1.本发明属于结合车辆检测控制技术的自动驾驶导航路径规划领域,具体涉及一种车辆掉头可行性检测方法及装置。
背景技术:
2.无人驾驶车辆是未来智能车辆的发展趋势之一,无人驾驶车辆的研究也将推动智能交通和智慧城市的发展,具有重大意义。特别是利用地图、自车位置、目标检测等信息的自动驾驶车辆的行车线路预判、规划与导航等技术是目前研究的热点。
3.基于此类技术方法,在自动驾驶、辅助驾驶与智能交通环境下,如何根据车身信息、道路信息,提前预判道路的掉头属性是急需解决的问题。一般情况下车辆掉头比车辆左转、右转、或者直行花费的时间更多,驾驶难度更大。若随意掉头,不仅威胁到路面上行人的人身安全,还可能会与行驶的其他车辆发生剐蹭,也可能撞上两条相向行驶道路之间的隔离带,造成交通不畅的同时威胁他人及自身的安全。
4.申请公布号为cn111174802a的中国发明专利公开了一种路口的掉头难度确定方法,该方法根据进入道路和退出道路的道路属性,确定掉头路径允许车辆掉头的路面宽度,根据路面宽度和车辆的长度确定可掉头路口的掉头难度,车辆长度越长,掉头难度越大,路面宽度越大,掉头难度越小。该方法只考虑车辆的长度,只根据车辆长度来对掉头难度进行判断,但实际车辆是一个多边形物体,按照该方法的思路,当路面宽度与车辆长度基本相等时,掉头难度较大,但实际情况是路面宽度刚好容纳车辆长度时,车辆根本无法进行掉头操作,路面需要预留有一定宽度才能保证车辆完成转弯操作,进而实现掉头。故仅根据车辆长度来对掉头能力进行检测将不准确,无法保证车辆一定能够完成掉头通行。
技术实现要素:
5.本发明提供了一种车辆掉头可行性检测方法及装置,用以解决仅根据车辆长度来对掉头能力进行检测将不准确,无法保证车辆一定能够完成掉头通行的问题。
6.为解决上述技术问题,本发明的技术方案包括:
7.本发明提供了一种车辆掉头可行性检测方法,包括如下步骤:
8.当车辆前方为允许掉头的路口时,确定后轴所在直线上距离后轴中心最小转弯半径r
min
的点,该点为车辆以最小转弯半径r
min
进行掉头时的圆心;
9.确定圆心与车头上距离该圆心最远的点的第一距离r2,所述第一距离r2为车辆掉头时车头上距离该圆心最远的点扫过圆弧区域的半径;确定圆心与车尾上距离该圆心最远的点的距离r3,所述第二距离r3为车辆掉头时车尾上距离该圆心最远的点扫过圆弧区域的半径;
10.根据第一距离r2和第二距离r3,确定车辆以最小转弯半径进行掉头时车体轮廓扫过道路的横向最大宽度turn_width;根据第一距离r2,确定车辆以最小转弯半径进行掉头时车体轮廓扫过道路的纵向最大长度turn_height;其中,横向为沿着车宽方向延伸的方
向,纵向为沿着车长方向延伸的方向;
11.若横向最大宽度turn_width小于道路最大掉头宽度road_width且纵向最大长度turn_height小于道路最大掉头长度cross_height,则确定车辆可掉头。
12.上述技术方案的有益效果为:本发明将车辆看作是一个多边形物体,假设车辆以最小转弯半径进行掉头运动,根据车辆自身的一些信息,可确定车辆以最小转弯半径r
min
进行掉头时的圆心,结合车头上距离圆心最远的点以及车尾上距离圆心最远的点,便可确该种运动情况下车体轮廓扫过的道路的横向最大宽度和纵向最大长度,即车辆以最节省占地空间的最小转弯半径圆弧方式通行时所占用的宽度和长度,再与客观道路信息进行比较,包括道路最大掉头宽度、以及道路最大掉头长度等信息,根据比较结果便可自动判断车辆是否可掉头。该方法将车辆的长度和宽度均考虑在内,结合车辆的自身信息和客观道路信息,简单且准确判断针对某种车型的道路掉头属性,以方便规划出更合理且更高效的导航线路路线,为后续自动驾驶导航路径规划提供支持,避免规划出掉头路径、但车身过长、实际无法通过的情况出现。
13.作为方法的进一步改进,为了简单准确得到第一距离r2,根据车辆的最小转弯半径r
min
、车身宽度car_width、车头到后轴距离backaxle_2_car_head,确定所述第一距离r2:
[0014][0015]
作为方法的进一步改进,为了简单准确得到第二距离r3,根据车辆的最小转弯半径r
min
、车身宽度car_width、以及车尾到后轴的距离backaxle_2_car_tall,确定所述第二距离r3:
[0016][0017]
作为方法的进一步改进,为了保证车辆安全可靠掉头,所述横向最大宽度turn_width为:
[0018]
turn_width=r2 r3 diff
[0019]
式中,diff为预设的缓冲距离。
[0020]
作为方法的进一步改进,为了保证车辆安全可靠掉头,所述纵向最大长度turn_height为:
[0021]
turn_height=r2 diff
[0022]
式中,diff为预设的缓冲距离。
[0023]
作为方法的进一步改进,通过检测禁止左转标志、禁止掉头标志、双黄线和/或隔离带来确定车辆前方是否为允许掉头的路口。
[0024]
作为方法的进一步改进,在确定车辆可掉头后,在车辆的地图上对该路口进行标记,以标记该路口为可掉头的路口,便于车辆位于此条道路进行路径规划时规划出调头的导航线路。
[0025]
本发明还提供了一种车辆掉头可行性检测装置,包括存储器和处理器,所述处理器用于执行存储在存储器中的指令以实现上述介绍的车辆掉头可行性检测方法,并达到与该方法相同的效果。
附图说明
[0026]
图1是十字路口示意图;
[0027]
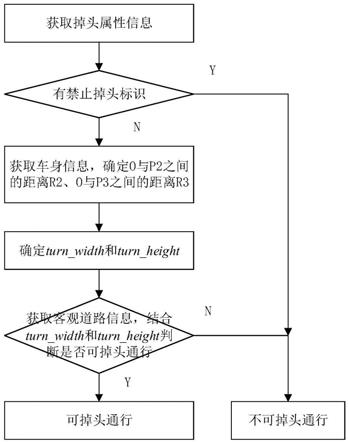
图2是本发明的车辆掉头可行性检测方法的流程图;
[0028]
图3是本发明的车辆以最小转弯半径进行圆弧式掉头运动时车体轮廓扫过的道路以及相关参数的示意图;
[0029]
图4是可转向路口示意图;
[0030]
图5是本发明的车辆掉头检测装置的结构图。
具体实施方式
[0031]
下面结合附图和实施例,对本发明的一种车辆掉头可行性检测方法和一种车辆掉头可行性检测装置进行详细说明。
[0032]
方法实施例:
[0033]
本实施中将车辆的轮廓看作是一个矩形,如图3所示,其四个顶点分别为p1、p2、p3和p4。
[0034]
本发明的车辆掉头方法的实现可在整车控制器中进行,整车控制器接收的信息包括车辆自身信息、客观道路信息、以及调头属性信息。其中:
[0035]
车辆自身信息包括最小转弯半径r
min
、车身宽度car_width、车头到后轴距离backaxle_2_car_head、以及车尾到后轴的距离backaxle_2_car_tall。
[0036]
客观道路信息包括道路最大掉头宽度road_width、以及道路最大掉头长度cross_height。此处的road_width和cross_height是路口的固有属性,一般地图模块会直接给出此信息。一般来说,road_width是左转或者掉头车道到最左侧车道线之间距离,cross_height是一个路口的纵向长度信息。例如,如图1所示,车辆处于交叉路口,为四车道中的车道3中,车道3和车道4为向前行驶车辆(图1中的往上行驶车道),车道1和车道2为向后行驶车辆(图1中为往下行驶车道),道路最大掉头长度cross_height和道路最大掉头宽度road_width分别如图1中箭头指示长度和宽度所示。
[0037]
掉头属性信息包括与掉头有关的道路标识,可为禁止调头标识、双黄线标识、隔离带标识、实线标识等。根据这些道路标识信息可判断车辆所处的位置是否处于可掉头位置。
[0038]
整车控制器根据这些信息综合计算、处理,可以判断车辆(自车)是否可掉头,即实现本发明的一种车辆掉头可行性检测方法,其流程如图2所示,步骤如下:
[0039]
步骤一,通过高精度地图,检测道路末端是否有与掉头有关的道路标识,原则上只要没有禁止左转、禁止掉头标识、双黄线、隔离带等,理论上是可以掉头通行的,但具体到某一车辆实际是否可以掉头通行,还需执行步骤二进行进一步的判断;否则,说明此时车辆不可掉头,原则上不能掉头通行。
[0040]
步骤二,当此条道路允许掉头通行时,需要进一步检测道路环境是否能够满足针对某种车型的最小掉头占地区域。车辆以最小转弯半径r
min
(圆心为o)做圆弧运动占用的空间最小,此时假设车辆调头以r
min
为半径做圆弧式掉头运动。车辆以最小转弯半径r
min
进行圆弧式掉头运动时,车辆右侧的两个顶点p2、p3扫过的圆弧区域最大,假设其运动半径分别为r2、r3,则:
[0041][0042][0043]
式中,r2、r3也分别为车辆以最小转弯半径进行圆弧式掉头运动时的圆心o与顶点p2的距离、车辆以最小转弯半径进行圆弧式掉头运动时的圆心o与顶点p3的距离。p2也为车头上距离圆心o最远的点,p3也为距离车尾上距离圆心o最远的顶点。
[0044]
故基于上式,可根据车辆的最小转弯半径r
min
、车身宽度car_width、以及车头到后轴距离backaxle_2_car_head,确定r2;根据车辆的最小转弯半径r
min
、车身宽度car_width、以及车尾到后轴的距离backaxle_2_car_tall,确定r3。
[0045]
步骤三,根据圆心o与p2的距离r2、圆心o与p3的距离r3、以及预设的缓冲距离diff,确定车辆以最小转弯半径r
min
进行圆弧式掉头运动时车体轮廓扫过的道路的横向最大宽度turn_width;根据圆心o与p2的距离r2、以及预设的缓冲距离diff,确定车辆进行圆弧运动时车体轮廓扫过的道路的纵向最大长度turn_height。公式分别如下:
[0046]
turn_width=r2 r3 diff
[0047]
turn_height=r2 diff
[0048]
理论上横向最大宽度turn_width为r2和r3的和,纵向最大长度turn_height为r2,但为了保证车辆的安全可靠通行,故这里给车辆预留一定的缓冲距离diff,具体设置多少可根据实际情况设定。
[0049]
步骤四,将横向最大宽度turn_width与道路最大掉头宽度road_width进行比较,将纵向最大长度turn_height与道路最大掉头长度cross_height进行比较,以确定车辆是否可掉头:
[0050]
若turn_width<road_width且turn_height<cross_height,则道路条件满足车辆调头行为范围限制,确定车辆可掉头;
[0051]
若turn_width≥road_width或者turn_height≥cross_height,则道路条件不满足车辆调头行为范围限制,禁止调头。
[0052]
步骤五,在确定该路口可掉头后,可在该车辆的地图上进行标记,说明对于该车辆来说,该路口为可掉头的路口。从而车辆在进行路径规划时,可规划出掉头路径,为后续自动驾驶导航路径规划提供支持。在标记好后,对于该种类型的车辆,以后在经过该路口时,无需再进行判断,直接根据标记信息便可知道该路口是否可掉头。
[0053]
当然,当车辆的类型发生变化时,车身长度、宽度、最小转弯半径等车辆自身信息会发生变化,此时需要根据上述计算过程重新进行计算,以判断新类型的车辆能否掉头通过,并在确定可掉头通行时,在该新类型车辆的地图上进行标记。
[0054]
本发明将车辆的长度和宽度均考虑在内,结合车辆的自身信息和客观道路信息,简单且准确判断该条道路是否可使车辆掉头通过。
[0055]
需说明的是,本发明的方法不一定在十字路口进行掉头检测,在一些可掉头的路口也可采用本发明的方法进行掉头检测,例如如图4所示的路口,此时道路最大掉头宽度road_width和道路最大掉头长度cross_height需根据该道路的实际情况确定。
[0056]
装置实施例:
[0057]
该实施例提供了一种车辆掉头检测装置,如图5所示,包括存储器、处理器和内部总线,处理器、存储器之间通过内部总线完成相互间的通信。
[0058]
处理器可以为整车中的整车控制器,还可为整车中的除整车控制器外的其他微处理器mcu、可编程逻辑器件fpga等处理装置。
[0059]
存储器可为利用电能方式存储信息的各式存储器,ram、rom等;利用磁能方式存储信息的各式存储器,例如硬盘、软盘、磁带、磁芯存储器、磁泡存储器、u盘等;利用光学方式存储信息的各式存储器,例如cd、dvd等。当然,还有其他方式的存储器,例如量子存储器、石墨烯存储器等。
[0060]
处理器可以调用存储器中的逻辑指令,以实现一种车辆掉头可行性检测方法。在方法实施例中对该方法做了详细介绍。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。