1.本发明涉及一种挖掘设备,具体为基于土壤修复的污泥挖掘设备及其使用方法,属于土壤修复挖掘技术领域。
背景技术:
2.土壤修复是使遭受污染的土壤恢复正常功能的技术措施,再进行一些土壤修复的过程中需要进行污泥的挖掘处理,因此需要使用一些挖掘设备进行挖掘处理。
3.在对于一些待修复的农田进行污泥挖掘处理时,现有的一些挖掘设备都是比较大且笨重,再进行一些地形比较复杂或者地方比较小的田地进行操作时,那些大型的挖掘设备不便于操作,大型的挖掘设备无法开进去就不能进行挖掘处理,同时那一类的大型挖掘设备造价过高,且使用成本较高。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供基于土壤修复的污泥挖掘设备及其使用方法。
5.本发明通过以下技术方案来实现上述目的,基于土壤修复的污泥挖掘设备,包括:
6.配重底座,所述配重底座的顶端开设有移动口,所述移动口的两侧开设有两个移动滑槽,所述配重底座底端的四角均设置有移动轮;
7.承载底板,所述承载底板设置在配重底座的顶端,所述承载底板的顶端开设有穿插口,所述承载底板的顶端设置有挖掘组件;
8.移动组件,所述移动组件设置在承载底板的底端,所述移动组件包括正反转电机和转动杆,所述正反转电机的输出端和转动杆的杆臂之间套设有传动皮带,所述转动杆的两端均设置有转动齿轮,两个所述转动齿轮分别设置在两个移动滑槽之间;
9.定位组件,两个所述定位组件分别设置在配重底座的两侧,且位于靠近正反转电机的一端,所述定位组件包括控制盒,所述控制盒的顶端转动穿插连接有挤压螺杆,所述控制盒内设置有控制块,所述控制块的底端固定连接有定位杆。
10.优选的,两个所述移动滑槽的底端均开设有导向滑槽,两个所述导向滑槽底端的内壁均设置有多个助力齿条,两个所述转动齿轮转动穿插连接在两个导向滑槽内,且与助力齿条啮合,所述配重底座的顶端,且位于移动口的两侧开设有两个连接滑槽,所述配重底座顶端的背面固定连接有挂载板,所述挂载板的顶端开设有挂载孔。
11.优选的,所述承载底板底端的两侧均固定连接有两个连接滑块,两个所述连接滑块,两个所述连接滑块分别和两个连接滑槽滑动穿插连接。
12.优选的,所述承载底板的底端,且位于两个连接滑块之间固定连接有两个支撑板,两个所述支撑板底部的一侧均开设有支撑孔,所述转动杆转动穿插连接在两个支撑孔之间,所述转动杆的杆臂开设有联动槽,所述传动皮带的其中一端贯穿穿插口,且套设在联动槽内。
13.优选的,所述承载底板的顶端,且位于穿插口的一侧固定连接有承载台,所述承载台的顶端开设有固定槽,所述固定槽和正反转电机固定连接。
14.优选的,所述挖掘组件包括控制台,所述控制台的正面设置有控制杆,所述控制杆的底端,且位于远离控制台的一端设置有伸缩杆,所述伸缩杆的底端固定连接有铲斗。
15.优选的,所述控制盒的正面开设有控制口,所述控制盒顶端和底端的中部均开设有控制螺孔,两个所述控制螺孔均和控制口相互贯通,所述挤压螺杆和两个控制螺孔螺纹穿插连接,所述挤压螺杆的顶端固定连接有转动盘。
16.优选的,所述控制口正面和背面的两端,且位于两侧的内壁均开设有两个控制滑槽,四个所述控制滑槽内均设置有支撑弹簧,且四个所述支撑弹簧的底端分别和四个控制滑槽底端的内壁固定连接。
17.优选的,所述控制块的正面和背面均固定连接有支撑滑杆,两个所述支撑滑杆和控制口滑动穿插连接,两个所述支撑滑杆的两侧,且均位于远离控制块的一端固定连接有两个支撑滑块,四个所述支撑滑块分别和四个控制滑槽滑动穿插连接,且四个所述支撑滑块的底端分别和四个支撑弹簧的顶端固定连接。
18.基于土壤修复的污泥挖掘设备的使用方法,所述挖掘操作包括以下几个步骤;
19.第一步:通过移动轮将整个装置移动至待挖掘的地方,然后踩住移动轮的刹车盘进行停驻;
20.第二步:通过转动转动盘使得挤压螺杆向下挤压控制块和定位杆,利用定位杆向下穿插进地面进行整个装置的定位;
21.第三步:启动控制台操作铲斗进行污泥挖掘操作;
22.第四步:进行换位挖掘,启动正反转电机,正反转电机通过传动皮带带动转动杆进行转动,转动杆带动两个转动齿轮进行转动,转动齿轮转动配合着助力齿条的啮合作用,能够在导向滑槽内进行移动,通过转动齿轮的移动使得承载底板在配重底座的顶端进行移动;
23.第五步:进行更换位置,先反向进行第二步操作,解除装置的锁定,然后再进行装置的重新定位即可。
24.本发明的有益效果是:1、本发明,采用配重底座和承载底板的连接形式构成整个挖掘装置的主体,通过在配重底座的底端设置移动轮,使得整个装置能够进行移动,同时在承载底板的顶端设置上挖掘组件,这样就能够使整个装置完成一个挖掘机的挖掘功能,整个装置更加小巧,能够使用很多比较复杂或狭小的地形。
25.2、本发明设置有定位组件,通过定位组件的设置,当装置移动至待挖掘的位置处时,通过定位组件能够对整个装置记性定位操作,这样就能够使得装置在使用时更加稳定,同时政哥哥定位装置的操作十分的简单灵活,这样也就使得整个装置的定位更加的方便。
26.3、本发明在承载底板的顶端设置有移动组件,通过配重底座和承载底板结构的设计,使得移动组件能够带动承载底板在配重底座的顶端进行水平方向的移动,这样就增加了整个装置的挖掘范围,因此便能够省去不断定位的麻烦,使得整个装置的使用更加的灵活多变,使装置使用起来效果更佳的明显,同时在配重底座上社会自由挂载板,也能够通过挂载板利用载具对整个装置进行牵引,这样就使得装置的移动控制更加的多样。
附图说明
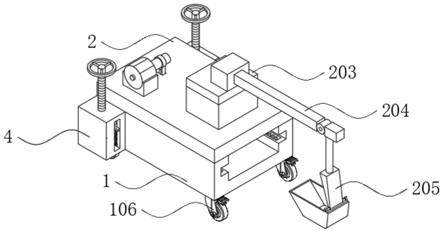
27.图1为本发明整体结构示意图;
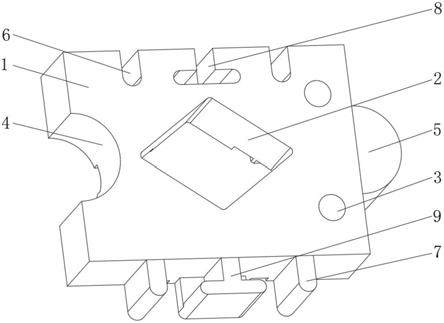
28.图2为本发明配重底座的结构示意图;
29.图3为本发明图2中a处的结构放大示意图;
30.图4为本发明承载底板的俯视图;
31.图5为本发明承载底板的仰视图;
32.图6为本发明移动组件的结构示意图;
33.图7为本发明定位组件的结构示意图;
34.图8为本发明定位组件的剖视图;
35.图9为本发明图8中b处的结构放大示意图。
36.图中:1、配重底座;101、连接滑槽;102、移动滑槽;103、导向滑槽;104、助力齿条;105、挂载板;106、移动轮;2、承载底板;201、连接滑块;202、承载台;203、控制台;204、控制杆;205、铲斗;3、正反转电机;301、传动皮带;302、转动杆;303、转动齿轮;304、支撑板;4、控制盒;401、控制口;402、控制螺孔;403、控制滑槽;404、支撑弹簧;5、控制块;501、定位杆;502、支撑滑杆;503、支撑滑块;6、转动盘;601、挤压螺杆。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.请参阅图1
‑
9所示,基于土壤修复的污泥挖掘设备及其使用方法,包括:
39.配重底座1,配重底座1的顶端开设有移动口,移动口的两侧开设有两个移动滑槽102,配重底座1底端的四角均设置有移动轮106;
40.配重底座1采用纯金属制造,中重量占比为整个设备的三分之二,移动口处于配重底座1正面的一侧设置为开放式,四个移动轮106均为万向轮,能够自由转向和移动,且移动轮106均有刹车组件,能够有效地刹车停驻。
41.承载底板2,承载底板2设置在配重底座1的顶端,承载底板2的顶端开设有穿插口,承载底板2的顶端设置有挖掘组件;
42.承载底板2的长度和宽度与配重底座1的长度和宽度对应相同,穿插口开设在承载底板2顶端靠近背面的一边侧,挖掘组件设置在承载底板2顶端中部的位置。
43.挖掘组件包括控制台203,控制台203的正面设置有控制杆204,控制杆204的底端,且位于远离控制台203的一端设置有伸缩杆,伸缩杆的底端固定连接有铲斗205;
44.控制台203为现有的挖掘机操控台,配备有成熟的操控系统,能够完成对控制杆204的正常挖掘操控,控制杆204的杆臂设置有转动连接,能够在控制台203的操控下进行竖直方向的转动调节。
45.承载底板2底端的两侧均固定连接有两个连接滑块201,两个连接滑块201,两个连接滑块201分别和两个连接滑槽101滑动穿插连接;
46.连接滑块201的宽度和高度与连接滑槽101的开设宽度和深度对应相同,连接滑块
201配合连接滑槽101实现限定承载底板2在配重底座1顶端的滑动距离。
47.移动组件,移动组件设置在承载底板2的底端,移动组件包括正反转电机3和转动杆302,正反转电机3的输出端和转动杆302的杆臂之间套设有传动皮带301,转动杆302的两端均设置有转动齿轮303,两个转动齿轮303分别设置在两个移动滑槽102之间;
48.正反转电机3有一个延伸出来的输出端,传动皮带301的其中一端套设在输出端延伸处的杆臂上,两个转动齿轮303固定连接在转动杆302的两端。
49.定位组件,两个定位组件分别设置在配重底座1的两侧,且位于靠近正反转电机3的一端,定位组件包括控制盒4,控制盒4的顶端转动穿插连接有挤压螺杆601,控制盒4内设置有控制块5,控制块5的底端固定连接有定位杆501;
50.控制盒4的高度和配重底座1的高度相同,控制块5只能够在控制盒4内部进行移动,定位杆501的底端设置为锥形,这样能够更加省力的刺穿进地面,定位杆501的顶端和控制块5底端的中部固定连接。
51.作为本发明的一种技术优化方案,两个移动滑槽102的底端均开设有导向滑槽103,两个导向滑槽103底端的内壁均设置有多个助力齿条104,两个转动齿轮303转动穿插连接在两个导向滑槽103内,且与助力齿条104啮合,配重底座1的顶端,且位于移动口的两侧开设有两个连接滑槽101,配重底座1顶端的背面固定连接有挂载板105,挂载板105的顶端开设有挂载孔;
52.两个移动滑槽102水平中心对称开设在移动口两侧内壁的顶部,两个导向滑槽103分别开设在两个移动滑槽102底端的中部,移动滑槽102内壁的高度时转动齿轮303直径的一点五倍;
53.转动齿轮303能够在导向滑槽103内自由滚动,转动齿轮303的宽度和导向滑槽103的开设宽度相同,挂载板105的正面和配重底座1顶端背面的中部固定连接。
54.作为本发明的一种技术优化方案,承载底板2的底端,且位于两个连接滑块201之间固定连接有两个支撑板304,两个支撑板304底部的一侧均开设有支撑孔,转动杆302转动穿插连接在两个支撑孔之间,转动杆302的杆臂开设有联动槽,传动皮带301的其中一端贯穿穿插口,且套设在联动槽内;
55.支撑板304的高度是连接滑块201高度的两倍,两个承载底板2水平中心对称设置,转动杆302的两端分别贯穿两个支撑孔相背的一侧,且贯穿的两端分别和两个转动齿轮303固定连接,传动皮带301始终处于紧绷状态,这样能够有效的进行传动。
56.承载底板2的顶端,且位于穿插口的一侧固定连接有承载台202,承载台202的顶端开设有固定槽,固定槽和正反转电机3固定连接;
57.承载台202和正反转电机3的外壁固定连接,这样才能够使正反转电机3在启动时不会随意的晃动,保证传动的最佳效果。
58.作为本发明的一种技术优化方案,控制盒4的正面开设有控制口401,控制盒4顶端和底端的中部均开设有控制螺孔402,两个控制螺孔402均和控制口401相互贯通,挤压螺杆601和两个控制螺孔402螺纹穿插连接,挤压螺杆601的顶端固定连接有转动盘6;
59.两个控制螺孔402竖直方向中心对称,且开设直径和深度均相同,控制螺孔402的直径和挤压螺杆601的外壁直径相同,且挤压螺杆601外壁的螺纹和控制螺孔402的内螺纹相匹配。
60.控制口401正面和背面的两端,且位于两侧的内壁均开设有两个控制滑槽403,四个控制滑槽403内均设置有支撑弹簧404,且四个支撑弹簧404的底端分别和四个控制滑槽403底端的内壁固定连接;
61.同一侧的两个控制滑槽403水平中心对称,且四个控制滑槽403槽壁高度相同,且相互对称。
62.作为本发明的一种技术优化方案,控制块5的正面和背面均固定连接有支撑滑杆502,两个支撑滑杆502和控制口401滑动穿插连接,两个支撑滑杆502的两侧,且均位于远离控制块5的一端固定连接有两个支撑滑块503,四个支撑滑块503分别和四个控制滑槽403滑动穿插连接,且四个支撑滑块503的底端分别和四个支撑弹簧404的顶端固定连接;
63.支撑滑杆502的宽度和控制口401的宽度相同,两个支撑滑杆502相背一侧之间的距离和控制盒4的宽度相同,支撑滑块503的长度和宽度与控制滑槽403的开设深度和宽度对应相同。
64.基于土壤修复的污泥挖掘设备的使用方法,挖掘操作包括以下几个步骤;
65.第一步:通过移动轮106将整个装置移动至待挖掘的地方,然后踩住移动轮106的刹车盘进行停驻;
66.第二步:通过转动转动盘6使得挤压螺杆601向下挤压控制块5和定位杆501,利用定位杆501向下穿插进地面进行整个装置的定位;
67.第三步:启动控制台203操作铲斗205进行污泥挖掘操作;
68.第四步:进行换位挖掘,启动正反转电机3,正反转电机3通过传动皮带301带动转动杆302进行转动,转动杆302带动两个转动齿轮303进行转动,转动齿轮303转动配合着助力齿条104的啮合作用,能够在导向滑槽103内进行移动,通过转动齿轮303的移动使得承载底板2在配重底座1的顶端进行移动;
69.第五步:进行更换位置,先反向进行第二步操作,解除装置的锁定,然后再进行装置的重新定位即可。
70.本发明在使用时,参考图1至图9;
71.实施第一步操作,通过移动轮106将整个装置移动至待挖掘的地方,然后踩住移动轮106的刹车盘进行停驻。
72.实施第二步操作,利用定位组件将整个装置固定住,参考图7至图9;
73.握住转动盘6,进行顺时针转动,转动盘6带动挤压螺杆601顺时针转动的同时并沿着控制螺孔402向下移动,挤压螺杆601向下移动的时候会向下挤压控制块5,控制块5向下移动带动两个支撑滑杆502下移,两个支撑滑杆502下移带动四个支撑滑块503下移的同时向下挤压四个支撑弹簧404;
74.控制块5下移带动定位杆501下移并穿过下方的控制螺孔402,定位杆501移动穿插进地面,持续转动转动盘6直到定位杆501穿插进地面后将整个装置完全定住。
75.实施第三步操作,启动控制台203操作铲斗205进行污泥挖掘操作。
76.实施第四步操作,进行换位挖掘,启动正反转电机3,正反转电机3通过传动皮带301带动转动杆302进行转动,转动杆302带动两个转动齿轮303进行转动,转动齿轮303转动配合着助力齿条104的啮合作用,能够在导向滑槽103内进行移动,通过转动齿轮303的移动使得承载底板2在配重底座1的顶端进行移动。
77.实施第五步操作,进行更换位置,先反向进行第二步操作,解除装置的锁定,然后再进行装置的重新定位即可。
78.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。