1.本实用新型涉及立体视觉技术领域,尤其涉及一种基于立体视觉的生物器官形态测量模拟装置。
背景技术:
2.由于医生职业的特殊性,比如病症不可重复性、治疗手段不可随意用于任何人体或活体、手术不可能反复操作等特性,使得培养一名合格的医生需要花费数十年,甚至更久,从而影响这些工作的有效开展。对于病灶,也需要在手术之前预先了解其物理尺寸,对于病灶的物理尺寸,也不能进行直接接触式测量,需要采用非接触式的测量方式,这给新手医生人员代来了一定的挑战,稍有操作不当,就会导致病人的病情不能如期恢复,甚至引发新的病灶。现有技术中,没有对应的模拟测量训练装置。
技术实现要素:
3.本实用新型所要解决的技术问题是针对上述现有技术的不足,提供一种基于立体视觉的生物器官形态测量模拟装置。
4.本实用新型解决上述技术问题的技术方案如下:一种基于立体视觉的生物器官形态测量模拟装置,包括工作台、底座、云台、立体视觉测量设备、仿真人体组织和模拟手术杆,所述底座设置在所述工作台的一侧,所述云台滑动设置在所述底座上,并可在所述底座上朝着靠近或远离所述工作台的方向滑动,所述立体视觉测量设备设置在所述云台上,并可随着所述云台在所述底座上滑动,以靠近或远离所述工作台,所述仿真人体组织设置在所述工作台上,且所述仿真人体组织位于所述立体视觉测量设备的视域范围内,所述模拟手术杆上间隔设置有多个标记点,手持所述模拟手术杆并使其末端与所述仿真人体组织上的模拟微创孔接触,使得所述立体视觉测量设备测量所述标记点的坐标,以得到所述仿真人体组织上的关键点之间的间距。
5.本实用新型的有益效果是:本实用新型的基于立体视觉的生物器官形态测量模拟装置,通过将立体视觉设备设置在所述云台上,这样可以根据不同的仿真人体组织调节立体视觉设备的位置,并配合所述模拟手术杆,即可根据测量得到的标记点的坐标计算出与模拟手术杆的末端接触的仿真人体组织上关键点的坐标及间距,得到病灶尺寸,方便后续进行重构病灶,同时模拟手术杆模拟手术杆可以模拟手术训练操作,便于医生快速掌握相关技能,整个装置结构简单,操作方便,测量精度高。
6.在上述技术方案的基础上,本实用新型还可以做如下改进:
7.进一步:所述底座的一端与所述工作台的一侧连接,所述底座的上表面沿着其两端之间连线方向设有滑槽,所述云台的底部设有与所述滑槽相匹配的滑轨,所述云台与所述底座通过所述滑轨与所述滑槽配合滑动连接。
8.上述进一步方案的有益效果是:通过将所述底座的一端与所述工作台的一侧连接,使得整个装置成为一个整体,保证在测量时所述底座上的立体视觉测量设备与所述工
作台上的仿真人体组织之间保持相对位置不变,进而保证测量结果的精确性。
9.进一步:所述底座的一端端面设有固定销,所述工作台的一侧设有与所述固定销相匹配的固定孔,所述底座通过所述固定销插入所述固定孔内与所述工作台的一侧连接。
10.上述进一步方案的有益效果是:通过设置所述固定销与所述固定孔,可以使得所述底座与所述工作台稳定连接,并形成整体,使得在测量时所述底座上的立体视觉测量设备与所述工作台上的仿真人体组织之间保持相对位置不变。
11.进一步:所述云台包括支柱和固定台,所述滑轨设置在所述支柱的底部,所述固定台设置在所述支柱的上端,所述立体视觉测量设备设置在所述固定台上,且所述立体视觉测量设备可测量末端与所述仿真人体组织接触的所述模拟手术杆上的标记点的空间坐标。
12.上述进一步方案的有益效果是:通过设置所述滑轨可以方便所述支柱连同其上端的固定台上的立体视觉测量设备一同在所述底座上滑动,从而比较方便地调节所述底座上的立体视觉测量设备与所述工作台上的仿真人体组织之间的距离,使得仿真人体组织位于所述立体视觉测量设备的视域范围内,成像大小合适。
13.进一步:所述云台还包括前挡,所述前挡设置在所述固定台靠近所述工作台一侧的前部,且所述立体视觉测量设备的前部与所述前挡贴合设置。
14.上述进一步方案的有益效果是:通过设置所述前挡,可以方便精确安装所述立体视觉安装设备,使其光心连线与固定台的表面平行,并且其光心连线与光轴垂直,这样使得更容易计算出仿真人体组织上的关键点的坐标。
15.进一步:所述固定台与所述前挡一体成型设置。
16.上述进一步方案的有益效果是:通过将所述固定台与所述前挡一体成型设置,可以使得所述立体视觉测量设备与所述固定台的连接更加温度,保证在测量过程中所述立体视觉测量设备与所述仿真人体组织之间的相对位置保持不变。
17.进一步:所述立体视觉测量设备包括右网络视觉传感器和左网络视觉传感器,所述右网络视觉传感器和左网络视觉传感器分别设置在所述固定台上并与所述前挡贴合设置,且所述仿真人体组织分别位于所述右网络视觉传感器和左网络视觉传感器的视域范围内。
18.上述进一步方案的有益效果是:通过将所述右网络视觉传感器和左网络视觉传感器的前部分别与所述前挡贴合设置,这样可以使得所述右网络视觉传感器和左网络视觉传感器的前表面是共面设置,简化计算过程,使得测量结果更加精确。
附图说明
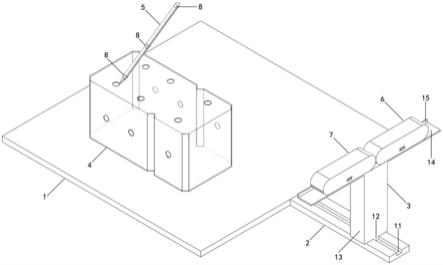
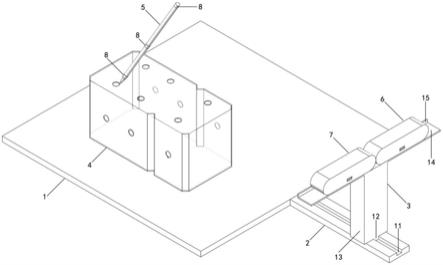
19.图1为本实用新型一实施例的基于立体视觉的生物器官形态测量模拟装置的结构示意图;
20.图2为本实用新型一实施例的仿真人体组织的结构示意图;
21.图3为本实用新型一实施例的模拟手术杆的结构示意图。
22.图4为本实用新型一实施例的工作台的结构示意图;
23.图5为本实用新型一实施例的底座的结构示意图;
24.图6为本实用新型一实施例的云台的结构示意图。
25.附图中,各标号所代表的部件列表如下:
26.1、工作台,2、底座,3、云台,4、仿真人体组织,5、模拟手术杆,6、右网络视觉传感器,7、左网络视觉传感器,8、标记点,9、固定孔,10、固定销,11、滑槽,12、滑轨,13、支柱,14、固定台,15、前挡。
具体实施方式
27.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
28.如图1所示,一种基于立体视觉的生物器官形态测量模拟装置,包括工作台1、底座2、云台3、立体视觉测量设备、仿真人体组织4和模拟手术杆5,所述底座2设置在所述工作台1的一侧,所述云台3滑动设置在所述底座2上,并可在所述底座2上朝着靠近或远离所述工作台1的方向滑动,所述立体视觉测量设备设置在所述云台3上,并可随着所述云台3在所述底座2上滑动,以靠近或远离所述工作台1,所述仿真人体组织4设置在所述工作台1上,且所述仿真人体组织4位于所述立体视觉测量设备的视域范围内,所述模拟手术杆5上间隔设置有多个标记点8,手持所述模拟手术杆5并使其末端与所述仿真人体组织4上的模拟微创孔接触,使得所述立体视觉测量设备测量所述标记点8的坐标,以得到所述仿真人体组织4上的关键点之间的间距。
29.本实用新型的基于立体视觉的生物器官形态测量模拟装置,通过将立体视觉设备设置在所述云台3上,这样可以根据不同的仿真人体组织4调节立体视觉设备的位置,并配合所述模拟手术杆5,即可根据测量得到的标记点8的坐标计算出与模拟手术杆5的末端接触的仿真人体组织4上关键点的坐标及间距,得到病灶尺寸,方便后续进行重构病灶,同时模拟手术杆5模拟手术杆5可以模拟手术训练操作,便于医生快速掌握相关技能,整个装置结构简单,操作方便,测量精度高。
30.本实用新型的实施例中,设计一个约10cm*10cm*20cm大小的长方体形腔体,用于模拟人的身体组织。如图2所示,在长方体的上表面有6个圆孔,直径约1cm,模拟在做微创手术时在人体胸部或腹部切开的微创孔,主要用于将模拟手术杆5插入到其腔体内并进行相关的手术操作。同样,在长方体的两侧面各有3个圆孔,用于模拟从人体的侧胸或腰部进行微创手术。
31.如图3所示,实际中,在所述模拟手术杆5上设置多个标记点8(本实用新型中标记点8的数量为三个),将所述模拟手术杆5的末端触压仿真人体组织4上的关键点,由于已知模拟手术杆5的顶点与标记点8间的物理距离,从而可以根据测量获得的标记点坐标来推算出触点的坐标,进而计算出欲测量的关键点之间的距离。
32.借助虚拟现实应用软件,实习医生便可以在电脑屏幕上看到同样形态的“人体”(在“人体”内部,可以有各种虚拟组织,如心脏、肝脏、脾肾等),然后根据某种病情的治疗方案,可以手握手术器械在该模拟“人体”上进行组织测量和病灶“灼烧”等训练。由于模拟人体和虚拟组织的结合,使得实习医生可以根据某项手术的治疗方案(即治疗步骤和方法已确定)多次重复地进行手术训练,这将大大提高医生的手术效果,从而为进行真实的人体手术打下坚实有效的基础。
33.如图5和图6所示,在本实用新型的一个或多个实施例中,所述底座2的一端与所述工作台1的一侧连接,所述底座2的上表面沿着其两端之间连线方向设有滑槽11,所述云台3
的底部设有与所述滑槽11相匹配的滑轨12,所述云台3与所述底座2通过所述滑轨12与所述滑槽11配合滑动连接。通过将所述底座2的一端与所述工作台1的一侧连接,使得整个装置成为一个整体,保证在测量时所述底座2上的立体视觉测量设备与所述工作台1上的仿真人体组织4之间保持相对位置不变,进而保证测量结果的精确性。
34.如图4和图5所示,在本实用新型的一个或多个实施例中,所述底座2的一端端面设有固定销10,所述工作台1的一侧设有与所述固定销10相匹配的固定孔9,所述底座2通过所述固定销10插入所述固定孔9内与所述工作台1的一侧连接。通过设置所述固定销10与所述固定孔9,可以使得所述底座2与所述工作台1稳定连接,并形成整体,使得在测量时所述底座2上的立体视觉测量设备与所述工作台1上的仿真人体组织4之间保持相对位置不变。
35.如图6所示,在本实用新型的一个或多个实施例中,所述云台3包括支柱13和固定台14,所述滑轨12设置在所述支柱13的底部,所述固定台14设置在所述支柱13的上端,所述立体视觉测量设备设置在所述固定台14上,且所述立体视觉测量设备可测量末端与所述仿真人体组织4接触的所述模拟手术杆5上的标记点8的空间坐标。通过设置所述滑轨12可以方便所述支柱13连同其上端的固定台14上的立体视觉测量设备一同在所述底座2上滑动,从而比较方便地调节所述底座2上的立体视觉测量设备与所述工作台1上的仿真人体组织4之间的距离,使得仿真人体组织4位于所述立体视觉测量设备的视域范围内,成像大小合适。
36.可选地,在本实用新型的一个或多个实施例中,所述云台3还包括前挡15,所述前挡15设置在所述固定台14靠近所述工作台1一侧的前部,且所述立体视觉测量设备的前部与所述前挡15贴合设置。通过设置所述前挡15,可以方便精确安装所述立体视觉安装设备,使其光心连线与固定台14的表面平行,并且其光心连线与光轴垂直,这样使得更容易计算出仿真人体组织4上的关键点的坐标。
37.可选地,在本实用新型的一个或多个实施例中,所述固定台14与所述前挡15一体成型设置。通过将所述固定台14与所述前挡15一体成型设置,可以使得所述立体视觉测量设备与所述固定台14的连接更加温度,保证在测量过程中所述立体视觉测量设备与所述仿真人体组织4之间的相对位置保持不变。
38.在本实用新型的一个或多个实施例中,所述立体视觉测量设备包括右网络视觉传感器6和左网络视觉传感器7,所述右网络视觉传感器6和左网络视觉传感器7分别设置在所述固定台14上并与所述前挡15贴合设置,且所述仿真人体组织4分别位于所述右网络视觉传感器6和左网络视觉传感器7的视域范围内。通过将所述右网络视觉传感器6和左网络视觉传感器7的前部分别与所述前挡15贴合设置,这样可以使得所述右网络视觉传感器6和左网络视觉传感器7的前表面是共面设置,简化计算过程,使得测量结果更加精确。
39.实际中,首先,将底座2左端的两个固定销10插入工作平台1右侧的两个固定孔9中,对其进行固定,并保证底座2上的滑道11朝上。固定后,这两个部件的上下表面都在同一平面上(即它们的厚度一样)。其次,将云台3的滑轨12卡入底座2上的滑道11中。滑轨12的尺寸和滑道11的尺寸是吻合的,确定好测量位置后,滑道可以正常地稳住云台。在有需要的情况下,可以沿着滑道前后移动云台,调整立体视觉测量装置的视域,以便于适应不同大小的测量对象。云台3上端的固定台14是用于放置底部平整的右网络视觉传感器6和左网络视觉传感器7,确保右网络视觉传感器6和左网络视觉传感器7的光心连线与工作平台的上表面
是平行的。同时,固定台14前面的挡板15是用于确保光心的连线与光轴是垂直的关系。将右网络视觉传感器6和左网络视觉传感器7分别放置在固定台1414上,并使得右网络视觉传感器6和左网络视觉传感器7的前表面与前挡15是贴合的。此时,右网络视觉传感器6和左网络视觉传感器7的固定螺孔与固定台14上的固定孔是对齐的,使用相机专用螺钉对其进行固定。
40.将仿真人体组织4放置在操作台面8上,使得有6个微创孔1的面朝上。同时,要确保仿真人体组织4是处于测量装置视域范围内的。训练人员手持模拟手术杆5的上端,将模拟手术杆的末端与仿真人体组织4的各个特征点(关键点)接触,用于模拟测量仿真人体组织4上的关键点间距或统计仿真人体组织4的表面多处空间点坐标后进行重建工作。注意,在操作的任何时候,要确保模拟手术杆5上的三个标记点8处于立体视觉测量设备的视域内。
41.由于该训练装置要结合虚拟现实或增强现实技术,所以,在本仿真人体组织4的旁边会放置一台模型处理设备。在显示器中,训练人员可以看到与真实的仿真人体组织4一样的虚拟人体,以及虚拟手术杆(操作时,虚拟手术杆会和真实的模拟手术杆5同步运动)。不同的是,在虚拟人体内部,还会有虚拟组织,它们是训练操作时的主要对象。训练人员手持模拟手术杆5,眼睛注视着显示器中的场景,将其顶端穿过虚拟人体上任一微创孔。此时,真实的模拟手术杆5的末端会同样地穿过与虚拟人体对应的真实模拟仿真人体组织4上相应的微创孔。通过观察虚拟场景中的虚拟组织,然后手握模拟操作杆5对其不断地执行某项操作,直到实现训练的目的。
42.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。