1.本实用新型属于机器人设备技术领域,尤其涉及种一种服务型高铁送餐机器人。
背景技术:
2.在高铁乘务工作与后疫情时代的背景下,人与人之间的接触需要保持在一定的距离。在高铁列车上,表现得尤为突出,乘务员的工作环境也变得尤为严峻。随着机器人技术成熟,机器人技术应用于社会中的各个方面。针对目前高铁送餐系统的不足,如何利用机器人代替乘务人员进行送餐,在不影响乘客搭乘体验的前提下,减少乘务员与乘客的接触成为人们研究的焦点。
3.机器人的种类繁多,但是对于动车组列车环境来说,身体庞大的机器人不适于在狭小的环境下移动,设计一款能够适用于机车环境的机器人进行送餐是当下需要解决的问题。
技术实现要素:
4.针对现有技术不足,本实用新型的目的在于提供一种服务型高铁送餐机器人,能够适应机车中狭小环境的需要,完成送餐工作,减少了乘务人员与乘客接触的机会。
5.本实用新型提供如下技术方案:
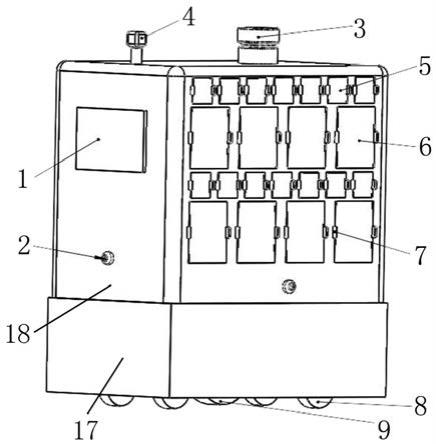
6.一种服务型高铁送餐机器人,包括底座,所述底座的底部设置有滚轮,所述底座的底部设置有摩擦轮机构,所述底座的上侧设置有箱体,所述箱体上设置有储物柜,所述储物柜包括第一储物柜和第二储物柜,所述储物柜开处上均设置有旋转门,所述旋转门通过转轴与箱体连接,所述旋转门远离转轴的一侧设置有电磁锁扣,所述箱体上设置有显示器。
7.优选的,所述箱体上设置有红外线传感器、摄像头和激光雷达,所述红外线传感器、摄像头和激光雷达均与单片机连接。
8.优选的,所述显示器设置有触摸屏,所述显示器与单片机连接。
9.优选的,所述滚轮为麦克纳姆轮,所述麦克纳姆轮数量为四个,所述麦克纳姆轮呈矩形阵列设置。
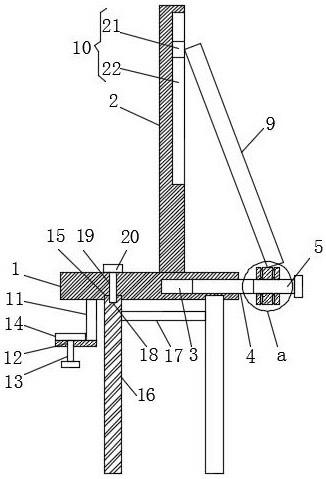
10.优选的,所述摩擦轮机构包括连杆,所述连杆的一端与底座的内壁连接,另一端与摩擦轮连接;所述底座的内壁设置有固定杆,所述固定杆与连杆之间连接有弹簧;所述弹簧的一端与固定杆连接,另一端与连杆连接;所述底座的内壁还设置有电机,所述电机的输出轴设置有线槽,所述线槽内缠绕有拉线,所述拉线的一端与连杆连接。
11.优选的,所述连杆上设置有转轴,所述转轴上设置有旋转阻尼器,所述摩擦轮与旋转阻尼器连接。
12.优选的,所述第一储物柜与第二储物柜在竖直方向上依次交替设置。
13.优选的,所述储物柜内设置有高密度微孔发泡缓冲垫托盘,使配送物品更稳定。
14.优选的,所述单片机采用stm单片机,高性能、低成本、低功耗。
15.优选的,所述箱体内设置有语音模块,所述语音模块与单片机连接。
16.与现有技术相比,本实用新型具有以下有益效果:
17.(1)本实用新型一种服务型高铁送餐机器人,通过设置储物柜,储物柜内采用的高密度微孔发泡缓冲垫托盘,使配送物品更稳定,尽可能多的运送的乘客所需要的物品,为更多的乘客提供服务。
18.(2)本实用新型一种服务型高铁送餐机器人,通过设置 麦克纳姆轮,使装置移动更加灵活,适应了机车狭小空间环境的需要。
19.(3)本实用新型一种服务型高铁送餐机器人,通过设置红外线传感器、摄像头和激光雷达,使得机器人能够实现完全的智慧行走,对于各种复杂的环境依旧可以实现准确判断,精确避障。
20.(4)本实用新型一种服务型高铁送餐机器人,通过采用stm32单片机,具有高性能、低成本、低功耗的特点,提高了装置的使用效率。
附图说明
21.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
22.图1是本实用新型的整体结构示意图。
23.图2是本实用新型的滚轮示意图。
24.图3是本实用新型滚轮分布示意图。
25.图4是本实用新型摩擦轮机构示意图。
26.图中:1、显示器;2、红外线传感器;3、激光雷达;4、摄像头;5、第一储物柜;6、第二储物柜;7、电磁锁扣;8、滚轮;9、摩擦轮机构;10、固定杆;11、弹簧;12、连杆;13、电机;14、线槽;15、拉线;16、摩擦轮;17、底座;18、箱体。
具体实施方式
27.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述。显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
28.因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
29.实施例一
30.如图1
‑
4所示,一种服务型高铁送餐机器人,包括底座17,所述底座17的底部设置有滚轮8,所述底座17的底部设置有摩擦轮机构9,所述摩擦轮机构9用于制动本装置,所述底座17的上侧设置有箱体18,所述箱体18上设置有储物柜,所述储物柜包括第一储物柜5和
第二储物柜6,所述储物柜用于盛放物品,所述储物柜开口处设置有旋转门,所述箱体18上设置有显示器1。所述旋转门通过转轴与箱体18连接,所述旋转门远离转轴的一侧设置有电磁锁扣7。
31.所述箱体18上设置有红外线传感器2、摄像头4和激光雷达3,所述红外线传感器2、摄像头4和激光雷达3均与单片机连接,所述红外线传感器2、摄像头4和激光雷达3将数据传输至单片机,单片机进行接收和处理数据,由单片机进而控制四组麦克纳姆轮驱动电路做出相应的动作,进行常规避让障碍物,规划最短前进路线。激光雷达3可以实时获得所在环境的高精度轮廓信息,单片机控制模块,可以联网通过上位机控制,也可以做到离线自主操作,便于应对工作环境中的极端状况。触摸屏交互设计功能设计主要是,触摸屏发送数据和指令给单片机,单片机接收数据并进行分析判断,下传给上位机,上位机模拟电机运转,并反馈给单片机,单片机接收数据并分析判断发送给触摸屏显示。
32.所述箱体18内设置有语音模块,所述语音模块与单片机连接。所述显示器1设置有触摸屏,所述显示器1与单片机连接。语音模块接收到外界语音信息后单片机根据准备好的应答进行回馈。可触摸屏与单片机实时通信传输数据,根据用户的需求执行相应任务。在语音交互的功能实现中,ld3320 采用的语音识别技术是基于“关键词语列表”的,用户事先设定所要识别的关键词及其对应的识别结果编号(识别码),将关键词和识别码依次以拼音字符的形式写进芯片特定的数据区寄存器,以这种方式避免了用户录音训练,设置好芯片工作模式为语音识别则可立即进行语音识别。
33.所述滚轮为麦克纳姆轮,所述麦克纳姆轮数量为四个,所述麦克纳姆轮呈矩形阵列设置。
34.所述摩擦轮机构9包括连杆12,所述连杆12的一端与底座17的内壁连接,另一端与摩擦轮16连接;所述底座17的内壁设置有固定杆10,所述固定杆10与连杆12之间连接有弹簧11;所述弹簧11的一端与固定杆10连接,另一端与连杆12连接;所述底座17的内壁还设置有电机13,所述电机13的输出轴设置有线槽14,所述线槽14内缠绕有拉线15,所述拉线15的一端与连杆12连接,所述电机13与单片机连接,当需要制动时,电机转动,连杆12旋转一定的角度,摩擦轮16与地面接触,增加了装置与地面之间的摩擦力,起到了制动的目的。
35.所述连杆12上设置有转轴,所述转轴上设置有旋转阻尼器,所述摩擦轮与旋转阻尼器连接。
36.所述第一储物柜5与第二储物柜6在竖直方向上依次交替设置。所述储物柜内设置有高密度微孔发泡缓冲垫托盘,使配送物品更稳定。所述单片机采用stm32单片机,高性能、低成本、低功耗。
37.实施例二
38.结合实施例一,单片机程序设计上使用stm32系列的单片机,这种单片机使用arm最新的先进架框cortex
‑
m3内核具有优良的实时性能和杰出的功耗控制使用c语言进行程序设计实验各种功能,c语言本身带有各种函数库,算数运算能力较强,可读性高等功能,由于本系统处理的数据较多,较复杂,利用c语言的完全可以体现出来。单片机是由c语言设计,设备正常工作的核心程序。作用是接受红外线传感器2、摄像头4和激光雷达3实时传输的数据上传单片机中,芯片进行接收和处理进行常规避让障碍物,规划最短前进路线。语音模块接收到外界语音信息后单片机根据准备好的应答进行回馈。可触摸屏与单片机实时通
信传输数据,根据用户的需求执行相应任务。本装置还包括线上点餐系统,线上点餐系统分为乘客端、服务器端和管理端。使用者通过扫描二维码打开微信小程序进行食物的挑选以及下单,这些数据都将会传输到以spring boot为框架搭建的后端服务器上,管理员在pc端使用以vue为前端框架搭建的页面上对乘客传输过来的订单需求进行分配管理,再由送餐机器人送到乘客面前。同时,乘客端可以通过微信小程序观察到为自己配送机器人的位置。
39.视频传输是由客户端连接端口后,发送需要协商的分辨率和帧数,使传输图像的属性一致,客户端使用线程,对图片进行收集,对收到的每一张图片进行解码,并利用 opencv 播放出来,图片按照提前协商好的分辨率和帧数进行打包编码传输,利用服务器端打开端口,在连接客户端后,便可以在客户端中捕获到服务器端的每一帧图片,即可实现服务器端与客户端两端的实时视频传输。
40.使用opencv摄像头获取人脸信息,调用opencv内部函数进行人脸模型训练,基于 opencv 中iplimage类中图像读取函数将待识别的人脸图片读入系统使用lbp算法提取待识别图像的特征,将待识别图像的特征与人脸模型的特征进行比较,在满足一定阈值的基础上,相似度最好的那个模型就视为此人脸的最终识别结果。
41.为了使机器人在能够保障每个物品独立安全运送的前提下,尽可能多的运送乘客所需要的物品。并且考虑到工作环境的狭小限制,所以整个送餐机器人就显得小巧瘦高,长为1.2m,高为1.4m,宽为0.8m。因为立方体的外观设计,才会有效的利用车厢内过道的空间。因此,采用了独立的储物柜的模式,来安排送餐机器人的储存空间。储物柜具体为,第二储物柜6为16个,尺寸为20x25cm,第一储物柜5为28个,尺寸为10x10cm,深度都为30cm,储物柜以电磁锁扣关闭储物柜的小门,达到保护储物柜内物品的目的。
42.激光雷达3扫描数据是以移动机器人为中心360
°
范围内的障碍物距离值,设置躲避障碍物距离阈值。通过vfh算法的结果判断当前状态下的行驶方向,为了能够达到平滑转弯的效果,针对行驶方向进行优化,在确定机器人的行驶方向角度后,使用一个局部目标点来代替行驶方向,该目标点根据每次的行驶方向的不同在不断更新和调整,直到到达目的地为止。
43.通过上述技术方案得到的装置是一种服务型高铁送餐机器人,本装置结构灵活,能够适应列车狭小空间的需要。
44.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化;凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。