技术特征:
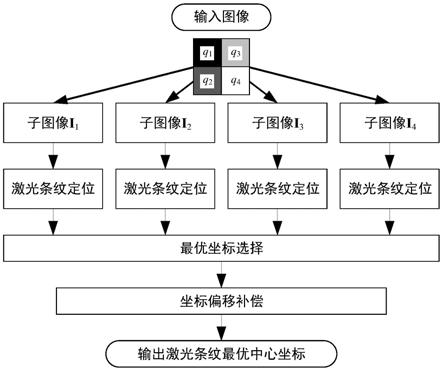
1.一种基于单帧图像的高动态范围激光三维扫描方法,其特征是:每次扫描时,使用具有像素级滤波器阵列的图像传感器采集单帧激光条纹图并分解为多个子图像;对每个子图像并行使用激光条纹定位算法合成最优中心坐标;以激光条纹的最优中心坐标进行三维点云重构,实现高动态范围的激光三维扫描。2.根据权利要求1所述的基于单帧图像的高动态范围激光三维扫描方法,其特征是:所述像素级滤波器阵列为相邻像素存在透射率变化的周期分布,包括2
×
2和3
×
3的周期结构。3.根据权利要求1所述的基于单帧图像的高动态范围激光三维扫描方法,其特征是:所述像素级滤波器阵列为彩色图像传感器中的拜耳滤光片。4.根据权利要求1所述的基于单帧图像的高动态范围激光三维扫描方法,其特征是:所述分解为多个子图像,是将单帧激光条纹图分解为具有不同亮度的多个子图像,每个子图像直接进行激光条纹定位并从定位结果中选择最优坐标;而不是将子图像合成为一帧高动态范围图像后再进行激光条纹定位。5.根据权利要求1所述的基于单帧图像的高动态范围激光三维扫描方法,其特征是:所述最优中心坐标的选择依赖于定位算法输出的与图像亮度、对比度、信噪比相关的定位参数;通过分析定位参数与定位精度之间的正或负相关性,即根据最大或最小参数来确定最优中心坐标。6.根据权利要求1所述的基于单帧图像的高动态范围激光三维扫描方法,其特征是:所述激光条纹定位算法,是:首先根据滤波器阵列的周期分布,将单帧输入图像分解为具有不同平均亮度的子图像;然后对每个子图像使用相同的激光条纹定位算法进行中心定位;根据速度和精度的需求选择已知的定位算法,通过分析定位参数与定位精度之间的正或负相关性,从多个子图像的定位结果中选择最优的激光条纹中心坐标;考虑分解子图像时引入的坐标偏移,合成最优坐标时应对坐标偏移进行对应补偿,最终输出整个激光条纹的高动态范围最优中心坐标。
技术总结
一种基于单帧图像的高动态范围激光三维扫描方法,每次扫描时使用具有像素级滤波器阵列的图像传感器采集单帧激光条纹图并分解为多个子图像,对每个子图像并行使用激光条纹定位算法合成最优中心坐标,以激光条纹的最优中心坐标进行三维点云重构,实现高动态范围的激光三维扫描。该方法利用图像传感器中的像素级滤波器阵列并行实现不同比例的光强衰减,通过牺牲空间分辨率来换取时间效率,实现基于单帧图像的高动态范围激光三维扫描,可以显著减少采集激光条纹图像所需的时间,降低对相机采集帧速的要求,实现更快速地激光三维扫描。实现更快速地激光三维扫描。实现更快速地激光三维扫描。
技术研发人员:殷永凯 梁叶 王玉荣
受保护的技术使用者:山东大学
技术研发日:2021.10.28
技术公布日:2022/1/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。