基于mppt的pemfc混合动力的能量控制方法
技术领域
1.本发明涉及电池能源管理领域,尤其涉及一种基于mppt的pemfc混合动力的能量控制方法。
背景技术:
2.在燃料电池混合动力系统中,燃料电池控制的选择方法也很重要。在燃料电池输出控制领域,高精度dc/dc控制器和最大功率点跟踪方法是最受欢迎的研究热点。与高精度dc/dc控制器相比,最大功率点跟踪控制方法有效地减少了能量传递过程中的中间环节,具有更高的能量转换效率。并且,与提高燃料电池转换效率或转换器效率相关的工作相比,采用新的控制策略来提高mppt跟踪效率是最简单,最便宜的。因此,mppt的低开发难度和低成本正好是物流行业高成本的需求。为了通过改进dc/dc控制算法来提高转换器的能量转换效率,需要高精度的电子设备和困难的开发过程,并且成本很高。相反,用于燃料电池的mppt不需要具有结构负载的dc/dc转换器,因此开发起来也不那么困难,所以燃料电池输出控制领域,高精度dc/dc控制器和最大功率点跟踪方法是研究的重点和难点。
技术实现要素:
3.为解决现有技术的问题本发明提供的一种基于mppt的pemfc混合动力的能量控制方法,能够降低氢气的消耗,提高焊缝机器人的稳定性。
4.一种基于mppt的pemfc混合动力的能量控制方法,用于对质子交换膜燃料电池/锂电池混合动力系统驱动焊缝机器人的功率进行分配,包括以下步骤:
5.步骤1,flc系统实时采集质子交换膜燃料电池向控制器输出的电压以及电流;
6.步骤2,根据电压以及电流计算出质子交换膜燃料电池电流的变化量、电压的变化量、输出功率以及输出功率变化量,并根据电流的变化量、电压的变化量、输出功率以及输出功率变化量得到步长变量;
7.步骤3,判断电压的变化量是否等于0,当电压的变化量等于0时进入步骤4,否则进入步骤5;
8.步骤4,判断电流的变化量是否等于0,当电流的变化量不等于0进入步骤6,否则进入步骤8;
9.步骤5,判断实时电流变化量与实时电压变化量的比值是否等于上一时刻电流变化量与上一时刻电压变化量的比值,如果等于进入步骤9,否则进入步骤7;
10.步骤6,判断电流的变化量是否大于0,当电流的变化量大于0进入步骤10;否则进入步骤12;
11.步骤7,判断实时电流变化量与实时电压变化量的比值是否大于上一时刻电流变化量与上一时刻电压变化量的比值,如果大于进入步骤11,否则进入步骤13;
12.步骤8,令step(t)=step(t-1),进入步骤14;
13.步骤9,令step(t)=step(t-1),进入步骤14;
14.步骤10,令step(t)=step(t-1) δstep,进入步骤14;
15.步骤11,令step(t)=step(t-1)-δstep,进入步骤14;
16.步骤12,令step(t)=step(t-1)-δstep,进入步骤14;
17.步骤13,令step(t)=step(t-1) δstep,进入步骤14;
18.步骤14,令v(t-1)=v(t),i(t-1)=i(t),直至焊缝机器人完成一个工作循环,返回步骤1;
19.其中,
20.step(t)为当前时刻步长;
21.step(t-1)为上一时刻步长;
22.δstep为步长变量;
23.v(t)为当前时刻质子交换膜燃料电池向控制器输出的电压;
24.i(t)为当前时刻质子交换膜燃料电池向控制器输出的电流;
25.v(t-1)为上一时刻质子交换膜燃料电池向控制器输出的电压;
26.i(t-1)为上一时刻质子交换膜燃料电池向控制器输出的电流。
27.在本发明提供的一种组合式衣架中,还可以具有这样的特征:其中,在步骤2中电流的变化量的计算公式如下:
28.δi=i(t)-i(t-1)
29.式中,δi为电流的变化量。
30.在本发明提供的一种组合式衣架中,还可以具有这样的特征:其中,在步骤2中电压的变化量的计算公式如下:
31.δv=v(t)-v(t-1)
32.式中,δv为电压的变化量。
33.在本发明提供的一种组合式衣架中,还可以具有这样的特征:其中,在步骤2中输出功率的计算公式如下:
34.p
dc
=v(t)i(t)
35.式中,p
dc
为输出功率。
36.在本发明提供的一种组合式衣架中,还可以具有这样的特征:其中,在步骤2中输出功率变化量的计算公式如下:
37.δp
dc
=p
dc
(t)-p
dc
(t-1)
38.式中,δp
dc
为输出功率变化量、p
dc
(t)为当前时刻质子交换膜燃料电池向控制器输出的功率、p
dc
(t-1)为上一时刻质子交换膜燃料电池向控制器输出的功率。
39.在本发明提供的一种组合式衣架中,还可以具有这样的特征:其中,在步骤2中步长变量的计算公式如下:
40.δstep=min{δstep-max,m
×
δp
dc
/δv}
41.δp
dc
(t)/δv(t)=i(t) v(t)δi(t)/δv(t)
42.δstep-max=max{step(t-1)-step(t)}
43.式中,
44.δstep为步长变量;
45.δstep-max为最大步长变量;
46.m为跟踪步长的缩放系数;
47.δp
dc
为输出功率变化量;
48.δv为电压的变化量;
49.δp
dc
(t)为当前时刻质子交换膜燃料电池向控制器输出的输出功率变化量;
50.δv(t)为当前时刻质子交换膜燃料电池向控制器输出的输出电压;
51.i(t)为当前时刻质子交换膜燃料电池向控制器输出的输出电流;
52.v(t)为当前时刻质子交换膜燃料电池向控制器输出的输出电压;
53.δi(t)为当前时刻质子交换膜燃料电池向控制器输出的输出电流的变化量;
54.step(t)为当前时刻步长;
55.step(t-1)为上一时刻步长。
56.在本发明提供的一种组合式衣架中,还可以具有这样的特征:其中,在步骤2中电流的变化量的计算公式如下:
57.δi=i(t)-i(t-1)
58.电压的变化量的计算公式如下:
59.δv=v(t)-v(t-1)
60.输出功率的计算公式如下:
61.p
dc
=v(t)i(t)
62.输出功率变化量的计算公式如下:
63.δp
dc
=p
dc
(t)-p
dc
(t-1)
64.步长变量的计算公式如下:
65.δstep=min{δstep-max,m
×
δp
dc
/δv}
66.δp
dc
(t)/δv(t)=i(t) v(t)δi(t)/δv(t)
67.δstep-max=max{step(t-1)-step(t)}
68.式中,δi为电流的变化量,δv为电压的变化量,p
dc
为输出功率,δp
dc
为输出功率变化量,δstep为步长变量,δstep-max为最大步长变量,m为跟踪步长的缩放系数。
69.在本发明提供的一种组合式衣架中,还可以具有这样的特征:其中,当锂电池的电量低于50%时,质子交换膜燃料电池单独向焊缝机器人供电;当锂电池的电量大于50%且小于80%时,质子交换膜燃料电池与锂电池一起向焊缝机器人供电;当锂电池的电量大于80%时,锂电池对焊缝机器人供电的供电量大于质子交换膜燃料对焊缝机器人供电的供电量。
70.发明的作用与效果
71.根据本发明提供的基于mppt的pemfc混合动力的能量控制方法,因为通过flc系统实时采集质子交换膜燃料电池向控制器输出的电压以及电流,判断锂电池的工作状态以及负载所需要的功率,然后控制器通过改变质子交换膜燃料电池输出的电压和电流。本发明提供的一种基于mppt的pemfc混合动力的能量控制方法,能够降低氢气的消耗,提高焊缝机器人的稳定性。
附图说明
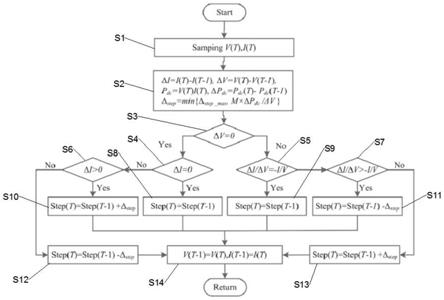
72.图1为本发明中实施例的一种mppt的pemfc混合动力的能量控制方法的流程图。
具体实施方式
73.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,以下结合实施例及附图对本发明作具体阐述。
74.《实施例》
75.图1为本发明中实施例的一种mppt的pemfc混合动力的能量控制方法的流程图。
76.如图1所示,本实施例提供的图1为本发明中实施例的一种mppt的pemfc混合动力的能量控制方法包括如下步骤:
77.步骤1,flc系统实时采集质子交换膜燃料电池向控制器输出的电压以及电流。
78.步骤2,根据电压以及电流计算出质子交换膜燃料电池电流的变化量、电压的变化量、输出功率以及输出功率变化量,并根据电流的变化量、电压的变化量、输出功率以及输出功率变化量得到步长变量。
79.电流的变化量的计算公式如下:
80.δi=i(t)-i(t-1)
81.式中,δi为所述电流的变化量、i(t)为当前时刻所述质子交换膜燃料电池向控制器输出的电流;i(t-1)为上一时刻所述质子交换膜燃料电池向控制器输出的电流。
82.电压的变化量的计算公式如下:
83.δv=v(t)-v(t-1)
84.式中,δv为所述电压的变化量、v(t)为当前时刻所述质子交换膜燃料电池向控制器输出的电压;v(t-1)为上一时刻所述质子交换膜燃料电池向控制器输出的电压。
85.输出功率的计算公式如下:
86.p
dc
=v(t)i(t)
87.式中,p
dc
为所述输出功率、v(t)为当前时刻所述质子交换膜燃料电池向控制器输出的电压;i(t)为当前时刻所述质子交换膜燃料电池向控制器输出的电流。
88.输出功率变化量的计算公式如下:
89.δp
dc
=p
dc
(t)-p
dc
(t-1)
90.步长变量的计算公式如下:
91.δstep=min{δstep-max,m
×
δp
dc
/δv}
92.δp
dc
(t)/δv(t)=i(t) v(t)δi(t)/δv(t)
93.δstep-max=max{step(t-1)-step(t)}
94.式中,δstep为所述步长变量;δstep-max为最大步长变量;m为跟踪步长的缩放系数,m的取值由燃料电池的额定功率确定。(例如,500w燃料电池组时,m的取值在(1.5,2)的区间内时具有比较高的跟踪精度);δp
dc
为所述输出功率变化量;δv为所述电压的变化量;δp
dc
(t)为当前时刻所述所述质子交换膜燃料电池向控制器输出的输出功率变化量;δv(t)为当前时刻所述所述质子交换膜燃料电池向控制器输出的输出电压;i(t)为当前时刻所述所述质子交换膜燃料电池向控制器输出的输出电流;v(t)为当前时刻所述所述质子交换膜燃料电池向控制器输出的输出电压;δi(t)为当前时刻所述所述质子交换膜燃料电池向控制器输出的输出电流的变化量;step(t)为当前时刻步长;step(t-1)为上一时刻步长。
95.步骤3,判断电压的变化量是否等于0,当电压的变化量等于0时进入步骤4,否则进
入步骤5。
96.步骤4,判断电流的变化量是否等于0,当电流的变化量不等于0进入步骤6,当步骤等于0时进入步骤8。
97.步骤5,判断实时电流变化量与实时电压变化量的比值是否等于上一时刻电流变化量与上一时刻电压变化量的比值,如果等于进入步骤9,否则进入步骤7。
98.步骤6,判断电流的变化量是否大于0,当电流的变化量大于0进入步骤10;否则进入步骤12。
99.步骤7,判断实时电流变化量与实时电压变化量的比值是否大于上一时刻电流变化量与上一时刻电压变化量的比值,如果大于进入步骤11,否则进入步骤13。
100.步骤8,step(t)=step(t-1),进入步骤14。
101.步骤9,step(t)=step(t-1),进入步骤14。
102.步骤10,step(t)=step(t-1) δstep,进入步骤14。
103.步骤11,step(t)=step(t-1)-δstep,进入步骤14。
104.步骤12,step(t)=step(t-1)-δstep,进入步骤14。
105.步骤13,step(t)=step(t-1) δstep,进入步骤14。
106.步骤14,v(t-1)=v(t),i(t-1)=i(t),
107.其中,step(t)为当前时刻步长,step(t-1)为上一时刻步长,δstep为步长变量,v(t)、i(t)为当前时刻质子交换膜燃料电池向控制器输出的电压以及电流,v(t-1)、i(t-1)为上一时刻质子交换膜燃料电池向控制器输出的电压以及电流。
108.step(t-1) δstep是在原来基础上增加一个步长,step(t-1)-δstep是在原来基础上减少一个步长,step(t)=step(t-1)是步长等于上一时刻的步长。这个过程是根据上面电压和电流是否等于零和电流改变和电压改变的比值来判断的在上面的步骤3、4、5有描述。
109.其中,焊缝机器人所需的功率为p
load
,质子交换膜燃料电池向焊缝机器人输出的功率为p
fc
,锂电池向焊缝机器人输出的功率为p
bat
。
110.当混合动力系统中的锂电池的电量小于50%时,质子交换膜燃料电池单独向焊缝机器人供电(p
load
=p
fc
),并对锂电池进行充电。
111.当锂电池的电量大于等于50%且小于等于80%时,质子交换膜燃料电池与锂电池一起向焊缝机器人供电(p
load
=p
fc
p
bat
),或质子交换膜燃料电池对锂电池进行充电。
112.当锂电池的电量大于80%时,锂电池和质子交换燃料电池也是一起供电,只是按照分配原则,锂电池比质子交换膜燃料电池更发挥主导作用,比50%到80%时候供电更多保护锂电池。
113.flc系统是一种重要的控制策略,flc使用模糊规则进行决策并控制控制器的输出参数。flc主要包括模糊化,模糊规则库,推理引擎和去模糊化。flc测量质子交换膜燃料电池堆栈输出处的电流和电压值,并确定质子交换膜燃料电池功率以获得控制器的输入。flc的输入为误差e,误差为ce,输出变量为占空比dk。误差e设置为质子交换膜燃料电池功率相对于质子交换膜燃料电池电压的变化,并表示为:它不需要清楚地数值关系,flc的优点是:响应速度快,操作灵活,并且不需要精确的系统数学模型。
114.模糊控制常规用法就是误差e和误差增量ce,模糊的优点就是不用知道他们具体
关系,通过经验知道关系,通过调试获得参考功率。
115.实施例的作用与效果
116.根据本实施例提供的基于mppt的pemfc混合动力的能量控制方法,因为通过flc系统实时采集质子交换膜燃料电池向控制器输出的电压以及电流,判断锂电池的工作状态以及负载所需要的功率,然后控制器通过改变质子交换膜燃料电池输出的电压和电流。本发明提供的一种基于mppt的pemfc混合动力的能量控制方法,能够降低氢气的消耗,提高焊缝机器人的稳定性。
117.上述实施方式为本发明的优选案例,并不用来限制本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
