1.本发明实施例涉及图形可视化技术领域,尤其涉及一种路径轨迹显示方法、装置、电子设备及存储介质。
背景技术:
2.随着信息产业的发展,人们的生活进入大数据时代,对海量信息的分析、处理、计算用常规的方案已经不适用,需要借助算法,然而算法不能直观、形象的展示,从而给日常的生活带来便利。用传统的可视化,不能准确的模拟出复杂的轨迹,在某些交叉点可能存在视觉上的误读。比如双向a地址-b地址-a地址-c地址这种有向路径的模拟等,当元素多的时候,就会显得很混乱,无法分辨出路径,存在节点重叠、关系交叉等典型问题。本发明基于实际生活场景,利用算法和javascript库将走迷宫、到达指定地点路径等,通过模拟显示达到直接运用于生活中的目的,解决了现有技术中进行路径显示时无法分辨出路径,存在节点重叠、关系交叉等典型问题。
技术实现要素:
3.本发明实施例提供一种路径轨迹显示方法、装置、电子设备及存储介质,以实现进行路径显示时能够直观的显示路径。
4.第一方面,本发明实施例提供了一种路径轨迹显示方法,该方法包括:
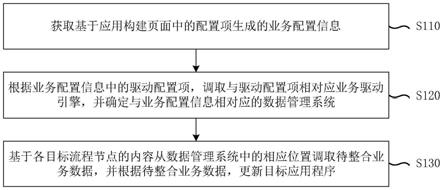
5.获取电子地图数据,根据所述电子地图数据确定路径拐点和所述拐点的坐标;
6.针对路径相连的相邻拐点的坐标,计算拐点之间的路径距离和路径角度;
7.根据所述拐点的坐标,在路径轨迹图中绘制并显示拐点图标;
8.根据所述路径距离和路径角度,在所述路径轨迹图中绘制并显示相邻拐点之间的线条图标。
9.第二方面,本发明实施例还提供了一种路径轨迹显示装置,所述装置包括:
10.拐点获取模块,用于获取电子地图数据,根据所述电子地图数据确定路径拐点和所述拐点的坐标;
11.路径计算模块,用于针对路径相连的相邻拐点的坐标,计算拐点之间的路径距离和路径角度;
12.拐点显示模块,用于根据所述拐点的坐标,在路径轨迹图中绘制并显示拐点图标;
13.轨迹图显示模块,用于根据所述路径距离和路径角度,在所述路径轨迹图中绘制并显示相邻拐点之间的线条图标。
14.第三方面,本发明实施例还提供了一种电子设备,所述电子设备包括:
15.一个或多个处理器;
16.存储装置,用于存储一个或多个程序,
17.当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现所述的路径轨迹显示方法。
driven documents(数据驱动文档),并且它被称为一个互动和动态的数据可视化库网络。
34.示例性的,如图2b所示,节点a、b、c、d、e的坐标为a(50,50)、b(150,400)c(350,300)、d(450,200)、e(150,150);那么节点a与节点b的边长为364,计算方式为(b横坐标-a的横坐标)2与(b的纵坐标-a的纵坐标)2求和后的平方根,其它类推。按上述算法依次算出b、c、d、e的边长。假设路径角度为a,那么路径角度a计算方式分为如下2种情况:第一种当节点a在节点b的左边时,路径角度为a=asin((b纵坐标-a纵坐标)/边长)*180/pi。第二种当a拐点在b拐点的右边时,路径角度a=asin((b纵坐标-a纵坐标)/边长)*180/pi。如果a》0,则a=a 180,如果a《0,则a=a-180。
35.步骤130、根据所述拐点的坐标,在路径轨迹图中绘制并显示拐点图标;
36.其中,所述拐点的坐标可以是根据电子地图数据确定;将每个拐点抽象成图形中实心的球形节点在路径轨迹图中绘制并显示。
37.步骤140、根据所述路径距离和路径角度,在所述路径轨迹图中绘制并显示相邻拐点之间的线条图标。
38.其中,所述路径距离为相邻拐点之间的长度,通过计算后节点横坐标和前节点横坐标之差,与后节点纵坐标和前节点纵坐标之差,求和后的平方根得到;所述路径角度通过计算后节点纵坐标和前节点纵坐标之差,与所述路径距离值之商的反正弦值,再乘以180/pi作为所述路径角度。所述线条图标为相邻拐点之间的距离。
39.本实施例的技术方案,通过获取电子地图数据,根据所述电子地图数据确定路径拐点和所述拐点的坐标;针对路径相连的相邻拐点的坐标,计算拐点之间的路径距离和路径角度;根据所述拐点的坐标,在路径轨迹图中绘制并显示拐点图标;根据所述路径距离和路径角度,在所述路径轨迹图中绘制并显示相邻拐点之间的线条图标,解决了现有技术中进行路径显示时无法分辨出路径,存在节点重叠、关系交叉等典型问题,实现了进行路径显示时能够直观的显示路径,通过路径轨迹显示达到直接运用于生活中的目的。
40.可选的,计算拐点之间的路径距离和路径角度之后,还包括:
41.将所述拐点作为节点进行存储,并以所述节点的标识为索引,对应存储相邻列表数组;其中,所述相邻列表数组用于存储相邻节点对应的拐点。
42.其中,所述相邻列表数组中的每个节点对应存储的内容包括如下至少一项:节点名称、拐点横坐标和拐点纵坐标。在我们生活中的大部分场景中,非稠密图的标准表示更适合,我们使用一个以节点为索引的列表数组,其中的每个元素都是和该节点相邻的节点列表。这种数据结构在可能碰到各种类型的图能预留出足够的空间(极端情况是邻接矩阵),查询邻边也不用扫描所有的节点(极端情况是边的数组)。
43.这样设置的好处在于通过采用以节点为索引的列表数组的数据结构,更便于统计节点信息,为绘制路径规划图打好基础。
44.实施例二
45.图2a为本发明实施例二提供的一种路径轨迹模拟显示方法中的流程图,本实施例在上述各实施例的基础上,优选是,还包括获取路径规划请求;其中,所述路径规划请求中包括源点和目标点的坐标;根据所述源点和目标点的坐标,采用深度优先搜索算法,从起点开始访问所有深度遍历路径;根据所述路径规划请求中的规划条件,从遍历确定的候选路径中确定目标规划路径。本实施例的方法包括:
46.s210、获取路径规划请求;其中,所述路径规划请求中包括源点和目标点的坐标;
47.在本实施例中,路径规划请求可以响应用户对路径的选择操作,其中所述路径规划请求中包括源点和目标点的坐标;
48.s220、根据所述源点和目标点的坐标,采用深度优先搜索算法,从起点开始访问所有深度遍历路径;
49.在本实施例中,采用深度优先搜索算法,从起点开始访问所有深度遍历路径;深度优先搜索的主要思想是:1、首先以一个未被访问过的节点作为起始节点,沿当前节点的边走到未访问过的节点;2、当没有未访问过的节点时,则回到上一个节点,继续试探别的节点,直至所有的节点都被访问过。
50.示例性的,以图2b为例:我们假定图本身是有向的,起点a可以到达b用a
→
b表示,上图的边的有向表示为:a
→
b,b
→
c,c
→
d,d
→
e,c
→
e,e
→
d,b
→
e,e
→
c。从起点到达终点的路径使用paths数组存放,初始为空数组。以javascript语法为例来说明整个计算过程。初始空数组var paths=[]。
[0051]
第一步访问a之后,接下来访问以a为起点的点b。接下来访问以b为起点的点(包含c、e),我们按照字母顺序访问点c(也可以按照其它顺序)。接下来访问以c为起点的点(包含d、e),我们按照字母顺序访问点d到达终点。此时经过的点计算过程为:
[0052]
paths.push(
‘
a’),paths.push(
‘
b’),paths.push(
‘
c’),paths.push(
‘
d’)。
[0053]
此时a-b-c-d路径长度为364 224 141=729。
[0054]
回到上一个顶点c(用pop语法实现,从数组头部删除c),继续试探e,以e为起点的点包含d到达终点。此时经过的点计算过程为:
[0055]
paths.pop(),paths.push(
‘
e’),paths.push(
‘
d’)。此时a-b-c-e-d路径长度为364 224 250 304=1142。
[0056]
回到上一个顶点e,其它可达顶点均已被访问。继续回到上一个顶点c,其它可达顶点均已被访问。继续回到上一个顶点b,以b为起点的另一个未访问的顶点为e,以e为起点的顶点为c、d。按字母顺序先访问c点,以c为起点的顶点为d到达终点,此时经过的点计算过程:paths.pop(),paths.pop(),paths.push(
‘
e’),paths.push(
‘
c’),paths.push(
‘
d’)。此时a-b-e-c-d路径长度为364 250 250 141=1005。
[0057]
回到上一个顶点e,访问未被访问的点d到达终点,此时经过的点计算过程为:paths.pop(),,paths.push(
‘
d’)。此时a-b-e-d路径长度为364 250 304=918。
[0058]
s230、根据所述路径规划请求中的规划条件,从遍历确定的候选路径中确定目标规划路径。
[0059]
其中,所述规划条件可以是系统选择或是用户根据自己需求自行设置的。所述候选路径可以是遍历得到的所有路径;所述目标规划路径可以是根据设置规划条件生成的最终规划路径,如目标规划路径为最短路径等;采用深度优先搜索算法,从起点开始访问所有深度遍历路径;根据前文示例,当目标规划路径为最短路径则是通过比较上面每次走过的路径长度,只保留最小值来实现。具体实现:
[0060]
最短路径长度minway初始设置为无限大,每次遍历到达终点时的路径长度为curway与minway进行比较,curway<minway则设置minway=curway,最后得到最短路径为a-b-c-d。
[0061]
在上述各个实施例的基础上,在车辆行驶的过程中,还包括:根据所述车辆的当前坐标,确定车辆图标在所述路径轨迹图中的位置;根据所述车辆所在路径的路径角度和行驶方向,确定对应的车辆图标和车辆图标显示角度;根据所述车辆图标的位置和显示角度,在所述路径轨迹图中绘制并显示所述车辆图标;根据所述车辆的当前坐标重复更新所述车辆图标在路径轨迹图中的显示位置。
[0062]
其中,所述车辆图标的显示角度包括至少两个。本实施例中可以将车辆作为模拟的对象,从起点出发,按照最短路径经过的顶点连接的边,将边依次标红,车会按照边的轨迹模拟行驶,模拟的方式为,车头的正向为行进的方向,车轮经过的位置为边的位置。
[0063]
为保证车身方向,行进路径满足上述条件,需要做如下工作:
[0064]
(1)旋转:车身旋转的角度计算分为4种情况,假设a向b点行驶:
[0065]
①
向下垂直,旋转90度
[0066]
②
向上垂直,旋转270度
[0067]
③
b在a点左下方或右上方,旋转度数为(math.atan(垂直边长/水平长度)/math.pi)*180;
[0068]
④
b在a点左上方或右下方,旋转度数为360-(math.atan(垂直边长/水平长度)/math.pi)*180;
[0069]
(2)平移:
[0070]
车身在垂直方向需进行位置调整来满足轮子与边线保持在一条线上,位置在垂直方向向下移动四分之三个车身高度。
[0071]
(3)图标替换:
[0072]
为保证车辆向任意方向行驶车头都是正确的方向,除了(1)中的旋转处理,还需要对图标进行替换才能满足。例如:
[0073]
向右行驶采用图标如图2c所示。
[0074]
向左行驶采用图标如图2d所示。
[0075]
其中,车身的行进模拟采用svg中的《animatetransform》标签,需要变更的属性为transform,起点from设置为:0 0,目标点to设置为:x方向的跨度y方向的跨度。
[0076]
本实施例的技术方案,通过获取路径规划请求;其中,所述路径规划请求中包括源点和目标点的坐标;根据所述源点和目标点的坐标,采用深度优先搜索算法,从起点开始访问所有深度遍历路径;根据所述路径规划请求中的规划条件,从遍历确定的候选路径中确定目标规划路径。解决了现有技术中进行路径显示时无法分辨出路径,存在节点重叠、关系交叉等典型问题,实现了进行路径显示时能够直观的显示路径,并根据路径规划请求中的规划条件,从遍历确定的候选路径中确定目标规划路径,通过路径显示达到直接运用于生活中的目的。
[0077]
实施例三
[0078]
本发明实施例所提供的路径轨迹显示装置可执行本发明任意实施例所提供的路径轨迹显示方法,具备执行方法相应的功能模块和有益效果。
[0079]
如图3所示,该路径轨迹显示装置包括:拐点获取模块31、路径计算模块32、拐点显示模块33和轨迹图显示模块34;
[0080]
拐点获取模块31,用于获取电子地图数据,根据所述电子地图数据确定路径拐点
和所述拐点的坐标;
[0081]
路径计算模块32,用于针对路径相连的相邻拐点的坐标,计算拐点之间的路径距离和路径角度;
[0082]
拐点显示模块33,用于根据所述拐点的坐标,在路径轨迹图中绘制并显示拐点图标;
[0083]
轨迹图显示模块34,用于根据所述路径距离和路径角度,在所述路径轨迹图中绘制并显示相邻拐点之间的线条图标。
[0084]
本实施例的技术方案,该装置通过拐点获取模块31获取电子地图数据,根据所述电子地图数据确定路径拐点和所述拐点的坐标;通过路径计算模块32针对路径相连的相邻拐点的坐标,计算拐点之间的路径距离和路径角度;通过拐点显示模块33根据所述拐点的坐标,在路径轨迹图中绘制并显示拐点图标;通过轨迹图显示模块34根据所述路径距离和路径角度,在所述路径轨迹图中绘制并显示相邻拐点之间的线条图标,解决了现有技术中进行路径显示时无法分辨出路径,存在节点重叠、关系交叉等典型问题,实现了进行路径显示时能够直观的显示路径,通过路径轨迹显示达到直接运用于生活中的目的。
[0085]
进一步地,路径轨迹显示装置,还包括:
[0086]
节点存储模块,用于在计算拐点之间的路径距离和路径角度之后,将所述拐点作为节点进行存储,并以所述节点的标识为索引,对应存储相邻列表数组;其中,所述相邻列表数组用于存储相邻节点对应的拐点。
[0087]
其中,所述相邻列表数组中的每个节点对应存储的内容包括如下至少一项:节点名称、拐点横坐标和拐点纵坐标。
[0088]
进一步的,所述路径计算模块32,具体用于:
[0089]
针对路径相连的相邻拐点的坐标,计算后节点横坐标和前节点横坐标之差,与后节点纵坐标和前节点纵坐标之差,求和后的平方根,作为所述路径距离;
[0090]
针对路径相连的相邻拐点的坐标,计算后节点纵坐标和前节点纵坐标之差,与所述路径距离值之商的反正弦值,再乘以180/pi作为所述路径角度。
[0091]
基于上述技术方案,路径轨迹显示装置,还可以包括:
[0092]
路径规划请求获取模块,用于获取路径规划请求;其中,所述路径规划请求中包括源点和目标点的坐标;
[0093]
路径搜索模块,用于根据所述源点和目标点的坐标,采用深度优先搜索算法,从起点开始访问所有深度遍历路径;
[0094]
目标规划路径确定模块,用于根据所述路径规划请求中的规划条件,从遍历确定的候选路径中确定目标规划路径。
[0095]
基于上述技术方案,路径轨迹显示装置,还包括:
[0096]
车辆模拟模块,用于在车辆行驶的过程中,根据所述车辆的当前坐标,确定车辆图标在所述路径轨迹图中的位置;根据所述车辆所在路径的路径角度和行驶方向,确定对应的车辆图标和车辆图标显示角度;根据所述车辆图标的位置和显示角度,在所述路径轨迹图中绘制并显示所述车辆图标;根据所述车辆的当前坐标重复更新所述车辆图标在路径轨迹图中的显示位置。
[0097]
其中,所述车辆图标的显示角度包括至少两个。
[0098]
上述路径轨迹显示装置可执行本发明任意实施例所提供的路径规划显示方法,具备执行方法相应的功能模块和有益效果。
[0099]
实施例四
[0100]
图4为本发明实施例四提供的一种电子设备结构示意图,如图4所示,该电子设备包括:处理器40、存储器41、输入装置42和输出装置43;电子设备中处理器40的数量可以是一个或多个,图4中以一个处理器40为例;电子设备中的处理器40、存储器41、输入装置42和输出装置43可以通过总线或其他方式连接,图4中以通过总线连接为例。
[0101]
存储器41作为一种计算机可读存储介质,可用于存储软件程序、计算机可执行程序以及模块,如本发明实施例中的路径轨迹显示方法对应的程序指令/模块(例如,路径轨迹显示装置中的拐点获取模块31、路径计算模块32、拐点显示模块33和轨迹图显示模块34)。处理器70通过运行存储在存储器71中的软件程序、指令以及模块,从而执行设备/终端/服务器的各种功能应用以及数据处理,即实现上述的路径轨迹显示方法。
[0102]
存储器71可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序;存储数据区可存储根据终端的使用所创建的数据等。此外,存储器71可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他非易失性固态存储器件。在一些实例中,存储器71可进一步包括相对于处理器70远程设置的存储器,这些远程存储器可以通过网络连接至设备/终端/服务器。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
[0103]
输入装置42可用于获取电子地图数据,确定路径拐点和所述拐点的坐标;以及产生与电子设备的路径规划中绘制并显示相邻拐点之间的线条图标。输出装置43可包括显示屏等显示设备。
[0104]
实施例五
[0105]
本发明实施例五还提供一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行一种路径轨迹显示方法,该方法包括:
[0106]
获取电子地图数据,根据所述电子地图数据确定路径拐点和所述拐点的坐标;
[0107]
针对路径相连的相邻拐点的坐标,计算拐点之间的路径距离和路径角度;
[0108]
根据所述拐点的坐标,在路径轨迹图中绘制并显示拐点图标;
[0109]
根据所述路径距离和路径角度,在所述路径轨迹图中绘制并显示相邻拐点之间的线条图标。当然,本发明实施例所提供的一种包含计算机可执行指令的存储介质,其计算机可执行指令不限于如上所述的方法操作,还可以执行本发明任意实施例所提供的路径规划显示方法中的相关操作.
[0110]
通过以上关于实施方式的描述,所属领域的技术人员可以清楚地了解到,本发明可借助软件及必需的通用硬件来实现,当然也可以通过硬件实现,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如计算机的软盘、只读存储器(read-only memory,rom)、随机存取存储器(random access memory,ram)、闪存(flash)、硬盘或光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例所述的方法。
[0111]
值得注意的是,上述搜索装置的实施例中,所包括的各个单元和模块只是按照功
能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
[0112]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。