1.本发明涉及用于净化交通工具的方法和系统,特别涉及一种紫外线棒。
背景技术:
2.商用飞行器包括具有各种设施的内舱,诸如盥洗室和舱用厨房。如可以理解的,在典型的飞行期间,这些设施中的各种表面会被污染。例如,乘客和飞行服务员接触门把手以进入盥洗室,并且有时在这些把手附近打喷嚏。简而言之,在某些飞行期间,门把手和其它类似部件最终覆盖有各种污染物(诸如病毒、细菌和其它类似病原体或微生物污染物)。
3.传统的方法涉及飞行服务员定期清洁这些表面。此外,地面清洁人员在飞行之间进行全面的净化。然而,在某些情况下,可能没有足够的时间来有效地清洁每个触摸表面,例如在两次连续使用之间。此外,各个飞行服务员可能不能彻底清洁每个表面或错过一些表面。因此,各种污染物可能保留在特定表面上,这可能对未来的乘客造成真实和/或能感知到的健康问题。
技术实现要素:
4.描述的是一种用于净化交通工具的方法和系统。在某些示例中,描述了一种净化设备。该净化设备包括设备主体和紫外线(uv)灯。该uv灯包括uv光源,该uv光源联接到设备主体并且被配置成相对于设备主体移动,其中,多个开口被设置在所述uv光源附近。
5.在另一示例中,描述了一种机器人。该机器人包括末端执行器和联接到末端执行器的净化设备。该净化设备包括设备主体和uv灯。该uv灯包括uv光源,该uv光源联接到设备主体并且被配置成相对于设备主体移动,其中,多个开口被设置在所述uv光源附近。
6.本文描述了根据本公开的发明特征的例示性、非排他性示例。下面参照附图进一步描述这些和其它示例。
附图说明
7.通过参照结合了例示各种示例的附图的以下描述,可以最好地理解本公开。
8.图1至图5例示了根据一些示例的净化设备的各个角度的表示。
9.图6是根据一些示例的用于利用净化设备的技术的处理流程图。
10.图7a是对应于用于维护和维修飞行器的方法的处理流程图。
11.图7b例示了根据一些示例的示例飞行器的框图。
12.图8例示了根据一些示例的示例机器人的框图。
13.图9是根据一些示例的飞行器的示意图,例示了被定位在飞行器的盥洗室和舱用厨房中的净化系统。
具体实施方式
14.在下面的描述中,阐述了许多具体细节以便提供对所提出的概念的透彻理解。所
提出的概念可以在没有一些或所有这些具体细节的情况下实践。在其它情况下,没有详细描述众所周知的处理操作,以避免不必要地使所描述的概念模糊。尽管将利用特定示例描述一些概念,但是将理解的是,这些示例并非旨在进行限制。
15.介绍
16.本文描述的是一种用于交通工具应用的净化设备。由于各种设计和操作方面的原因,对诸如商用飞行器之类的交通工具的净化通常相当具有挑战性。在某些示例中,这种交通工具包括通过传统清洁技术难以到达的缝隙和其它地方。此外,对于向公众开放的交通工具,为了最大限度地利用交通工具,需要快速清洁周转,因此通常需要对工具进行重新配置,以避免浪费时间获取新工具。有时,需要在乘客在场时对交通工具执行净化。本文描述的净化设备解决了这些挑战。
17.图9中例示了这种待净化的交通工具的示例。图9是根据一些示例的包括盥洗室902和舱用厨房904的飞行器900的示意图。这些设施中的每一者由多个不同的人使用。例如,在每次飞行期间,特别是在长的洲际飞行期间,每个盥洗室902通常被使用几十次。此外,这些设施中的每一者包括多个表面,在某些情况下,这些表面经由直接接触(例如,触摸)或间接接触(例如,打喷嚏,咳嗽)而被污染。这些表面中的一些表面具有复杂的几何形状,这使得净化过程更具挑战性。
18.净化系统示例
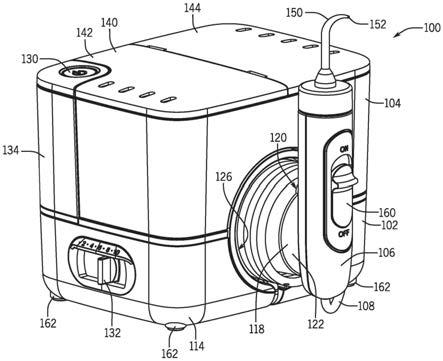
19.图1至图5例示了根据一些示例的净化设备的各个角度的表示。图1至图5例示了净化设备100。根据一些示例,净化设备100被配置成通过破坏病原体来净化交通工具(诸如飞行器900)上的表面。在各种示例中,净化设备100具有适合于净化交通工具的各种表面的形状因子。因此,例如,净化设备100的长度在12英寸至24英寸之间并且包括适合于交通工具内的各种角落和缝隙的狭窄形状因子。
20.净化设备100包括设备主体102、紫外线(uv)灯104和电池106。在各种示例中,设备102和/或净化设备100的其它部分由塑料、复合材料、金属、织物、皮革和/或其它此类合适的材料构成。电池106储存并提供用于净化设备100的操作的电力,诸如用于操作uv灯104的电力。电池106联接到设备主体102或uv灯104。在某些示例中,电池106是可充电和/或可更换的。因此,例如,电池106被配置成与净化设备100的其余部分分离并且新电池被更换以为净化设备100提供更多电力。
21.设备主体102联接到uv灯104。在某些示例中,设备主体102包括一个或更多个控制器122(其包括一个或更多个单核或多核处理器和/或存储器)、数据和/或电力通信部件124(例如,电池、布线、和/或有线或无线通信)、用户接口120(例如,按钮、扬声器、屏幕、触摸屏和/或从用户接收命令和/或向用户提供信息的其它此类接口)和/或其它此类部件。在某些示例中,设备主体102包括把手112。把手112被配置成供净化设备100的用户握住净化设备100。因此,用户将他们的手穿过把手112以握住净化设备100。在某些示例中,把手112完全环绕被配置成容纳用户的手的开口。这种配置使净化设备100从用户的手滑落并丢失在交通工具的各种缝隙中的可能性最小化。
22.在某些示例中,设备主体102包括用于操作uv灯104的用户接口120。例如,用户接口120允许打开/关闭uv灯104的光源(诸如uv光源108),调节uv光源108的强度,改变uv光源108的操作模式,或者以另一方式控制uv光源108。在某些示例中,用户接口120经由数据和/
或电力通信部件124在通信上联接到控制器122。在某些示例中,控制器122接收来自用户接口120的输入并提供控制净化设备100的对应响应的数据。因此,控制器122(例如,经由数据和/或电力通信部件124)向净化设备100的各个部分提供数据以例如控制那些各个部分的操作。另外,在某些示例中,控制器122向用户接口120提供各种数据(例如,旨在借助用户接口120通过视觉、音频和/或另一方式传递用以操作净化设备100的数据),以便用户接口120与用户进行通信。在某些附加示例中,净化设备100不包括控制器122,而是包括用于控制从一个或更多个电池到uv光源108的电力流动的开关。
23.在各种示例中,uv灯104被配置成相对于设备主体102旋转、转动(swivel)和/或延伸(例如,伸缩)。因此,在各种示例中,uv灯104安装在铰链、球窝连接件、伸缩设备、可移动臂和/或另一此类可移动连接件上。因此,uv灯104能够被配置成将uv辐射照射到通常无法到达的区域中。
24.如上所述,uv灯104包括一个或更多个uv光源108。在各种示例中,uv光源108可以是被配置成发射uv光(例如,uv光波长内的uv辐射)的光源。在各种示例中,uv光源108是白炽灯泡、一个或更多个发光二极管和/或至少发射某些波长的uv光的另一形式的灯,如本文进一步描述的。
25.由uv光源108发射的uv光可以包括大约在200纳米(nm)至260nm之间或更大的uv子范围内的uv辐射。这种uv辐射允许通过使各种表面直接或间接暴露于uv辐射来净化这些表面。在各种示例中,uv光源108生成短波紫外线-c(例如,100nm至280nm)内的uv辐射(这对于杀菌照射是有用的)以及其它波长的光。
26.在某些示例中,uv灯104另外包括滤波器114。在某些示例中,滤波器114被配置成联接到uv灯104。在这样的示例中,滤波器114通过机械联接(诸如突耳、按扣、紧固件和/或其它此类机械技术)、通过磁性联接、通过粘合剂和/或通过其它技术(诸如)联接到uv灯104。因此,在此类示例中,滤波器114被配置成根据需要从uv灯104的一侧或更多侧附接和/或移除。
27.滤波器114是带通、低通和/或其它滤波器,其被配置成仅允许特定波长的uv辐射通过。因此,在某个示例中,滤波器114是低通滤波器,其允许波长短于大约225nm至245nm(例如,230nm或240nm)的uv辐射通过滤波器114。在此类示例中,滤波器114仅允许例如波长为240nm或更短的光通过。不受任何特定理论的限制,据信,在某些情况下,这种低于240nm范围的uv辐射对病原体净化特别有效,同时对人类是安全的。因此,滤波器114的使用允许uv灯104被操作以对表面进行消毒,同时对于该区域周围的任何人员都是安全的。因此,当装配有滤波器114时,净化设备100能够用于具有没有佩戴uv防护装备的人的区域。
28.图5示出了开口116被设置在uv光源108周围。如图5所示,两个开口116被设置在uv光源108周围,但其它示例包括任意数量的开口。开口116被设置在uv光源108附近以允许反射辐射从第一侧150传递到第二侧152,或者允许反射辐射从第二侧152传递到第一侧150。在某些示例中,uv光源108包括反射饰面(finishes)以进一步帮助uv辐射的反射。
29.在各种示例中,uv光源108被配置成在多个方向上提供uv辐射,诸如在图2的示例中所示的方向140和方向142上,图2的示例包括被定位在第一侧150和第二侧152上的uv光源,以分别朝着第一侧150和第二侧152发射uv光。在某个示例中,方向140和方向142是相反方向,但在其它示例中,uv光源108在任意数量的方向上发射光。
30.另外,如图5所示,反射器110通过例如机械联接(诸如突耳、按扣、紧固件和/或其它此类机械技术)、通过磁性联接、通过粘合剂和/或通过其它技术(诸如)联接到uv灯104的一侧或更多侧。反射器110被配置成将在方向140上朝着第一侧150发射的uv辐射反射成第二侧152的uv辐射,从而增加在朝着第二侧152的方向142上发射的uv辐射的强度。因此,在uv灯104的第一侧150上生成的uv辐射被反射器110通过开口116朝着uv灯104的第二侧152反射。这种配置允许通过增加uv辐射的强度来由uv灯104更有效地对表面进行消毒(sanitation)。因此,当仅需要对一个表面或仅在一个方向上进行消毒时,反射器110的使用实现了有效的消毒。
31.在某些示例中,uv灯104包括在第一侧上的滤波器114和在第二侧上的反射器110。这样的配置允许增加从uv灯104的一侧输出的uv辐射的强度,同时将这种光滤波到期望波长内。uv灯104的其它配置包括多个滤波器114和/或反射器110(例如,设置在uv灯104的两侧)。由于滤波器114和反射器110被配置成根据需要联接到uv灯104和从uv灯104分离,因此能够根据需要配置uv灯104。
32.净化技术示例
33.图6是根据一些示例的用于利用净化设备的技术的处理流程图。图6的技术600是用于操作净化设备100的技术,如本文所述。
34.在602中,根据需要定向净化设备的uv灯。由于uv灯能够根据需要旋转、转动和/或延伸,因此净化设备的用户能够根据清洁操作的需要定位uv灯。因此,例如,用户能够定位uv灯,使得uv灯直接照射到表面上。在某些示例中,用户将uv灯定位在距表面推荐距离处。
35.另外,在604中,配置净化设备的uv灯。在某些示例中,uv灯的配置包括将uv灯设置到特定强度(例如,功率水平)、将一个或更多个滤波器联接到uv灯、和/或向uv灯配置一个或更多个反射器。例如,在某些应用中,反射器联接在uv灯的第一侧以将uv光反射到uv灯的第二侧。另选地或附加地,将滤波器联接到uv灯的第二侧以便将uv光发射滤波成期望波长的uv光发射。
36.基于602和604,在606中,激活净化设备。在某些示例中,净化设备的激活是通过一个或更多个用户接口(诸如开关按钮)的操作来进行的。然后在608中,根据需要操作净化设备以对表面进行消毒。因此,例如,净化设备被保持远离表面一定距离,以便利用uv光对表面进行消毒。
37.交通工具示例
38.在适用于此类其它背景的情况下,在如图7a所示的航天器维护和维修方法700以及如图7b所示的交通工具750的背景中描述了本公开的示例。
39.图7a例示了根据一些示例的交通工具生产和维修方法的示例的流程图。在一些示例中,在预生产期间,方法700包括交通工具750(例如,如图1所示的航天器)的规格和设计704以及材料采购606。在生产期间,进行交通工具750的部件和子组件制造708以及系统集成710。此后,交通工具750经历认证和交付712以便被投入服役714。在某些示例中,在进行服役时,交通工具750被安排进行维护和维修716(例如,改造、重构、翻新等)。
40.在某些示例中,方法700的各个过程由系统集成商、第三方和/或运营商(例如,客户)执行或进行。为了该说明的目的,系统集成商包括任何数量的飞机制造商和主系统分包商;第三方包括任何数量的承包商、分包商和供应商;并且在某些示例中,运营商包括航空
公司、租赁公司、军事实体、服务组织等。
41.图7b例示了根据一些示例的交通工具的示例的框图。如图7b所示,通过方法700生产的交通工具750(例如,航天器)包括具有多个系统720的机身718和内饰722。系统720的示例包括推进系统724、电气系统726、导航系统728和环境系统730中的一个或更多个系统。在各种示例中,交通工具750内还包括其它系统。尽管示出了航空示例,但是所描述的原理可以应用于其它工业,诸如汽车工业。
42.机器人示例
43.图8例示了根据一些示例的示例机器人的框图。图8例示了机器人200,机器人200被配置成在例如本文所述的交通工具中操作净化设备100。因此,在某些示例中,机器人200被配置成净化飞行器900。
44.在各种示例中,机器人200包括控制器202、末端执行器204和机器人传感器206。末端执行器204包括一个或更多个特征(诸如附接点),该一个或更多个特征被配置成抓握和/或联接到净化设备100。在某些示例中,末端执行器204还包括一个或更多个致动器或其它设备以移动末端执行器204和/或净化设备100。
45.机器人200和/或末端执行器204对净化设备100的操作由控制器202控制。在各种示例中,控制器202包括一个或更多个单核或多核处理器和存储器以存储用于操作净化设备100和/或末端执行器204的指令。在某些示例中,控制器202被配置成:识别待消毒的表面(例如,通过来自机器人200的机器人传感器206的数据,该机器人传感器206被配置成确定机器人200周围的环境),在待消毒表面的阈值距离内移动末端执行器204,和/或引导净化设备100以定位在难以到达的位置。
46.其它示例
47.此外,本公开包括根据以下条款的示例:
48.条款1.一种净化设备100,所述净化设备100包括:
49.设备主体102;以及
50.紫外线(uv)灯104,所述uv灯104包括:
51.uv光源108,所述uv光源108联接到所述设备主体102并且被配置成相对于所述设备主体102移动,其中,多个开口116被设置在所述uv光源108附近。
52.条款2.根据条款1所述的净化设备100,其中,所述uv灯104被配置成相对于所述设备主体102旋转、转动和/或延伸。
53.条款3.根据条款1所述的净化设备100,其中,所述uv灯104被配置成联接到反射器110。
54.条款4.根据条款3所述的净化设备100,所述净化设备100还包括所述反射器110,所述反射器110联接到所述uv灯104。
55.条款5.根据条款4所述的净化设备100,其中,所述uv灯104包括设置在第一侧150和第二侧152上的uv光源,其中,所述反射器110在所述第一侧150上联接到所述uv灯104,并且其中,所述反射器110被配置成将来自所述第一侧150的uv辐射朝着所述第二侧152反射。
56.条款6.根据条款5所述的净化设备100,其中,所述开口116被配置成允许所反射的uv辐射从所述第一侧150通过到所述第二侧152。
57.条款7.根据条款1所述的净化设备100,其中,所述uv灯104被配置成联接到滤波器
114。
58.条款8.根据条款7所述的净化设备100,所述净化设备100还包括所述滤波器114,所述滤波器114联接到所述uv灯104。
59.条款9.根据条款8所述的净化设备100,其中,所述滤波器114被配置成滤除波长比阈值波长长的uv辐射。
60.条款10.根据条款9所述的净化设备100,其中,所述阈值波长是240纳米。
61.条款11.根据条款7所述的净化设备100,其中,所述uv灯104被配置成在所述uv灯104的第一侧150联接到所述滤波器114并且被配置成在所述uv灯104的第二侧152联接到反射器110。
62.条款12.根据条款1所述的净化设备100,其中,所述uv光源108包括反射饰面。
63.条款13.根据条款1所述的净化设备100,其中,所述设备主体102包括把手112,并且所述净化设备100还包括电池106,所述电池106联接到所述设备主体102并被配置成为所述uv光源108供电。
64.条款14.根据条款13所述的净化设备100,其中,所述电池106被配置成与所述设备主体102分离。
65.条款15.一种机器人200,所述机器人200包括:
66.末端执行器204;以及
67.净化设备100,所述净化设备100联接到所述末端执行器204,其中,所述净化设备100包括:
68.设备主体102;以及
69.紫外线(uv)灯104,所述uv灯104包括:
70.uv光源108,所述uv光源108联接到所述设备主体102并且被配置成相对于所述设备主体102移动,其中,多个开口116被设置在所述uv光源108附近。
71.条款16.根据条款15所述的机器人200,所述机器人200还包括:
72.机器人传感器206,所述机器人传感器206被配置成感测机器人200附近的环境。
73.条款17.根据条款16所述的机器人200,所述机器人200还包括:
74.控制器202,所述控制器202被配置成从所述机器人传感器206接收数据并操作所述末端执行器204。
75.条款18.根据条款17所述的机器人200,其中,所述控制器202被配置成通过定位所述净化设备100来操作所述末端执行器204。
76.条款19.根据条款15所述的机器人200,其中,所述uv灯104被配置成相对于所述设备主体102旋转、转动和/或延伸。
77.条款20.根据条款15所述的机器人200,所述机器人200还包括:
78.滤波器114,所述滤波器114联接到所述uv灯104的第一侧150;以及
79.反射器110,所述反射器110联接到所述uv灯104的第二侧152。
80.结论
81.尽管出于清楚理解的目的已经详细描述了前述概念,但是将显而易见的是,可以在所附权利要求的范围内进行某些改变和修改。应该注意的是,存在实现的过程、系统和设备的许多另选方式。因此,本示例应被认为是例示性的而非限制性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。