波辐射和净长波辐射。
[0060]
其中显热通量qc(对流引起的热通量)如公式(5):
[0061][0062]
式中,ρ
air
为空气密度(通常为1.3kg/m3);c
air
为空气比热(通常为1007j/kg℃);w
10m
为水面上方10m高处风速;t
water
为水体的绝对温度;t
air
为大气的绝对温度;cc为显热传热系数,通常为0.00141。
[0063]
其中潜热通量qv(蒸发引起的热量损失)如公式(6):
[0064]qv
=lce(a1 b1w
2m
)(q
water-q
air
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0065]
式中l为蒸发潜热(通常为2.5
×
106j/kg);ce为湿度系数(通常为0.00132);w
2m
为水面上方2米处风速;q
water
为靠近水表面的水蒸气密度;q
air
为大气中的水蒸气密度,与大气的相对湿度r成正比关系;a1和b1是道尔顿常数,分别用来调整蒸发和受风影响的蒸发,用户自定义a1和b1,用于对蒸发量进行率定。
[0066]
其中太阳短波辐射如公式(7):
[0067][0068]
式中,n为实际日照时数;nd为最大日照时数(白天时长);a2和b2是用户自定义常数,用于对短波辐射进行率定,h为实际太阳短波辐射强度,h0为绝对太阳短波辐射强度,h0如公式(8):
[0069][0070]
式中,q
sc
为日照辐射常数;e0为地球到太阳的平均距离的平方与太阳实际距离间的比值;φ为研究区域的纬度值;δ为偏向角;ω
sr
为日出方位角。上述这些参数均可由mike模型内置的相关计算公式计算得到。
[0071]
其中,净长波辐射如公式(9):
[0072][0073]
式中a、b、c、d为常数,分别为a=0.56,b=0.077,c=0.10,d=0.90;n为实际日照时数;nd为最大日照时数(白天时长);t
air
为大气温度;σ
sb
为stefan boltzman常数(5.6697
×
10-8
w/(m2·
k4));ed为测量露点温度处的蒸汽压强,ed=10e
saturated
r;其中r为大气相对湿度;esaturated为饱和蒸汽压(kpa)。
[0074]
步骤2、结合目标鱼类的游泳能力、上溯行为特征和水环境参数信息,确定目标鱼类的运动轨迹;
[0075]
步骤2.1、获取目标鱼类的游泳能力,具体包括:
[0076]
步骤2.1.1、采用封闭环形水槽对目标鱼类开展游泳能力测试;
[0077]
其中封闭环形水槽的结构如图2所示,包括变频电机1,外水箱2,试验段3,导流板4和螺旋桨5。环道设置在外水箱2里面,试验段3在环道上取平直的一段,螺旋桨5深入环道中由变频电机1驱动,推动环道内的水体运动。其中试验段3的布置要求是:在目标鱼类的栖息地中选择卵石铺在试验段上,具体方式是在试验段内设置与试验段等尺寸的铺沙板,铺沙板上铺设在栖息地中选择的卵石。
[0078]
利用上述封闭环形水槽,采用流速递增法对目标鱼类开展游泳能力测试,本发明中,目标鱼类游泳能力的表征参数包括感应流速、临界游泳速度和突进游泳速度。
[0079]
其中感应流速是指目标鱼类开始对水流产生反应的流速值,这种产生反应的标准通常是鱼类改变游动的方向。
[0080]
临界游泳速度的计算公式如公式(10):
[0081][0082]
式中,vc为所述目标鱼类的临界游泳速度,v
p
为所述目标鱼类极限疲劳的前一个水流速度,vi为相邻两次增速之间的水流增速值,tf为流速增加到极限疲劳流速后所述目标鱼类持续游泳的时间,ti为增速前后的时间间隔。
[0083]
突进游泳速度指的是是鱼类游泳的最大速度,鱼类在躲避外界刺激时,主要依靠厌氧能源进行厌氧呼吸。
[0084]
步骤2.1.2、采用开放水槽对目标鱼类开展游泳能力测试;
[0085]
采用现场开放水槽对目标鱼类开展游泳能力测试,测试可得修正系数。
[0086]
修正系数r的计算公式如公式(11):
[0087]
r=(1 εs)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0088]
式中,εs为固体阻塞影响因素,其是根据公式(12)确定的:
[0089][0090]
式中,τ是取决于开放水槽截面形状的量纲为一的常数,λ为鱼形状因子,且"λ=0.5t",其中鱼体厚度t可表示为体高和体宽的平均值;a0为鱼最大截面积且a0=0.25πhw,h是开放水槽的深度,w为系数;a
t
为开放水槽截面积。
[0091]
步骤2.1.3、利用开放水槽的游泳能力测试结果修正封闭环形水槽的游泳能力测试结果,得到目标鱼类的游泳能力,具体包括:
[0092]
在采用封闭环形水槽获得每条目标鱼类的感应速度、临界游泳速度和突进游泳速度后,再使用现场开放水槽试验获得的修正系数r修正上述三个参数,具体修正方法为利用修正系数分别乘以上述三个参数,即可得到修正后的参数。
[0093]
步骤2.2、根据游泳能力,确定目标鱼类的上溯行为特征。
[0094]
本发明以三维水环境模型为基础,在abm框架下搭建基于个体的鱼类运动模型,选取目标鱼类洄游期进行模拟,从而利用该运动模型确定目标鱼类的上溯行为特征。在该模型中,赋予代理鱼粒子(每一条目标鱼类对应一个代理鱼粒子)多重属性,包括有不同的质量、体长、初始速度、游泳能力特征值(突进游泳速度等)等,以表征同一鱼种的不同生命阶段。
[0095]
在基于个体的鱼类运动模型计算模式下,代理鱼粒子的运动可以同时受到多种环境因子的影响,其中包括基于欧拉方法下流速、水深、水温、水质浓度等因子,也包括基于拉格朗日方法下其他代理与当前/目标代理之间的相互影响。每个时间步进行代理下一时间步空间位移的如果仅取决于其喜好流速及其临近的个体位置(如逃离其最近的个体),则当前代理鱼粒子即将发生的运动速度和方向(即上溯行为特征)将是上述两个因子各自影响下的代理运动速度矢量的叠加结果。代理鱼粒子运动规则示意图见图3。
[0096]
步骤2.3、结合目标鱼类游泳能力、上溯行为特征及水环境参数信息,确定出目标鱼类的运动轨迹。
[0097]
该运动路径是由结合目标鱼类游泳能力、上溯行为特征和水环境参数信息,以三维水环境模型为基础,在abm框架下搭建基于个体的鱼类运动模型在目标鱼类洄游期进行模拟所计算得到的,为目标鱼类代理粒子在洄游过程中的路径。
[0098]
步骤3、利用聚类分析方法对运动轨迹进行聚类,确定目标鱼类的多条潜在洄游通道。
[0099]
本发明所使用的聚类分析的算法可以分为划分法、层次法、基于密度的方法、基于网格的方法、基于模型的方法等。本发明使用的为层次聚类法。
[0100]
层次聚类法是通过某种相似性测度计算节点之间的相似性,并按相似度由高到低排序,逐步重新连接节点。层次聚类使用欧式距离来计算不同类别数据点间的距离(相似度)。通过移除网络中的所有边,得到有n个孤立节点的初始状态后,计算网络中每对节点的相似度。并根据相似度从强到弱连接相应节点对,形成树状图。根据实际需求横切树状图,获得社区结构。本发明利用聚类分析方法对目标鱼类的运动轨迹进行聚类,从而确定目标鱼类的多条潜在洄游通道,得到的结果如图4所示。图4中实点代表目标鱼类,与实点连接的短线为目标鱼类的运动轨迹,三条长实线为利用层次聚类法得到的潜在洄游通道。
[0101]
步骤4、确定每条潜在洄游通道的权重,利用加权平均法确定目标鱼类的最终洄游通道,具体包括:
[0102]
步骤4.1、确定每个运动轨迹的权重,具体包括:
[0103]
根据公式(13)确定运动轨迹的权重:
[0104][0105]
式中,t
(
′
x,y)
为在研究范围的计算网格(x,y)内潜在洄游通道的权重,wi为计算网格(x,y)内与第i条潜在洄游通道重叠的运动轨迹的数量。
[0106]
具体地,图4中的九宫格中的每一格即为一个计算网格,左上角为的第一个计算网格为(1,1),其右侧为(1,2),下侧为(2,1),依次类推。
[0107]
步骤4.2、利用加权平均法确定目标鱼类的最终洄游通道,具体包括:。
[0108]
本发明中的加权平均法实际为加权迹线法,加权的对象为运动轨迹。
[0109]
步骤4.2.1、建立直角坐标系,计算网格位于直角坐标系内;本发明中以九宫格的相邻两边为横纵坐标系;
[0110]
步骤4.2.2、逐一获取每一个横坐标点处,多条潜在洄游通道的加权平均值;
[0111]
步骤4.2.3、多个加权平均值依次相连,得到目标鱼类的最终洄游通道。
[0112]
本发明得到的目标鱼类的洄游通道为目标鱼类整群的最佳洄游通道。
[0113]
本发明实施例的第二方面还公开了一种鱼类洄游通道确定系统,如图5所示,包括参数获取模块101、运动轨迹确定模块102、潜在通道确定模块103和洄游通道确定模块104;
[0114]
其中参数获取模块101用于根据目标鱼类栖息地的基础地形数据和水文数据确定目标鱼类栖息地的水环境参数信息;
[0115]
运动轨迹确定模块102用于结合目标鱼类的游泳能力、上溯行为特征和水环境参数信息,确定目标鱼类的运动轨迹;
[0116]
潜在通道确定模块103用于利用聚类分析方法对运动轨迹进行聚类,确定目标鱼类的多条潜在洄游通道;
[0117]
洄游通道确定模块104用于确定每条潜在洄游通道的权重,利用加权平均法确定目标鱼类的最终洄游通道。
[0118]
本发明的鱼类洄游通道确定方法及系统,根据栖息地水环境的参数信息、目标鱼类的游泳能力及上溯行为特征确定了目标鱼类的运动轨迹;再结合目标鱼类的运动轨迹确定了整群目标鱼类的洄游通道。本发明的方法及系统所考虑的影响因素全面且准确,且所确定的洄游通道是通过定量计算获得的,故可快速获得准确的鱼类洄游通道。
[0119]
以上所述,仅是本技术的几个实施例,并非对本技术做任何形式的限制,虽然本技术以较佳实施例揭示如上,然而并非用以限制本技术,任何熟悉本专业的技术人员,在不脱离本技术技术方案的范围内,利用上述揭示的技术内容做出些许的变动或修饰均等同于等效实施案例,均属于技术方案范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。