1.本实用新型涉及康复器械技术领域,尤其涉及一种胳膊屈伸锻炼器。
背景技术:
2.骨折困扰很多人,术后面临的问题是康复锻炼,锻炼不及时,会导致关节僵硬,屈伸困难。
3.目前,现有的胳膊屈伸锻炼设备一般体型较大,并不便携且多需要用电驱动,难以放置在患者的家中,因此对想要减轻住院成本的患者来说回到家就意味着无法轻松进行胳膊的屈伸锻炼。
4.因此,有必要提供一种胳膊屈伸锻炼器解决上述技术问题。
技术实现要素:
5.本实用新型的目的是解决现有技术中存在的缺点,而提出的一种胳膊屈伸锻炼器。
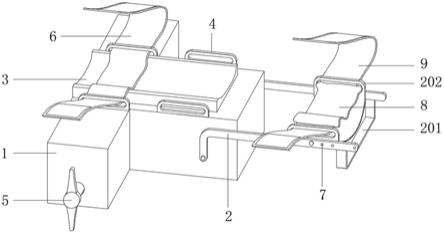
6.为解决上述技术问题,本实用新型提供的一种胳膊屈伸锻炼器,包括壳体,所述壳体的顶端中侧设置有大臂限位组件,所述壳体的一侧转动连接有小臂支架,所述小臂支架的内侧设置有小臂限位组件,所述小臂支架的两端均开设有多个调位孔,所述壳体的内顶侧设置有传动组件。
7.优选的,所述大臂限位组件包括海绵垫、大臂绑带,所述海绵垫固定连接于壳体的顶端中侧所述海绵垫两侧均设置有多个大臂绑带架,且大臂绑带架固定连接于壳体的顶端,所述大臂绑带位于海绵垫的顶侧,所述大臂绑带的两侧分别嵌设于两个大臂绑带架的内侧。
8.优选的,所述小臂限位组件包括小臂护托、限位托架,所述小臂护托设置于小臂支架的内侧,所述小臂护托的两端均缝合有小臂绑带,两个所述小臂绑带靠近小臂支架的位置共同套设有小臂绑带架,且小臂绑带架与相邻的调位孔之间转动连接,所述限位托架固定连接于小臂支架的底端远离壳体的一侧。
9.优选的,所述传动组件包括第一固定架、第二固定架,所述第一固定架固定连接于壳体的内顶端远离小臂支架的一侧,所述第一固定架的内侧转动连接有双向丝杆,所述双向丝杆的两侧均螺纹连接有伸缩螺母,两个所述伸缩螺母均转动连接有支撑架,两个所述支撑架远离伸缩螺母的一端均固定连接有限位齿轮,且两个限位齿轮之间啮合连接,两个限位齿轮的外侧共同转动连接有连接片,所述连接片远离双向丝杆的一端中间位置固定连接有传动曲杆,所述第二固定架固定连接于壳体的内顶端靠近小臂支架的一侧,所述第二固定架的两端均转动连接有小臂轴,且小臂轴延伸至壳体的外侧并与小臂支架之间固定连接,两个所述小臂轴远离小臂支架的一端均固定连接有臂轴支架,两个所述臂轴支架共同固定连接有连接件,且连接件与传动曲杆之间转动连接。
10.优选的,所述双向丝杆的两端均延伸至壳体的外侧并固定连接有旋转把手。
11.与相关技术相比较,本实用新型提供的一种胳膊屈伸锻炼器具有如下有益效果:
12.(1)本实用新型提供一种胳膊屈伸锻炼器,该装置结构简单,制造成本低,且体积小便于携带,有利于大力推广使用,便于患者为自己准备一个在家中,有利于促进患者的患肢康复。
13.(2)本实用新型提供一种胳膊屈伸锻炼器,通过来回转动双向丝杆,两侧的伸缩螺母因此沿着双向丝杆彼此靠近或远离,两个伸缩螺母分别推动或拉动两侧的支撑架,两个支撑架相应推动或拉动连接片,使连接片靠近或远离第二固定架,连接片通过传动曲杆推动或拉动连接件以及小臂轴上的臂轴支架摆动,小臂轴最终将力传输到小臂支架,从而轻松完成胳膊屈伸动作,使用起来十分方便。
附图说明
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的壳体内侧结构示意图;
16.图3为本实用新型的传动曲杆结构示意图。
17.图中标号:1、壳体;2、小臂支架;201、限位托架;202、小臂绑带架;3、海绵垫;4、大臂绑带架;5、旋转把手;6、大臂绑带;7、调位孔;8、小臂护托;9、小臂绑带;10、第一固定架;11、双向丝杆;12、伸缩螺母;13、支撑架;1301、限位齿轮;14、连接片;1401、传动曲杆;15、连接件;16、小臂轴;1601、臂轴支架;17、第二固定架。
具体实施方式
18.下面结合附图和实施方式对本实用新型作进一步说明。
19.请结合参阅附图1
‑
3,一种胳膊屈伸锻炼器,包括壳体1,壳体1的顶端中侧设置有大臂限位组件,壳体1的一侧转动连接有小臂支架2,小臂支架2的内侧设置有小臂限位组件,小臂支架2的两端均开设有多个调位孔7,壳体1的内顶侧设置有传动组件,使用时,将该器材放在桌面,患者通过大臂限位组件将大臂限位,并通过小臂限位组件将小臂限位,通过转动任意一侧的旋转把手5使壳体1内的传动组件驱动小臂支架2来回摆动,从而便于起到轻松进行胳膊的屈伸锻炼。
20.进一步的方案中,大臂限位组件包括海绵垫3、大臂绑带6,海绵垫3固定连接于壳体1的顶端中侧海绵垫3两侧均设置有多个大臂绑带架4,且大臂绑带架4固定连接于壳体1的顶端,大臂绑带6位于海绵垫3的顶侧,大臂绑带6的两侧分别嵌设于两个大臂绑带架4的内侧,
21.通过采用上述技术方案,患者将大臂置于海绵垫3上,患者可以根据个人的大臂长短,调整大臂绑带6在不同大臂绑带架4上的位置,最后通过大臂绑带6即可将大臂绑定限位。
22.进一步的方案中,小臂限位组件包括小臂护托8、限位托架201,小臂护托8设置于小臂支架2的内侧,小臂护托8的两端均缝合有小臂绑带9,两个小臂绑带9靠近小臂支架2的位置共同套设有小臂绑带架202,且小臂绑带架202与相邻的调位孔7之间转动连接,限位托架201固定连接于小臂支架2的底端远离壳体1的一侧,
23.通过采用上述技术方案,患者将小臂放在小臂护托8内,然后用小臂绑带9固定,小
臂支架2上设置有调位孔7,可以根据小臂长短将小臂绑带架202固定在合适的一组调位孔7之间。
24.进一步的方案中,传动组件包括第一固定架10、第二固定架17,第一固定架10固定连接于壳体1的内顶端远离小臂支架2的一侧,第一固定架10的内侧转动连接有双向丝杆11,双向丝杆11的两侧均螺纹连接有伸缩螺母12,两个伸缩螺母12均转动连接有支撑架13,两个支撑架13远离伸缩螺母12的一端均固定连接有限位齿轮1301,且两个限位齿轮1301之间啮合连接,两个限位齿轮1301的外侧共同转动连接有连接片14,连接片14远离双向丝杆11的一端中间位置固定连接有传动曲杆1401,第二固定架17固定连接于壳体1的内顶端靠近小臂支架2的一侧,第二固定架17的两端均转动连接有小臂轴16,且小臂轴16延伸至壳体1的外侧并与小臂支架2之间固定连接,两个小臂轴16远离小臂支架2的一端均固定连接有臂轴支架1601,两个臂轴支架1601共同固定连接有连接件15,且连接件15与传动曲杆1401之间转动连接,
25.通过采用上述技术方案,通过来回转动双向丝杆11,两侧的伸缩螺母12因此沿着双向丝杆11彼此靠近或远离,两个伸缩螺母12分别推动或拉动两侧的支撑架13,两个支撑架13相应推动或拉动连接片14,使连接片14靠近或远离第二固定架17,连接片14通过传动曲杆1401推动或拉动连接件15以及小臂轴16上的臂轴支架1601摆动,小臂轴16最终将力传输到小臂支架2,从而轻松完成胳膊屈伸动作。
26.进一步的方案中,双向丝杆11的两端均延伸至壳体1的外侧并固定连接有旋转把手5,
27.通过采用上述技术方案,便于通过旋转把手5来驱动双向丝杆11来回转动。
28.工作原理:患者将大臂置于海绵垫3上,患者通过大臂绑带6即可将大臂绑定限位,患者将小臂放在小臂护托8内,然后用小臂绑带9固定,通过来回转动旋转把手5,使双向丝杆11来回转动,两侧的伸缩螺母12因此沿着双向丝杆11彼此靠近或远离,两个伸缩螺母12分别推动或拉动两侧的支撑架13,两个支撑架13相应推动或拉动连接片14,使连接片14靠近或远离第二固定架17,连接片14通过传动曲杆1401推动或拉动连接件15以及小臂轴16上的臂轴支架1601摆动,小臂轴16最终将力传输到小臂支架2,从而轻松完成胳膊屈伸动作。
29.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。