1.本发明涉及影像领域,尤其涉及一种基于医院放射科的影像存储传输一体系统。
背景技术:
2.近年来,医学影像设备和技术进展相当迅速,64层的多排ct和3.0t的磁共振均已应用于临床,成像速度和图像分辨率有了更多的提高。各种功能成像技术也发展很快,使得医学影像学和各临床学科的结合更为紧密,其应用也更为广泛。通过胶片打印图像进行阅片和会诊讨论的情况,会逐渐被取代,特别是随着数字化影像和pacs的发展,可通过显示器和网络直接阅读图像进行阅片和会诊讨论等,其应用也在逐渐增多。数字化医学影像实现了医院放射科办公信息化,其作为最常用的医学影像载体。为了方便对患者进行病情跟踪,以及为医疗纠纷、事故鉴定提供直接依据,医院影像科会保存患者的病历资料和影像信息,方便随时打印。但医院数据流量大,保存庞大的数据是一件十分困难的事情,且从庞大的数据中获取患者最核心的病灶也越加繁杂,因此如何解决既能保存患者影像又能解决医院数据量处理的压力成为现阶段亟待解决的问题。
技术实现要素:
3.为此,本发明提供一种基于医院放射科的影像存储传输一体系统,可以解决无法根据当前影像与储存影像识别病灶并对影像进行保存,以减少储存压力的技术问题。
4.为实现上述目的,本发明提供一种基于医院放射科的影像存储传输一体系统,包括:
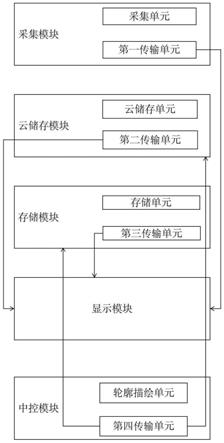
5.采集模块,其用于获取医院放射科的采集的影像,并将采集的影像发送至云端储存模块,其包括用于采集影像的采集单元以及用于将采集的影像传输至中控模块的第一传输单元;
6.云储存模块,其用于储存医院放射科采集的图像,其包括云储存模块包括云储存单元以及用于将影像向显示模块传输的第二传输单元,其中,云储存单元包括若干用户数据库,所述数据库用于储存各用户的影像;
7.存储模块,用于存储用户病灶影像,其包括存储单元以及用于传输病灶影像的第三传输单元,所述存储单元包括若干用户病灶数据库,所述用户数据库包括若干病灶数据组;
8.所述显示模块,其用于显示所述云储存单元储存的影像和所述存储模块储存的病灶影像;
9.所述中控模块,其包括轮廓描绘单元以及用于传输影像的第四传输单元,所述轮廓描绘单元用于将采集单元获取的影像的轮廓进行描绘;所述中控模块根据轮廓描绘单元获取的当前影像轮廓,并将其与云储存模块中存储的当前用户影像轮廓进行一一比对,获取当前影像轮廓与当前用户影像轮廓关联度,中控单元选取关联度最大值对应的存储的当前用户影像为参照影像,所述中控模块获取对当前影像与参照影像关联度,中控模块根据
所述相似度分析单元获取的相似度大于预设值,中控模块判定将当前影像保存至云储存模块,中控模块获取相似度小于预设值,中控模块对当前影像和参照影像进行区域划分,并获取当前影像和参照影像各区域差异度,中控模块将分别对当前影像和参照影像各区域差异度与预设值相比较,判定当前影像的病灶位置,中控模块获取当前影像和参照影像的差异度大于预设值,中控模块判定对当前影像和参照影像各区域影响轮廓斜率进行比较,以获取当前影像病灶位置,并将当前影像病灶位置保存至存储模块当前用户新增的病灶数据组,中控模块获取当前影像和参照影像的差异度小于预设值,中控模块判定以参照影像病灶位置为当前影像的病灶位置,并将该病灶位置的影像发送至所述存储模块中当前用户数据库。
10.进一步地,所述中控模块将当前影像轮廓与所述云储存单元储存当前用户影像轮廓进行一一比对,中控模块获取当前影像轮廓与云储存单元储存当前用户影像轮廓关联度,a1、a2
···
an,其中,a1为当期影像轮廓与云储存单元储存当前用户第一影像轮廓关联度,a2为当期影像轮廓与云储存单元储存当前用户第二影像轮廓关联度
···
an为当期影像轮廓与云储存单元储存当前用户第n影像轮廓关联度,中控模块选取关联度最大值对应的云储存单元储存的当前用于第i影像为参照影像。
11.进一步地,所述中控模块预设关联度b,中控模块根据当前影像与参照影像轮廓关联度b与预设关联度相比较,判定是否将当前影像轮廓保存至云储存模块中,其中,
12.当b≤b1,所述中控模块选取第一预设单位面积s1为区域划分单位面积,对当前影像进行进一步分析;
13.当b1<b<b2,所述中控模块选取第二预设单位面积s2为区域划分单位面积,对当前影像进行进一步分析;
14.当b2≤b<b3,所述中控模块选取第三预设单位面积s3为区域划分单位面积,对当前影像进行进一步分析;
15.当b≥b3,所述中控模块判定将当前影像保存至云储存模块当前用户数据库中;
16.其中,所述中控模块预设关联度b,设定第一预设关联度b1、第二预设关联度b2、第三预设关联度b3,中控模块预设单位面积s,设定第一预设单位面积s1、第二预设单位面积s2、第三预设单位面积s3。
17.进一步地,所述中控模块以区域划分面积si对当前影像和参照影像的轮廓进行区域划分,所述中控模块获取当前影像和参照影像的差异度d,设定d=|(k11-k21)/(k11
×
k21)
×
(k12-k22)/(k12
×
k22)
×
···
×
(k1m-k2m)/(k12
×
k22)|,其中,k11为当前影像第一区域轮廓斜率,k12为当前影像第二区域轮廓斜率,
···
k1m为当前影像第m区域轮廓斜率,k21为参照影像第一区域轮廓斜率,k22为参照影像第二区域轮廓斜率
···
k2m为参照影像第m区域轮廓斜率。
18.进一步地,所述中控模块预设差异度d,中控模块将获取当前影像和参照影像的差异度d与预设值相比较,判定当前影像的病灶位置,其中,
19.当d≤d1,所述中控模块判定以参照影像病灶位置为当前影像的病灶位置,并将该病灶位置的影像发送至所述存储模块中当前用户数据库;
20.当d1<d<d2,所述中控模块将选取的区域划分单位面积si缩小至si1,并对当前影像和参照影像的关联度进行重新获取;
21.当d≥d2,所述中控模块根据当前影像与参照影像的各区域轮廓斜率相比较,判定当前影像的病灶位置;
22.其中,所述中控模块预设差异度d,设定第一预设差异度d1、第二预设差异度d2。
23.进一步地,所述中控模块获取当前影像和参照影像的差异度在第一预设差异度和第二预设差异度之间,中控模块将选取的区域划分单位面积si缩小至si1,设定si1=si
×
(1-(d2-d)
×
(d-d1)/(d1
×
d2))。
24.进一步地,所述中控模块获取当前影像和参照影像的差异度大于等于第二预设差异度,中控模块依次对当前影像和参照影像的各区域轮廓斜率差值与预设值进行比较,其中,所述中控模块获取第j区域当前影像轮廓斜率k1j与参照影像的轮廓斜率k2j差值与预设值相比较,判定当前影像的病灶位置,设定,
25.当k1j-k2j≤
△
k1,所述中控模块判定当前影像第j区域不是当前影像病灶位置;
26.当
△
k1<k1j-k2j<
△
k2,所述中控模块将当前区域划分单位面积s’提高至s’1;
27.当k1j-k2j≥
△
k2,所述中控模块判定当前影像第j区域为当前影像病灶位置,并将当前影像病灶位置保存至存储模块当前用户新增的病灶数据组;
28.其中,所述中控模块预设斜率差值
△
k,设定第一预设斜率差值
△
k1,第二预设斜率差值
△
k2。
29.进一步地,所述中控模块获取的当前影像和参照影像的第j区域轮廓斜率差值在第一预设斜率差值和第二预设斜率差值之间,中控模块将当前区域划分s’提高至s’1,设定s’1=s
’×
(1 (k1j-k2j
‑△
k1)
×
(
△
k1-k1j-k2j)/(
△
k1
×△
k2))。
30.进一步地,所述中控模块根据各区域当前影像轮廓斜率获取当前影像斜率均匀度w,设定w=((k11-k10)2 (k12-k10)2
···
(k1m-k10)2)/m。
31.进一步地,所述中控模块预设单位面积长的尺寸g,设定第一预设单位面积长的尺寸g1,第二预设单位面积长的尺寸g2,第二预设单位面积长的尺寸g3,中控模块预设单位面积宽的尺寸p,设定第一预设单位面积宽的尺寸p1,第二预设单位面积宽的尺寸p2,第三预设单位面积宽的尺寸p3,中控模块获取区域划分单位面积si,中控模块选取第i预设单位面积长的尺寸gi,选取第i预设单位面积宽的尺寸pi,中控单元将当前区域划分单位面积sd与预设区域划分单位面积相比较,对选取的单位面积宽的尺寸和长的尺寸进行调节,其中,
32.当sd≤si,所述中控模块判定对选取的单位面积宽的尺寸pi和选取的单位面积长的尺寸进行调节,其中,当w≤w0,中控模块将选取的单位面积宽的尺寸pi降低至pi1,设定pi1=pi
×
sd/si,当w>w0,中控模块将选取的单位面积宽的尺寸pi降低至pi2,设定pi2=pi
×
sd/si
×
(1-(w-w0)/w0)
×
pj2,将选取的单位面积长的尺寸gi降低至gi1,设定gi1=gi
×
sd/si
×
(1-(w-w0)/w0)
×
pj1;
33.当sd>si,所述中控模块判定对选取的单位面积宽的尺寸pi和选取的单位面积长的尺寸进行调节,其中,当w≤w0,中控模块将选取的单位面积长的尺寸gi提高至gi2,设定gi2=gi
×
sd/si,当w>w0,中控模块将选取的单位面积宽的尺寸pi提高至pi3,设定pi3=pi
×
sd/si
×
(1 (w-w0)/w0)
×
pj2,将选取的单位面积长的尺寸gi提高至gi3,设定gi3=gi
×
sd/si
×
(1 (w-w0)/w0)
×
pj1;
34.其中,所述中控模块预设尺寸补偿系数pj,设定第一预设尺寸补偿系数pj1,第二预设尺寸补偿系数pj2,w0为均匀度标准参数。
35.与现有技术相比,本发明的有益效果在于,所述中控模块根据轮廓描绘单元获取的当前影像轮廓,并将其与云储存模块中存储的当前用户影像的轮廓进行一一比对,获取当前影像轮廓与当前用户影像轮廓关联度,中控单元选取关联度最大值对应的存储的当前用户影像为参照影像,所述中控模块获取对当前影像与参照影像关联度,中控模块根据所述相似度分析单元获取的相似度大于预设值,中控模块判定将当前影像保存至云储存模块,中控模块获取相似度小于预设值,中控模块对当前影像和参照影像进行区域划分,并获取当前影像和参照影像各区域差异度,中控模块将分别对当前影像和参照影像各区域差异度与预设值相比较,判定当前影像的病灶位置,中控模块获取当前影像和参照影像的差异度大于预设值,中控模块判定对当前影像和参照影像各区域影响轮廓斜率进行比较,以获取当前影像病灶位置,并将当前影像病灶位置保存至存储模块当前用户新增的病灶数据组,中控模块获取当前影像和参照影像的差异度小于预设值,中控模块判定以参照影像病灶位置为当前影像的病灶位置,并将该病灶位置的影像发送至所述存储模块中当前用户数据库。
36.尤其,本发明设置将当前图像与云储存模块中云储存单元储存的当前用户影像轮廓进行一一对比,并获取当前影像与对比影像轮廓的关联度,并将获取的所有关联度中最大值对应的影像设为当前影像的参照影像,用于进一步评价当前影像的采集位置和病灶位置。
37.尤其,本发明中控模块将设置的关联度划分为明确的三个标准,通过获取的当前影像与参照影像轮廓关联度与预设关联度相比较,对当前影像进行分析,其中,若中控模块获取的轮廓关联度小于等于第一预设关联度,说明当前影像与参照影像关联度很小,中控模块判定对当前影像进行进一步分析,并选取较小的单位面积对当前影像和参照影像进行区域划分,若中控模块获取的轮廓关联度在第一预设关联度和第二预设关联度之间,说明当前影像与参照影像关联度不大,中控模块判定对当前影像进行进一步分析,并选取第二预设即中间值的单位面积对当前影像和参照影像进行进一步划分,中控模块获取的轮廓关联度在第二预设关联度和第三预设关联度之间,说明当前影像与参照影像关联度较大,中控模块判定对当前影像进行进一步分析,并选取较大的单位面积对当前影像和参照影像进行进一步划分,中控模块获取的轮廓关联度大于等于第三预设关联度,说明当前影像与参照影像关联度很大,中控模块判定将当前影像保存至云储存模块,不需要获取病灶位置,以减小存储模块的存储压力,同时将其保存于云端,利于当前影像的保存及后续查找。
38.尤其,本发明设置根据当前影像和参照影像各区域斜率值获取当前影像和参照影像的差异度,用以评价每个区域当前影像与参照影像的区别程度,中控模块将获取的差异度与预设差异度相比较,判定当前影像的病灶位置,若获取的差异度小于等于第一预设差异度,说明当前影像与参照影像并没有太大的区别,中控模块判定以参照影像病灶位置为当前影像的病灶位置,并将当前影像病灶位置的影像发送至所述存储模块中当前用户数据库,方便存储模块存储及传输,同时中控模块将当前影像发送至云储存模块予以保存,中控模块获取的差异度在第一预设差异度和第二预设差异度之间,说明当前影像与参照影像差异度较大,造成其差异度较大的原因在于选取的区域划分单位面积不准确,导致获取的差异度无法判定当前影像病灶位置,因此中控模块缩小区域划分单位面积,以准确的获取差异度,进而判定当前影像病灶位置,中控模块获取的差异度大于等于第二预设差异度,说明
当前影像与参照影像差异度较大,中控模块根据当前影像和参照影像各区域轮廓斜率进行比较,进一步判定当前影像病灶的位置。
39.尤其,本发明中控模块获取当前影像和参照影像的差异度大于等于第二预设差异度,中控模块依次对当前影像和参照影像的各区域轮廓斜率差值与预设的两个标准值进行比较,以判定各区域当前影像和参照影像轮廓的差异程度,若差异程度高,则说明当前区域为当前影像的病灶位置,若中控模块获取当前区域当前影像与参照影像轮廓斜率差值与预设值相比较,若当前区域当前影像与参照影像轮廓斜率差值小于等于第一预设斜率差值,说明当前影像该区域与参照影像该区域没有太大差异,该区域不是当前影像病灶,若当前区域当前影像与参照影像轮廓斜率差值在第一预设斜率差值和第二预设斜率差值之间,说明当前影像该区域与参照影像该区域有较大差异,中控模块通过扩大区域划分单位面积,以提高病灶位置获取的范围,若当前区域当前影像与参照影像轮廓斜率差值大于等于第二预设斜率差值,说明当前影像该区域与参照影像该区域有很大差异,该区域为当前影像病灶位置,中控模块将当前影像病灶位置保存至存储模块当前用户新增的病灶数据组,同时将当前影像发送至云储存模块进行储存。
40.尤其,本发明将调节后的区域划分单位面积与预设区域划分单位面积相比较,对选取的单位面积长和宽进行调节,其中,若调节后的区域划分单位面积小于等于选取的区域划分单位面积,说明减小区域划分单位面积,中控模块根据当前影像斜率均匀度与预设均匀度标准值相比较,判定调节方式,其中,若中控模块获取的当前影像斜率均匀度小于等于均匀度标准值,说明当前影像轮廓较为平滑,并无太大的波动,中控模块将只对单位面积宽的尺寸进行降低,实现调节,若中控工模块获取的当前影像斜率均匀度大于预设均匀度标准值,说明当前影像各区域轮廓波动较大,中控模块对单位面积的长和宽进行调节,以满足对区域划分单位面积调节的同时,进一步地准确获取各区域的轮廓斜率,若调节后的区域划分单位面积大于选取的区域划分单位面积,说明需增加区域划分单位面积,中控模块根据当前影像斜率均匀度与预设均匀度标准值相比较,判定调节方式,若中控模块获取的当前影像斜率均匀度小于等于均匀度标准值,说明当前影像轮廓较为平滑,并无太大的波动,中控模块将只对单位面积长的尺寸进行增加,实现调节,若中控工模块获取的当前影像斜率均匀度大于预设均匀度标准值,说明当前影像各区域轮廓波动较大,中控模块对单位面积的长和宽进行调节,以满足对区域划分单位面积调节的同时,进一步地准确获取各区域的轮廓斜率。
附图说明
41.图1为发明实施例基于医院放射科的影像存储传输一体系统结构示意图;
42.图2为发明实施例云储存单元结构示意图;
43.图3为发明实施例存储单元结构示意图。
具体实施方式
44.为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
45.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这
些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
46.需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
47.此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
48.请参阅图1所示,基于医院放射科的影像存储传输一体系统结构示意图,包括,
49.采集模块,其用于获取医院放射科的采集的影像,并将采集的影像发送至云端储存模块,其包括用于采集影像的采集单元以及用于将采集的影像传输至中控模块的第一传输单元;
50.请参阅图2所示,其为本发明实施例云储存单元结构示意图,云储存模块,其用于储存医院放射科采集的图像,其包括云储存模块包括云储存单元以及用于将影像向显示模块传输的第二传输单元,其中,云储存单元包括若干用户数据库,所述数据库用于储存各用户的影像;
51.请参阅图3所示,其为本发明实施例存储单元结构示意图,存储模块,用于存储用户病灶影像,其包括存储单元以及用于传输病灶影像的第三传输单元,所述存储单元包括若干用户病灶数据库,所述用户数据库包括若干病灶数据组;
52.所述显示模块,其用于显示所述云储存单元储存的影像和所述存储模块储存的病灶影像;
53.所述中控模块,其包括轮廓描绘单元以及用于传输影像的第四传输单元,所述轮廓描绘单元用于将采集单元获取的影像的轮廓进行描绘;所述中控模块根据轮廓描绘单元获取的当前影像轮廓,并将其与云储存模块中存储的当前用户影像的轮廓进行一一比对,获取当前影像轮廓与当前用户影像轮廓关联度,中控单元选取关联度最大值对应的存储的当前用户影像为参照影像,所述中控模块获取对当前影像与参照影像关联度,中控模块根据所述相似度分析单元获取的相似度大于预设值,中控模块判定将当前影像保存至云储存模块,中控模块获取相似度小于预设值,中控模块对当前影像和参照影像进行区域划分,并获取当前影像和参照影像各区域差异度,中控模块将分别对当前影像和参照影像各区域差异度与预设值相比较,判定当前影像的病灶位置,中控模块获取当前影像和参照影像的差异度大于预设值,中控模块判定对当前影像和参照影像各区域影响轮廓斜率进行比较,以获取当前影像病灶位置,并将当前影像病灶位置保存至存储模块当前用户新增的病灶数据组,中控模块获取当前影像和参照影像的差异度小于预设值,中控模块判定以参照影像病灶位置为当前影像的病灶位置,并将该病灶位置的影像发送至所述存储模块中当前用户数据库。
54.所述中控模块将当前影像轮廓与所述云储存单元储存当前用户影像轮廓进行一一比对,中控模块获取当前影像轮廓与云储存单元储存当前用户影像轮廓关联度,a1、
a2
···
an,其中,a1为当期影像轮廓与云储存单元储存当前用户第一影像轮廓关联度,a2为当期影像轮廓与云储存单元储存当前用户第二影像轮廓关联度
···
an为当期影像轮廓与云储存单元储存当前用户第n影像轮廓关联度,中控模块选取关联度最大值对应的云储存单元储存的当前用于第i影像为参照影像,其中,i=1,2
···
n,n为大于等于2的自然数。
55.具体而言,本发明实施例不对当前影像轮廓和云储存单元储存的当前用户影像轮廓关联度获取方式进行限定,其只要能够对当前影像轮廓和储存的影像的相似程度进行评价即可,本发明实施例可采用欧式距离法、余弦距离法或特征点向量法对影像进行关联度获取,本发明实施例中当前影像与其他影像的关联度实际上可以理解为当前影像与比对的影像相似度。
56.尤其,本发明设置将当前图像与云储存模块中云储存单元储存的当前用户影像轮廓进行一一对比,并获取当前影像与对比影像轮廓的关联度,并将获取的所有关联度中最大值对应的影像设为当前影像的参照影像,用于进一步评价当前影像的采集位置和病灶位置。
57.所述中控模块预设关联度b,中控模块根据当前影像与参照影像轮廓关联度b与预设关联度相比较,判定是否将当前影像轮廓保存至云储存模块中,其中,
58.当b≤b1,所述中控模块选取第一预设单位面积s1为区域划分单位面积,对当前影像进行进一步分析;
59.当b1<b<b2,所述中控模块选取第二预设单位面积s2为区域划分单位面积,对当前影像进行进一步分析;
60.当b2≤b<b3,所述中控模块选取第三预设单位面积s3为区域划分单位面积,对当前影像进行进一步分析;
61.当b≥b3,所述中控模块判定将当前影像保存至云储存模块当前用户数据库中;
62.其中,所述中控模块预设关联度b,设定第一预设关联度b1、第二预设关联度b2、第三预设关联度b3,中控模块预设单位面积s,设定第一预设单位面积s1、第二预设单位面积s2、第三预设单位面积s3。
63.尤其,本发明中控模块将设置的关联度划分为明确的三个标准,通过获取的当前影像与参照影像轮廓关联度与预设关联度相比较,对当前影像进行分析,其中,若中控模块获取的轮廓关联度小于等于第一预设关联度,说明当前影像与参照影像关联度很小,中控模块判定对当前影像进行进一步分析,并选取较小的单位面积对当前影像和参照影像进行区域划分,若中控模块获取的轮廓关联度在第一预设关联度和第二预设关联度之间,说明当前影像与参照影像关联度不大,中控模块判定对当前影像进行进一步分析,并选取第二预设即中间值的单位面积对当前影像和参照影像进行进一步划分,中控模块获取的轮廓关联度在第二预设关联度和第三预设关联度之间,说明当前影像与参照影像关联度较大,中控模块判定对当前影像进行进一步分析,并选取较大的单位面积对当前影像和参照影像进行进一步划分,中控模块获取的轮廓关联度大于等于第三预设关联度,说明当前影像与参照影像关联度很大,中控模块判定将当前影像保存至云储存模块,不需要获取病灶位置,以减小存储模块的存储压力,同时将其保存于云端,利于当前影像的保存及后续查找。
64.所述中控模块以区域划分面积si对当前影像和参照影像的轮廓进行区域划分,所
述中控模块获取当前影像和参照影像的差异度d,设定d=|(k11-k21)/(k11
×
k21)
×
(k12-k22)/(k12
×
k22)
×
···
×
(k1m-k2m)/(k12
×
k22)|,其中,k11为当前影像第一区域轮廓斜率,k12为当前影像第二区域轮廓斜率,
···
k1m为当前影像第m区域轮廓斜率,k21为参照影像第一区域轮廓斜率,k22为参照影像第二区域轮廓斜率
···
k2m为参照影像第m区域轮廓斜率。
65.具体而言,本发明实施例中轮廓斜率为通过各区域轮廓终点和起点组成的线段获取,本发明实施例提供一种优选的实施方案,以各区域左下角为原点,以各区域长为x轴,以各区域的宽为y轴建立平面直角坐标系,影像轮廓起点坐标(x1,y1),影像轮廓终点坐标(x2,y2),影像轮廓k,设定k=(y2-y1)/(x2-x1),其中,各区域的起点和终点为影像连贯的点,即,起点为x轴较原点较近的点,终点为x轴较原点较远的点。更进一步的,本发明实施例中第一区域、第二区域至第m区域的顺序统一为行或列,即第一行第一列区域为第一区域,第一行第二列为第二区域,第一行第二列为第三区域,第二行第一列为四地区域等。
66.所述中控模块预设差异度d,中控模块将获取当前影像和参照影像的差异度d与预设值相比较,判定当前影像的病灶位置,其中,
67.当d≤d1,所述中控模块判定以参照影像病灶位置为当前影像的病灶位置,并将该病灶位置的影像发送至所述存储模块中当前用户数据库;
68.当d1<d<d2,所述中控模块将选取的区域划分单位面积si缩小至si1,并对当前影像和参照影像的关联度进行重新获取;
69.当d≥d2,所述中控模块根据当前影像与参照影像的各区域轮廓斜率相比较,判定当前影像的病灶位置;
70.其中,所述中控模块预设差异度d,设定第一预设差异度d1、第二预设差异度d2。
71.尤其,本发明设置根据当前影像和参照影像各区域斜率值获取当前影像和参照影像的差异度,用以评价每个区域当前影像与参照影像的区别程度,中控模块将获取的差异度与预设差异度相比较,判定当前影像的病灶位置,若获取的差异度小于等于第一预设差异度,说明当前影像与参照影像并没有太大的区别,中控模块判定以参照影像病灶位置为当前影像的病灶位置,并将当前影像病灶位置的影像发送至所述存储模块中当前用户数据库,方便存储模块存储及传输,同时中控模块将当前影像发送至云储存模块予以保存,中控模块获取的差异度在第一预设差异度和第二预设差异度之间,说明当前影像与参照影像差异度较大,造成其差异度较大的原因在于选取的区域划分单位面积不准确,导致获取的差异度无法判定当前影像病灶位置,因此中控模块缩小区域划分单位面积,以准确的获取差异度,进而判定当前影像病灶位置,中控模块获取的差异度大于等于第二预设差异度,说明当前影像与参照影像差异度较大,中控模块根据当前影像和参照影像各区域轮廓斜率进行比较,进一步判定当前影像病灶的位置。
72.所述中控模块获取当前影像和参照影像的差异度在第一预设差异度和第二预设差异度之间,中控模块将选取的区域划分单位面积si缩小至si1,设定si1=si
×
(1-(d2-d)
×
(d-d1)/(d1
×
d2))。
73.所述中控模块获取当前影像和参照影像的差异度大于等于第二预设差异度,中控模块依次对当前影像和参照影像的各区域轮廓斜率差值与预设值进行比较,其中,所述中控模块获取第j区域当前影像轮廓斜率k1j与参照影像的轮廓斜率k2j差值与预设值相比
较,判定当前影像的病灶位置,设定,
74.当k1j-k2j≤
△
k1,所述中控模块判定当前影像第j区域不是当前影像病灶位置;
75.当
△
k1<k1j-k2j<
△
k2,所述中控模块将当前区域划分单位面积s’提高至s’1;
76.当k1j-k2j≥
△
k2,所述中控模块判定当前影像第j区域为当前影像病灶位置,并将当前影像病灶位置保存至存储模块当前用户新增的病灶数据组;
77.其中,所述中控模块预设斜率差值
△
k,设定第一预设斜率差值
△
k1,第二预设斜率差值
△
k2。
78.所述中控模块获取的当前影像和参照影像的第j区域轮廓斜率差值在第一预设斜率差值和第二预设斜率差值之间,中控模块将当前区域划分s’提高至s’1,设定s’1=s
’×
(1 (k1j-k2j
‑△
k1)
×
(
△
k1-k1j-k2j)/(
△
k1
×△
k2))。
79.尤其,本发明中控模块获取当前影像和参照影像的差异度大于等于第二预设差异度,中控模块依次对当前影像和参照影像的各区域轮廓斜率差值与预设的两个标准值进行比较,以判定各区域当前影像和参照影像轮廓的差异程度,若差异程度高,则说明当前区域为当前影像的病灶位置,若中控模块获取当前区域当前影像与参照影像轮廓斜率差值与预设值相比较,若当前区域当前影像与参照影像轮廓斜率差值小于等于第一预设斜率差值,说明当前影像该区域与参照影像该区域没有太大差异,该区域不是当前影像病灶,若当前区域当前影像与参照影像轮廓斜率差值在第一预设斜率差值和第二预设斜率差值之间,说明当前影像该区域与参照影像该区域有较大差异,中控模块通过扩大区域划分单位面积,以提高病灶位置获取的范围,若当前区域当前影像与参照影像轮廓斜率差值大于等于第二预设斜率差值,说明当前影像该区域与参照影像该区域有很大差异,该区域为当前影像病灶位置,中控模块将当前影像病灶位置保存至存储模块当前用户新增的病灶数据组,同时将当前影像发送至云储存模块进行储存。
80.所述中控模块根据各区域当前影像轮廓斜率获取当前影像斜率均匀度w,设定w=((k11-k10)2 (k12-k10)2
···
(k1m-k10)2)/m。
81.所述中控模块预设单位面积长的尺寸g,设定第一预设单位面积长的尺寸g1,第二预设单位面积长的尺寸g2,第二预设单位面积长的尺寸g3,中控模块预设单位面积宽的尺寸p,设定第一预设单位面积宽的尺寸p1,第二预设单位面积宽的尺寸p2,第三预设单位面积宽的尺寸p3,中控模块获取区域划分单位面积si,中控模块选取第i预设单位面积长的尺寸gi,选取第i预设单位面积宽的尺寸pi,中控单元将当前区域划分单位面积sd与预设区域划分单位面积相比较,对选取的单位面积宽的尺寸和长的尺寸进行调节,其中,
82.当sd≤si,所述中控模块判定对选取的单位面积宽的尺寸pi和选取的单位面积长的尺寸进行调节,其中,当w≤w0,中控模块将选取的单位面积宽的尺寸pi降低至pi1,设定pi1=pi
×
sd/si,当w>w0,中控模块将选取的单位面积宽的尺寸pi降低至pi2,设定pi2=pi
×
sd/si
×
(1-(w-w0)/w0)
×
pj2,将选取的单位面积长的尺寸gi降低至gi1,设定gi1=gi
×
sd/si
×
(1-(w-w0)/w0)
×
pj1;
83.当sd>si,所述中控模块判定对选取的单位面积宽的尺寸pi和选取的单位面积长的尺寸进行调节,其中,当w≤w0,中控模块将选取的单位面积长的尺寸gi提高至gi2,设定gi2=gi
×
sd/si,当w>w0,中控模块将选取的单位面积宽的尺寸pi提高至pi3,设定pi3=pi
×
sd/si
×
(1 (w-w0)/w0)
×
pj2,将选取的单位面积长的尺寸gi提高至gi3,设定gi3=gi
×
sd/si
×
(1 (w-w0)/w0)
×
pj1;
84.其中,所述中控模块预设尺寸补偿系数pj,设定第一预设尺寸补偿系数pj1,第二预设尺寸补偿系数pj2,w0为均匀度标准参数。
85.具体而言,本发明实施例不对尺寸补偿系数进行限定,只要其能够实现单位面积长和宽尺寸的调节即可,本发明实施例提供一种优选的实施方案,其中,第一预设补偿系数pj1为0.3-0.6,第二预设补偿系数pj2为0.4-0.6。
86.尤其,本发明将调节后的区域划分单位面积与预设区域划分单位面积相比较,对选取的单位面积长和宽进行调节,其中,若调节后的区域划分单位面积小于等于选取的区域划分单位面积,说明减小区域划分单位面积,中控模块根据当前影像斜率均匀度与预设均匀度标准值相比较,判定调节方式,其中,若中控模块获取的当前影像斜率均匀度小于等于均匀度标准值,说明当前影像轮廓较为平滑,并无太大的波动,中控模块将只对单位面积宽的尺寸进行降低,实现调节,若中控工模块获取的当前影像斜率均匀度大于预设均匀度标准值,说明当前影像各区域轮廓波动较大,中控模块对单位面积的长和宽进行调节,以满足对区域划分单位面积调节的同时,进一步地准确获取各区域的轮廓斜率,若调节后的区域划分单位面积大于选取的区域划分单位面积,说明需增加区域划分单位面积,中控模块根据当前影像斜率均匀度与预设均匀度标准值相比较,判定调节方式,若中控模块获取的当前影像斜率均匀度小于等于均匀度标准值,说明当前影像轮廓较为平滑,并无太大的波动,中控模块将只对单位面积长的尺寸进行增加,实现调节,若中控工模块获取的当前影像斜率均匀度大于预设均匀度标准值,说明当前影像各区域轮廓波动较大,中控模块对单位面积的长和宽进行调节,以满足对区域划分单位面积调节的同时,进一步地准确获取各区域的轮廓斜率。
87.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。