1.本发明涉及用于借助磁化装置来磁化磁场传感器布置(magnetfeldsensoranordnung)的元件的一种方法和一种系统。
背景技术:
2.从现有技术中已知基于磁阻效应的磁场传感器。这种磁场传感器具有两个彼此上下布置的并通过分离层彼此分开的磁化层。在此,固定层(gepinnten schicht)的平均磁化方向是固定的且在外部磁场中不可改变的,而自由层的平均磁化方向取决于外部磁场。通过将电压施加至两个磁化层处,电流可以流动,该电流取决于由层的磁化方向包围的角度。
3.如果外部磁场超过临界场强,则自由层的磁化可能受到干扰。这种错误定向可能导致磁场传感器具有增加的噪声,这尤其是对于更大的磁场强度而言可能是这种情况。此外,可能存在零场误差(nullfeldfehler)(偏移)的不期望的变化。例如,可以通过在待磁化的层的区域中布置磁化电流导体来逆转错误定向。这类方法例如从文献us 9,291,687 b2、us 9,791,523 b2和us 9,766,301 b2中已知。
4.通常,多个磁场传感器同时经受这种过程。在此,使用具有多个开关的磁化装置,以便磁化磁场传感器的层组。在切换开关时,在磁化电流导体中可能进行不期望的电流流动,该不期望的电流流动由于寄生电容而与期望的磁化电流反向地流动。这可能导致待磁化的层至少部分地错误定向。
技术实现要素:
5.本发明的一个任务在于,说明一种经改善的用于磁化磁场传感器布置的元件的方法以及提供一种经改善的用于磁化磁场传感器布置的元件的系统。该任务通过具有根据本发明的特征的一种借助磁化装置磁化磁场传感器布置的元件的方法和一种用于磁化磁场传感器布置的元件的系统来解决。在优选的实施方式中说明有利的扩展方案。
6.在一种用于磁化磁场传感器布置的元件的方法中,这些元件借助磁化装置来磁化。在此,磁场传感器布置具有多个传感器段。每个传感器段具有多个磁场传感器。磁化装置的磁化电流导体在磁场传感器的区域中如此走向地布置,使得磁场传感器的元件能够磁化。磁化装置的实现方案具有多个并联连接的半桥,所述半桥分别具有高开关pj和低开关nj且分别具有布置在开关pj与nj之间的中心抽头连接部。磁化电流导体与每个中心抽头连接部连接,由此磁化电流导体划分成可单独操控的磁化段。每个磁化段设置用于磁化各一个传感器段的磁场传感器的元件。该方法具有以下方法步骤:首先,将电压施加至磁化装置处。随后,将传感器段sj的元件通过以下方式磁化:两个直接相邻的半桥的两个位于不同电位上的开关nj和p
j 1
或替代地pj和n
j 1
同时闭合,由此相应的磁化段mj加载有电流。在此,至少一个另外的开关n
x《j
或p
y》j 1
或替代地p
x《j
或n
y》j 1
闭合。
7.有利地,闭合至少一个另外的开关具有以下效果:至少在磁化电流导体的另一磁化段m
x≠j
中防止由于寄生电容而造成的不期望的方向上的电流流动。由此,至少一个传感器
段s
x≠j
得到保护,由于至少一个传感器段s
x≠j
的磁场传感器的待磁化的元件不暴露于沿着不期望的方向延伸的磁场。由此,磁场传感器的待磁化的元件不是错误定向的。有利地,由此可以降低磁场传感器的噪声。特别地,可以针对大的磁场强度改善噪声特性。此外,该方法使得磁场传感器不具有零场误差的不期望的变化。由此同样可以防止不期望的增益变化,其中,该增益是输出信号的变化和待测量的外部磁场的变化之商。
8.在一种实施方式中,在传感器段sj的元件磁化期间,所有另外的开关n
x《j
和p
y》j 1
或替代地p
x《j
和n
y》j 1
同时闭合。有利地,闭合所有另外的开关n
x《j
和p
y》j 1
或替代地p
x《j
和n
y》j 1
实现如下:在磁化电流导体的所有另外的磁化段m
x≠j
中,防止由于寄生电容而造成的不期望的方向上的电流流动。
9.在一种实施方式中,从布置在磁化电流导体的最外部的端部处的传感器段开始,沿着磁化电流导体按顺序地磁化彼此相继的传感器段的元件。有利地,由此可以降低该方法中的切换开销,因为在每个磁化步骤中降低切换操作的数量。
10.在一种实施方式中,在磁化传感器段sj的元件之后并且在磁化传感器段s
j 1
的元件之前,断开开关p
j 1
或替代地n
j 1
。有利地,由此在磁化步骤之间引入中间步骤。这使得在每个步骤中仅须断开或闭合一个开关,由此在每个步骤中降低电路开销。由此,在每个切换步骤中减少可能引起不期望的方向上的电流流动的切换峰值的出现。
11.在一种实施方式中,为了磁化布置在磁化电流导体的一端部处的第一传感器段s1的元件,闭合开关p2或替代地开关n2。在所有其余的磁化步骤中,开关pj或nj已经预先、即在先前的切换步骤中闭合。在一种实施方式中,在磁化第一传感器段s1的元件之前,首先闭合开关n1并且随后闭合所有开关p
x》2
,或者替代地,首先闭合开关p1并且随后闭合所有开关n
x》2
。在一种实施方式中,在磁化最后一个传感器段sn的元件之后,首先断开开关nn并且随后断开开关p
n 1
,或替代地,首先断开开关pn并且随后断开开关n
n 1
。有利地,这些方法具有以下效果:磁化装置可以特别软(sanft)地接通或关断,即在方法开始时或在方法结束时也降低切换操作的数量。
12.在一种实施方式中,磁化磁场传感器布置的磁场传感器的设置为自由层的铁磁层。在一种实施方式中,磁场传感器构造为tmr传感器或gmr传感器。
13.一种用于磁化磁场传感器布置的元件的系统具有磁场传感器布置和磁化装置。磁场传感器布置具有多个传感器段。每个传感器段具有多个磁场传感器。磁化装置具有磁化电流导体。磁化电流导体在磁场传感器的区域中如此走向地布置,使得磁场传感器的元件能够磁化。磁化装置的分别具有高开关pj和低开关nj的多个并联连接的半桥分别具有布置在开关之间的中心抽头连接部。磁化电流导体与每个中心抽头连接部连接,由此磁化电流导体划分成可单独操控的磁化段。每个磁化段设置用于磁化各一个传感器段的磁场传感器的元件。磁化装置具有两个附加开关p
aux
和n
aux
。附加开关p
aux
和n
aux
布置在磁化电流导体的相对置的端部处并且与位于相同电位上的开关pj或nj并联连接。附加开关p
aux
和n
aux
设置用于在磁化磁场传感器布置的元件时始终闭合。有利地,附加开关实现如下:电流可以沿着磁化电流导体始终在期望的方向上进行。
附图说明
14.结合实施例的以下描述,本发明的上述特征和优点变得更清楚和更容易理解,结
合示意图更详细地阐述这些实施例。在此示出:
15.图1以立体视图示出磁场传感器;
16.图2示出具有磁化装置的磁场传感器布置和磁化装置的磁化电流导体的走向;
17.图3示出磁场传感器布置和磁化装置的其他元件;
18.图4示出用于磁化磁场传感器布置的元件的已知方法;
19.图5示出在磁化根据图4的电路图的磁场传感器布置的元件时彼此相继的磁化段的电流;
20.图6示出用于磁化磁场传感器布置的磁场传感器的元件的方法;
21.图7示出在磁化根据图6的电路图的磁场传感器布置的元件时彼此相继的磁化段的电流;和
22.图8示出用于磁化具有附加开关的磁场传感器布置的元件的系统。
具体实施方式
23.图1以立体视图示意性示出磁场传感器1。磁场传感器1例如基于磁隧道电阻(英语:tunnel magnetoresistance,隧道磁电阻,tmr)的原理。因此,磁场传感器1也可以称为tmr传感器1。
24.磁场传感器1具有衬底2。例如,衬底2可以具有硅。然而,衬底2也可以具有其他材料,例如其他半导体和/或半导体氧化物。磁场传感器1还具有布置在衬底2上的集成电路3(英语:integrated circuit,ic)。例如,集成电路3可以设置用于操控磁场传感器1。
25.在衬底2上方布置有导电地构造的下部接触元件4。在下部电接触元件4上布置有下部铁磁层5。下部铁磁层5例如可以具有铁磁合金,例如cofeb合金或其他铁磁材料。在下部接触元件4与下部铁磁层5之间也可以布置有附加的层。例如,也可以设置有反铁磁层。例如,反铁磁层可以设置用于预给定下部铁磁层5内的磁化。例如,反铁磁层可以具有ptmn合金或irmn合金。此外,可以设置附加的层作为分离层,该分离层可以具有例如钽(ta)和/或钌(ru)。
26.在下部铁磁层5上布置有绝缘层6。绝缘层6可以具有例如氧化锰(mgo)或例如氧化铝(al2o3)或其他电绝缘材料。在绝缘层6上布置有上部铁磁层7,该上部铁磁层同样可以具有例如cofeb合金。在上部铁磁层7上布置有上部电接触元件8。在上部铁磁层7与上部接触元件8之间同样可以布置有附加的层,例如是分离层和/或其他符合目的的层。
27.如果在下部接触元件4与上部接触元件8之间施加电压9,则隧道电流10可以流动,该隧道电流越过(
ü
berwindet)绝缘层6。在此,隧道电阻取决于下部铁磁层5的磁化和上部铁磁层7的磁化。更准确地说,隧道电阻与下部铁磁层5的平均磁化方向11与上部铁磁层7的平均磁化方向12之间的角度的余弦成比例。
28.在图1中,下部铁磁层5的磁化方向11借助实线箭头表明。如果没有超过外部磁场13的临界磁场强度,则下部铁磁层5的磁化方向11是固定地预给定的并且在外部磁场13中是不可改变的。外部磁场13在图1中以条形磁铁的形式象征性地示出。下部铁磁层5的磁化方向11可以例如借助反铁磁层确定。
29.预给定并固定下部铁磁层5的磁化方向11的另一可能性在于:当在期望的方向上施加外部磁场13时,加热下部铁磁层5。仅当下部铁磁层5已冷却时,才关断外部磁场13。该
过程也可以称为退火(einbrennen)(英语:annealing)。由于只要没有超过临界磁场强度,下部铁磁层5的磁化方向11在外部磁场13中就是不可改变的,因此下部铁磁层5也可以称为固定层5。如果超过外部磁场13的临界磁场强度,则固定层5的磁化可能受到干扰。在这种情况下,磁化的重新退火可能是不能够实现的,因为集成电路3可能在退火过程中被破坏。对于固定层5,临界磁场强度可以是例如40mt。
30.上部铁磁层7的平均磁化方向12在图1中借助虚线箭头表明。上部铁磁层7的磁化方向12与下部铁磁层5相比是未固定的,并且出于该原因而如此遵循外部磁场13,使得上部铁磁层7的磁化方向12反向平行于外部磁场13的投射到上部铁磁层7上的分量地取向。上部铁磁层7也可以称为自由层7,因为其磁化方向12是未固定的。在本说明书的范畴中,上部铁磁层7也称为自由层7,即使其尚不具有优选的磁化方向12。
31.如果下部铁磁层5的平均磁化方向和上部铁磁层7的平均磁化方向平行地定向,则隧道电阻具有最小值。如果下部铁磁层5的平均磁化方向和上部铁磁层7的平均磁化方向反向平行地定向,则隧道电阻具有最大值。如此,磁场传感器1能够探测外部磁场13的磁场方向。
32.根据图1的磁场传感器1例如构造为tmr传感器。替代地,磁场传感器1也可以构造为gmr传感器(英语:giant magnetoresistance,巨磁电阻,gmr)。在这种情况下,铁磁层5、7与接触元件4和8侧向接触,从而相对于衬底2可以进行水平电流流动,而在tmr传感器的情况下,隧道电流10相对于衬底2在垂直方向上进行。此外,代替电绝缘的绝缘层6,gmr传感器具有非磁性的绝缘层6,其例如可以具有铜。然而,下部铁磁层5、绝缘层6和上部铁磁层7如在tmr传感器1中那样相对于衬底2垂直地彼此上下布置。
33.超过关于自由层7的磁化的临界磁场强度(其例如可以为3000μt)的外部施加的磁场13导致自由层7的平均磁化方向12受到干扰。这称为自由层7的持久的错误定向。错误定向可能导致磁场传感器1具有零场误差的不期望的变化,即固定层5的磁化方向11与自由层7的磁化方向12之间的偏移(英语:offset)的变化。此外,自由层7的错误定向可能导致不期望的增益(即隧道电阻的变化与外部磁场13的变化的商)的变化。
34.自由层7的磁化方向12的错误定向可以得到补偿,其方式为:在自由层7的位置处产生足够强的外部磁场13,该外部磁场再次建立自由层7的期望的平均磁化方向12。这是通过磁化电流导体实现的,该磁化电流导体在磁场传感器1的区域中如此走向地布置,使得磁场传感器1的自由层7能够借助磁化电流导体进行磁化。由此可以校正或重置错误取向或错误定向。在此,可以使磁化电流导体加载有例如30ma的电流,由此自由层7的位置处的磁场强度例如可以为15mt。在此,如果例如在几十纳秒的时间段内对磁化电流导体进行加载,则可能足以再次建立自由层7的磁化。自由层7的磁化的这种产生或重置也可以称为“位重置(英语:bit reset)”。
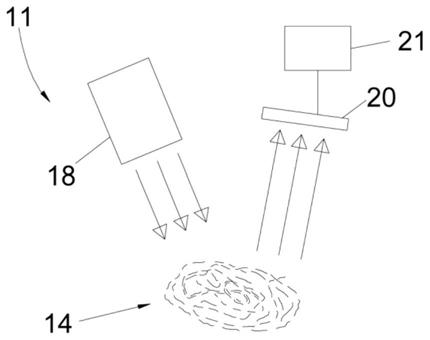
35.符合目的地,通常,不是仅仅单个磁场传感器1的上部铁磁层7在“位重置”的范畴中磁化,而是磁场传感器布置14的多个磁场传感器1的多个自由层7在“位重置”的范畴中磁化。图2示意性示出具有磁场传感器布置14和用于磁化磁场传感器1的自由层7的磁化装置15的示例性电路。磁化装置15例如可以是集成电路3的组成部分。
36.磁场传感器布置14具有四个电阻段48。每个电阻段48分别具有多个磁场传感器1。例如,一个电阻段48可以具有几百个磁场传感器1。这可以涉及tmr传感器1或gmr传感器1。
为了清楚起见,电阻段48的磁场传感器1未在图2中示出。各一个电阻段48的磁场传感器1由于其相应的隧道电阻而形成电阻。符合目的地,电阻段48的电阻可以是相同大小的。然而,这不是强制性地必需的。四个电阻段48如此彼此电连接,使得其形成惠斯通电桥电路。两个信号馈线47——这两个信号馈线中的各一个布置在串联连接的两个电阻段48之间——使得能够求取磁场传感器布置14的总信号,其方式为:由两个信号馈线47处存在的信号求取差分信号。
37.磁化装置15具有磁化电流导体17。磁化电流导体17在磁场传感器1的区域中如此走向地布置,使得磁场传感器1的元件能够磁化。磁化电流导体17可以符合目的地沿着所有磁场传感器1布置。理想地,磁化电流也将会沿着所有磁场传感器1同时流动。但是,由于磁化电流导体17的相对高的电阻、有限的运行电压和高的磁化电流,这是不可能的,从而需要将磁场传感器1分段成电阻段48和传感器段16。分段成传感器段16是在图3的描述的范畴中阐述的。分段成电阻段48仅是可选的并且不是强制性地必需的。
38.例如,磁化电流导体17可以设置用于分别磁化磁场传感器布置14的磁场传感器1的自由层7。磁化电流导体17也可以替代地用于磁化磁场传感器1的下部铁磁层5或固定层5。为此,磁化电流导体17必须如此布置在下部铁磁层5的区域中,使得下部铁磁层5能够磁化。在以下描述中,仅通过示例阐述设置为自由层7的上部铁磁层7的磁化。然而,以下描述也能够类似地转移到下部铁磁层5或固定层5的磁化上。
39.图3示出图2的磁场传感器布置14和磁化装置15的其他元件。磁场传感器布置14具有多个传感器段16。例如,图2的磁场传感器布置总共具有六个传感器段16。然而,传感器段16的数量可以是任意的。每个传感器段16分别具有多个磁场传感器1。例如,一个传感器段16可以具有几百个磁场传感器1。在此,这可以涉及tmr传感器1或gmr传感器1。为了清楚起见,传感器段16的磁场传感器1未在图3中示出。因此,传感器段16的数量不必对应于电阻段48的数量。可以将任意数量的传感器段16分组为四个电阻段48。符合目的地,传感器段16的数量可以是能够被四整除的,以便能够将相同大小的四个电阻段48实现为惠斯通电桥电路。传感器段16的磁场传感器1例如可以分别布置在单独的衬底2上或在共同的衬底2上。也可以分别为传感器段16的任何子集设置单独的衬底2。相应地,磁化装置15可以实现在多个衬底2上并且实现为多个集成电路3的组成部分。
40.磁化装置15具有多个并联连接的半桥18,所述半桥分别具有高开关pj和低开关nj且分别具有布置在开关pj与nj之间的中心抽头连接部19。开关例如可以构造为mosfet(英语:metal-oxide-semiconductor field-effect transistor,金属氧化物半导体场效应晶体管)。磁化电流导体17与每个中心抽头连接部19连接,由此磁化电流导体17划分成可单独操控的磁化段20。每个磁化段20设置用于磁化各一个传感器段16的磁场传感器1的元件。由于在示例性实施方式中存在六个传感器段16,因此磁化装置15具有总共六个磁化段20是符合目的的。出于该原因,在所示的示例性实施方式中,磁化装置15总共具有七个半桥18,即七个高开关pj和七个低开关nj。开关pj、nj可以借助在图3中未示出的控制装置可自由控制地构造。自由控制的特征在于,可以任意选择开关过程的顺序。通过将电压施加至半桥18处并应用符合目的的电路图,能够以这种方式磁化各个传感器段16。所施加的电压例如可以位于2v至3v的范围中,然而不限于此。原则上,在本说明书的范畴中,值说明或值范围说明不应理解为限制性的,而应理解为允许本领域技术人员实施本发明的合适数量级的说明。
41.图4示出用于借助磁化装置15磁化磁场传感器布置14的元件的方法的切换方案(schaltschema)21。切换方案21仅通过示例示出四个传感器段16的元件的磁化。然而,每个传感器段16的元件可以以相同的类型和方式进行磁化。出于该原因,仅阐述步骤22、23、24,在这些步骤的范畴中将单个但任意的传感器段sj的元件磁化。如果开关断开,即处于非导通的状态中,则这在图4中借助“0”表明。相反,如果开关闭合,即处于导通状态中,则这在图4中借助“1”表明。
42.在将电压施加至磁化装置15处之后,传感器段sj的元件根据以下方案磁化。首先,在第一步骤22中,闭合开关nj。由于所有其余开关都是断开的,因此还没有电流流动。在第二步骤23中,附加地闭合开关p
j 1
。由此,电流流过磁化电流导体17的磁化段mj,由此将磁场传感器布置14的传感器段sj的磁场传感器1的元件磁化。在第三步骤24中,再次断开开关p
j 1
,从而再次没有电流可以流动。现在针对随后的传感器段s
j 1
重复步骤22、23、24。因此,按顺序磁化传感器段16的元件。
43.在磁化传感器段16的元件时,电流必须始终在期望的方向上进行。如果不是这种情况,则待磁化的层5、7可能沿着优选方向至少部分地反复磁化(ummagnetisiert)。在此,磁化的干扰可能受到随机效应的影响,该随机效应在磁场传感器1的输出端处作为不期望的附加噪声变得明显。
44.图5示出电流图25,其中,在横坐标26上绘制时间并且在纵坐标27上绘制电流。示出的是在磁化磁场传感器布置14的元件时磁化电流导体17的四个彼此相继的磁化段20的电流28、29、30、31。
45.可以看到总共四个彼此相继的电流脉冲32。当磁化四个彼此相继的传感器段16的元件时,电流脉冲32出现。电流脉冲32可以在例如10ns的时间段内进行并且具有例如30ma的幅度。电流脉冲32如此进行,使得电流流动始终在期望的方向33上进行,该期望的方向在图3中示出。然而,也可以将磁化装置15转换极性,从而电流脉冲32将在相反方向上进行。
46.除了期望的电流脉冲32之外,还出现附加脉冲34。当变为另一磁化段20时,附加脉冲34出现在磁化电流导体17的磁化段mj中。在此,尤其是当相邻且随后的磁化段m
j 1
加载有电流用以磁化传感器段s
j 1
的元件时,磁化段mj中的附加脉冲34具有高的幅度。在电流脉冲32的上升沿35的区域中,附加脉冲34是负的,即其沿着相反方向36进行,该相反方向同样在图3中示出。这可能导致磁场传感器1的待磁化的元件的反复磁化。由于磁化电流导体17的磁化段20的电耦合,出现沿相反方向36的附加电流流动。由空间不足而产生磁化段20的电耦合的必然性。为了克服电耦合,每个磁化段20都必须具有其自己的半桥18。两个相邻的磁化段20因此将不具有共同的半桥18。然而,这将需要明显更高数量的开关。出于该原因,磁化段20电耦合地构造。但是,这导致寄生电容37在每个磁化段20的区域中起作用。这些引起反向的电流流动。因此,在图4中所示的方法或切换方案21的缺点是,在磁化传感器段16的元件的第二步骤23的范畴中,在相邻的磁化段20中可能发生反向的电流流动。
47.本发明基于克服该缺点的构思。图6示出用于借助磁化装置15磁化图3的磁场传感器布置14的磁场传感器1的元件的方法38。方法38相应于切换方案(schaltplan)39执行,该切换方案包括针对切换步骤101至115的指令,在所述切换步骤的范畴中,在将电压施加到磁化装置15处以磁化各个传感器段16的元件之后切换磁化装置15的开关pj和nj。
48.传感器段sj的元件通过以下方式磁化:两个直接相邻的半桥18的位于不同电位上
的两个开关nj和p
j 1
或替代地pj和n
j 1
同时闭合。由此,相应的磁化段mj加载有电流,由此传感器段sj的磁场传感器1的元件磁化。这是图6中在第三切换步骤103、第五切换步骤105、第七切换步骤107、第九切换步骤109、第十一切换步骤111和第十三切换步骤113之后的情况。此外,至少一个另外的开关n
x《j
或p
y》j 1
或替代地p
x《j
或n
y》j 1
闭合。在图6的示例性实施方式中,在第三切换步骤103、第五切换步骤105、第七切换步骤107、第九切换步骤109、第十一切换步骤111和第十三切换步骤113中,所有另外的开关n
x《j
或p
y》j 1
闭合。然而,这不是必需的。另外的开关n
x《j
或p
y》j 1
之一闭合是足够的。闭合至少一个另外的开关n
x《j
或p
y》j 1
导致,在磁化段mj(该磁化段为了磁化传感器段sj的元件而加载有电流)与另一开关n
x《j
或p
y》j 1
之间没有沿着相反方向36的电流可以沿着磁化电流导体17流动。如果——如在示例性实施方式中那样——所有另外的开关n
x《j
或p
y》j 1
闭合,则反向电流不能在磁化段m
x≠j
中的任何一个中流动。由此,保护所有其余传感器段s
x≠j
免受反向电流的影响以及因此免受错误定向的磁场的影响。由于反向电流尤其出现在直接相邻的、预先加载有电流的磁化段m
j-1
中(参见图5),可能符合目的的是:仅开关n
j-1
作为另外的开关附加地闭合,以便有效地保护磁场传感器布置14的所有磁场传感器1。
49.仅示例性地,图6示出从布置在磁化电流导体17的最外部的端部处的传感器段16开始地沿着磁化电流导体17按顺序地磁化彼此相继的传感器段16的元件。然而,这不是强制性地必需的。使磁化段20加载电流的顺序也可以是任意的。然而,按顺序的磁化提供以下优点:可以降低切换操作的数量。尤其是当彼此相继的传感器段16沿着磁化电流导体17按顺序地磁化并且附加地所有另外的开关n
x《j
或p
y》j 1
或替代地p
x《j
或n
y》j 1
在相应的切换步骤103、105、107、109、111、113中闭合,可以降低切换操作的数量。
50.在磁化传感器段sj的元件之后并且在磁化传感器段s
j 1
的元件之前,在可选的附加切换步骤104、106、108、110、112的范畴中可以断开开关p
j 1
或替代地n
j 1
。在此,同样地,闭合至少一个另外的开关n
x《j
或p
y》j 1
或替代地p
x《j
或n
y》j 1
,以便至少在一个磁化段20中防止反向的电流流动。附加的切换步骤104、106、108、110、112也可以省略,然而提供以下优点:在每个切换步骤103至113之间仅需要执行一个切换操作,即仅需要断开或闭合一个开关,由此可以降低切换峰值。
51.为了磁化第一传感器段s1的布置在磁化电流导体17的一端部处的元件,可以在第三切换步骤103的范畴中闭合开关p2或替代地开关n2,即在第二切换步骤102之后断开该开关。在磁化第一传感器段s1的元件之前,也可以首先在第一切换步骤101的范畴中闭合开关n1并且随后在第二切换步骤102的范畴中闭合所有开关p
x》2
,或替代地,首先闭合开关p1并且随后闭合所有开关n
x》2
。由此,第二切换步骤102之后的状态与第四切换步骤104之后的状态相同。然而,在第二切换步骤102之后闭合开关p
x》2
中的至少一个或替代地开关n
x》2
中的至少一个可能是足够的。第一切换步骤101和第二切换步骤102也可以互换。总之,第一切换步骤101和第二切换步骤102提供以下优点:磁化装置15在反向电流方面特别软地接通。然而,第一切换步骤101和第二切换步骤102也可以省略。
52.在磁化最后一个传感器段sn的元件之后,其中,在示例性实施方式中n=6,可以在第十四切换步骤114的范畴中断开开关nn并且随后在第十五切换步骤115的范畴中断开开关p
n 1
,或替代地,首先断开开关pn并且随后断开开关n
n 1
。因此,第十四切换步骤114之后的状态与第十二切换步骤112之后的状态相同。第十四切换步骤114和第十五切换步骤115具
有以下优点:磁化装置15在反向电流方面特别软地关断。第十四切换步骤114和第十五切换步骤115也可以互换。然而,第十四切换步骤114和第十五切换步骤115也可以省略。
53.图7示出电流图40,其中,在横坐标26上绘制时间并且在纵坐标27上绘制电流。示例性示出的是,在根据图6的方法38来磁化磁场传感器布置14的元件时,图3的磁化装置15的磁化电流导体17的最后三个磁化段20的电流41、42、43。
54.传感器段s4、s5和s6的磁场传感器1的元件依次磁化。根据图6,在第十三切换步骤113之后磁化传感器段s6。相关的磁化段m6的相应电流41在第十三切换步骤113之后最大。类似地,相关的磁化段m5的电流42在第十一切换步骤111之后最大,并且相关的磁化段m4的电流43在第九切换步骤109之后最大。电流41、42、43的精准的变化过程可以基于基尔霍夫定律来进行追溯。在此,这不作更详细的阐述。特别地,图7示出,图6的切换方案39导致在任何时间点都没有负的磁化电流流动。这提供以下优点:磁场传感器1的待磁化的铁磁层5、7始终在期望的方向上磁化。
55.图6的用于借助磁化装置14磁化磁场传感器布置14的元件的方法38的替代方案提供一种用于磁化磁场传感器布置14的元件的系统44,该系统在图8中示出。系统44具有与图3的磁场传感器布置14相同构造的磁场传感器布置14和另一磁化装置45。另一磁化布置45具有与图3的磁化布置15的极大相似性。在以下描述中,仅阐述磁化装置15、45之间的差异。
56.另一磁化装置45具有两个附加开关p
aux
和n
aux
。附加开关p
aux
和n
aux
布置在磁化电流导体17的相对置的端部处并且与位于相同电位上的开关pj或nj并联连接。附加开关p
aux
和n
aux
设置成在磁化磁场传感器布置14的元件时始终闭合。与此相反,附加开关p
aux
和n
aux
在图8中因此仅示出为断开,以便其能够被识别。闭合的附加开关p
aux
和n
aux
使得电流流动能够始终在期望的方向33上进行并且决不在相反的方向36上进行,由此磁场传感器1的待磁化的层5、7始终可以在期望的方向上磁化。例如,系统44使得图4的切换方案21或其他切换方案能够用于磁化,而将会干扰铁磁层5、7的磁化的反向电流不能流动。因此,引入开关p
aux
和n
aux
的附加开销通过图4的更简单的切换方案来进行补偿。
57.为了能够在两个方向的方向33、36上执行“位重置”,系统44可以具有另外的附加开关p
aux
和n
aux
。这些在图7中以虚线示出。另外的附加开关p
aux
与附加开关n
aux
一起形成附加半桥。另外的附加开关n
aux
与附加开关p
aux
一起形成另外的附加半桥。由此,可以如此执行图4的方法21或图6的方法38,使得磁化电流可以在反向的方向33、36上流动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。