1.本公开总体上涉及图像传感器领域。更具体地,本公开涉及一种图像传感器,该图像传感器包括像素矩阵,该像素矩阵形成在半导体衬底中以及在半导体衬底上并且被微透镜矩阵加盖。
背景技术:
2.图像传感器通常包括多个像素,这些像素形成在半导体衬底中以及在半导体衬底上,并且以矩阵的形式被布置在行和列中。每个像素通常包括感光区域以及一个或多个控制晶体管,入射光在该感光区域中被转换成电子
‑
空穴对,一个或多个控制晶体管使得可以读取表示感光区域中光生电荷量的信号。因此,像素的感光区域仅占据像素表面的一部分。为了补偿收集表面的与像素的填充因子有关的损失,并且提高像素的灵敏度,已经提出了在每个像素上布置微透镜,该微透镜基本上在像素的整个表面上延伸,并且被配置为将入射光汇聚在像素的感光区域上。
3.期望的是,至少部分地改进已知的图像传感器的某些方面,已知的图像传感器包括像素矩阵,该像素矩阵形成在半导体衬底中以及在半导体衬底上并且由微透镜矩阵加盖。
技术实现要素:
4.鉴于上述问题,本实用新型旨在提供一种改进的图像传感器,其补偿了收集表面的与像素的填充因子有关的损失,并且提高像素的灵敏度。
5.根据本公开的一个或多个方面,提供了一种图像传感器,包括:半导体衬底;多个像素,形成在半导体衬底中以及在半导体衬底上,并且以具有n行和m列的矩阵的形式布置,其中n是大于或等于1的整数,并且m是大于或等于2的整数;以及多个微透镜,面向衬底,微透镜中的每个微透镜与相应的像素相关联,微透镜以矩阵形式被布置在n行和 m列中,其中,在像素矩阵的行的方向上,微透镜矩阵的间距大于像素矩阵的间距。
6.在一个或多个实施例中,每个微透镜的光轴线穿过与该微透镜相关联的像素的感光区域的中心。
7.在一个或多个实施例中,微透镜矩阵包括离轴微透镜。
8.在一个或多个实施例中,n大于或等于2,并且其中,在像素矩阵的列的方向上,微透镜矩阵的间距大于像素矩阵的间距。
9.在一个或多个实施例中,在像素矩阵的行的方向上以及在像素矩阵的列的方向上,多个像素中的像素具有相同的大小。
10.在一个或多个实施例中,在像素矩阵的行的方向上以及在像素矩阵的列的方向上,多个微透镜中的微透镜都具有相同的尺寸。
11.在一个或多个实施例中,在像素矩阵的行的方向上或在像素矩阵的列的方向上,多个微透镜中的微透镜具有不同的尺寸。
12.在一个或多个实施例中,每个微透镜的表面积对应于微透镜的中心轴线和与该微透镜相关联的像素的中心轴线之间的距离。
13.在一个或多个实施例中,还包括布置在像素矩阵与微透镜矩阵之间的光学间隔物。
14.在一个或多个实施例中,光学间隔物包括透明平面层。
15.在一个或多个实施例中,微透镜是折射微透镜或衍射微透镜中的至少一种。
16.在一个或多个实施例中,微透镜是菲涅耳波带片类型的衍射微透镜。
17.在一个或多个实施例中,微透镜是超表面类型的衍射微透镜。
18.根据本公开的一个或多个方面,提供了一种图像传感器,包括:衬底,包括以矩阵形式布置的多个像素;以及多个微透镜,以矩阵形式被布置在衬底上,并且覆盖多个像素,微透镜中的每个微透镜与相应的像素相关联,并且具有比相关联的像素大的大小,微透镜的矩阵向外延伸超出像素的矩阵的外围。
19.在一个或多个实施例中,每个微透镜的中心相对于相关联的像素的中心偏移。
20.在一个或多个实施例中,沿着行方向和列方向,微透镜矩阵的间距大于像素矩阵的间距。
21.在一个或多个实施例中,多个微透镜包括具有第一形状的第一微透镜以及横向地围绕第一微透镜的第二微透镜,第二微透镜具有与第一形状不同的第二形状。
22.在一个或多个实施例中,还包括在像素矩阵与微透镜矩阵之间的透明平面层,透明平面层具有在从5μm至50μm的范围内的厚度。
23.通过使用根据本公开的实施例,可以至少解决前述问题的至少一部分,并实现相应的效果,例如补偿收集表面的与像素的填充因子有关的损失,并且提高像素的灵敏度。
附图说明
24.在对具体实施例的以下描述中详细描述上述特征和优点、以及其他特征和优点,这些具体实施例通过参考附图以说明而非限制的方式给出,其中:
25.图1a示意性地示出了图像传感器的示例的俯视图;并且图1b示意性地示出了图1a所示的图像传感器的横截面图;
26.图2a示意性地示出了根据一个实施例的图像传感器的示例的俯视图;并且图2b示意性地示出了图2a所示的图像传感器的横截面图;
27.图3示意性地示出了图2a和图2b的图像传感器的示例微透镜;
28.图4图示了图2a和图2b的图像传感器的变型;
29.图5示出了图2a和图2b的图像传感器的另一实施例变型;
30.图6示出了图5的图像传感器的微透镜的示例性实施例;
31.图7示出了图2a和图2b的图像传感器的另一实施例变型;
32.图8示出了图2a和图2b的图像传感器的另一实施例变型;以及
33.图9示出了图2a和图2b的图像传感器的另一实施例变型。
具体实施方式
34.为此,一个实施例提供了一种图像传感器,该图像传感器包括:多个像素,这些像
素形成在半导体衬底中以及在半导体衬底上,并且以具有n行和m列的矩阵的形式布置,其中n是大于或等于1的整数,并且m是大于或等于2的整数;以及,对于每个像素,与像素相关联的微透镜,该微透镜面向衬底,微透镜以矩阵形式被布置在n行和m列中,其中,在像素矩阵的行的方向上,微透镜矩阵的间距大于像素矩阵的间距。
35.根据一个实施例,每个微透镜的光轴线穿过与其相关联的像素的感光区域的中心。
36.根据一个实施例,微透镜矩阵包括离轴微透镜。
37.根据一个实施例,n大于或等于2,并且,在像素矩阵的列的方向上,微透镜矩阵的间距大于像素矩阵的间距。
38.根据一个实施例,在像素矩阵的行的方向上以及在像素矩阵的列的方向上,多个像素中的像素具有相同的大小。
39.根据一个实施例,在像素矩阵的行的方向上以及在像素矩阵的列的方向上,多个微透镜中的微透镜都具有相同的尺寸。
40.根据一个实施例,在像素矩阵的行的方向上和/或在像素矩阵的列的方向上,多个微透镜中的微透镜具有不同的尺寸。
41.根据一个实施例,当微透镜的中心轴线和与其相关联的像素的中心轴线之间的距离大时,每个微透镜的表面都较大。
42.根据一个实施例,传感器包括布置在像素矩阵与微透镜矩阵之间的光学间隔物。
43.根据一个实施例,微透镜是折射微透镜或衍射微透镜。
44.根据一个实施例,微透镜是fzp类型的衍射微透镜。
45.根据一个实施例,微透镜是超表面(meta
‑
surface)类型的衍射微透镜。
46.在各个附图中,相同的特征已经由相同的附图标记表示。特别地,在各个实施例中共有的结构特征和/或功能特征可以具有相同的附图标记,并且可以具有相同的结构特性、尺寸特性和材料特性。
47.为了清楚起见,仅图示和详细描述了对于理解本文所描述的实施例有用的操作和元件。特别地,没有详细描述所公开的图像传感器的像素矩阵和外围控制电路的实施例,所公开的实施例与这些元件的常规实施例兼容。
48.除非另有说明,否则当提及被连接在一起的两个元件时,这意味着在没有除了导体以外的任何中间元件的情况下的直接连接,并且当提及耦合在一起的两个元件时,这意味着这两个元件可以被连接或者这两个元件可以经由一个或多个其他元件被耦合。
49.在以下公开内容中,除非另有说明,否则当提及绝对位置限定词(诸如术语“前”、“后”、“顶”、“底”、“左”、“右”等)或相对位置限定词 (诸如术语“上方”、“下方”、“高于”、“低于”等)或定向限定词(诸如“水平”、“竖直”等)时,参考附图中所示的取向,并且应当理解,在实践中,所描述的装置可以不同地定向。
50.除非另有说明,否则表述“约”、“大约”、“基本上”和“近似”表示在10%以内,并且在一些实施例中,在5%以内。
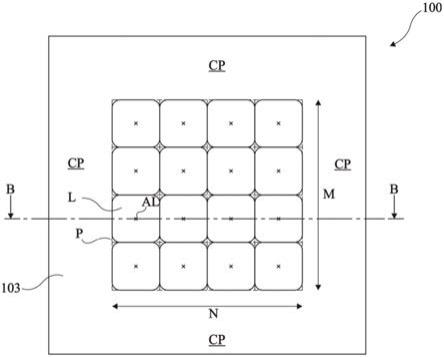
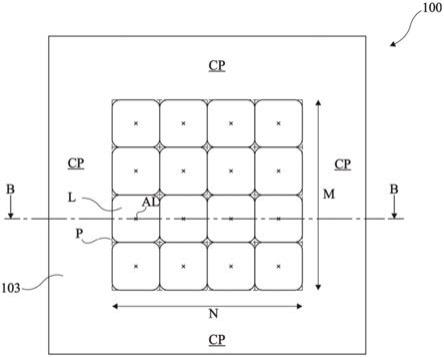
51.图1a和图1b示意性地示出了图像传感器100的示例。图1a和图 1b更具体地包括传感器100的俯视图(图1a)和沿平面b
‑
b的横截面图(图1b)。
52.传感器100包括形成在例如由硅制成的半导体衬底101中以及在该半导体衬底101
上的多个像素p。像素p例如具有相同的尺寸,以在任何加工分散内。例如,在俯视图中,像素p具有正方形或矩形形状。在附图中,像素p由虚线横向地界定。像素p规则地布置在m列乘n行的矩阵中,其中m和n是大于或等于2的整数。在所图示的示例中,已经示出了m=4乘n=4个像素的矩阵。在实践中,矩阵可以包括更多的行和列。
53.每个像素包括形成在衬底101中的感光区域pd。每个像素还可以包括控制元件,例如一个或几个控制晶体管(在图中未详细描述),这些控制元件形成在衬底101中以及在衬底101上,例如,在像素的外围区域中、在像素的感光区域pd周围(在俯视图中)。
54.传感器100还包括外围电路cp(在图中未详细描述),该外围电路 cp形成在衬底101中以及在衬底101上,并且布置在传感器的外围区域中、在像素矩阵p周围(在俯视图中)。外围电路cp可以例如包括电源、像素矩阵p的控制和/或读取电路、以及/或者用于将传感器连接到外部设备的金属化层(metallization)。
55.图1a和图1b在衬底101的上表面的一侧上还示出了绝缘层和导电层(在图中未详细描述)的堆叠,也称为互连堆叠,在该堆叠上可以形成迹线、过孔和金属接触部,以用于将像素p与传感器的外围电路cp 互连。在所示的示例中,互连堆叠103被布置在衬底101的照明面的一侧上,也就是说,在图1b的横截面图的定向中,互连堆叠103被布置在衬底101的上表面的一侧上。这就是所谓的正面照明(fsi)传感器。作为变型,互连堆叠103可以被布置在与衬底101的照明面相对的一侧上,也就是说,在图1b的横截面图的定向中,互连堆叠103被布置在衬底101的下表面的一侧上。这就是所谓的背面照明(bsi)传感器。尽管附图中所示出的示例和本公开中所公开的示例均与fsi类型的传感器有关,但是所公开的实施例当然可以被配置用于bsi类型的传感器。
56.对于每个像素p,传感器100还包括微透镜l,该微透镜l被布置在像素的照明面上,也就是说,在图1b的横截面图的定向中,该微透镜l被布置像素的上表面上。在所图示的示例中,从上方看,每个微透镜l具有与位于下面的像素p的表面基本上相等的表面,并且基本上被布置在位于下面的像素p之上。因此,微透镜l的集合限定了一个具有 m
×
n个微透镜的矩阵,微透镜矩阵l的间距(即,微透镜矩阵的两个相邻微透镜之间的中心距离)和像素矩阵p的间距(即,像素矩阵的两个相邻像素之间的中心距离)在行的方向上基本相同,并且微透镜矩阵 l的间距和像素矩阵p的间距在列的方向上基本相同。
57.每个微透镜l被配置为将在其上表面上接收到的光朝向下面的像素的感光区域pd汇聚。在该示例中,每个微透镜l的光轴线al基本上与衬底101的上表面正交(在图1b的横截面图的定向中为竖直),从上方看,该光轴线al穿过像素的感光区域pd的中心(在该示例中,与像素的中心重合)。
58.在图1a和图1b的示例中,认为光以法向入射的方式到达传感器 100的上表面。在具有大尺寸的传感器被配置为放置在紧凑物镜后面的情况下,例如,在嵌入在智能电话中的图像传感器的情况下,光通常以法向入射的方式到达位于像素矩阵中心附近的像素,但是可以以相对强的倾斜度到达位于像素矩阵边缘附近的像素。在这种情况下,可以使用具有比像素p的尺寸稍小的尺寸的微透镜l,并且在偏移随着微透镜远离传感器中心移动而增大的同时,使微透镜朝向传感器的中心偏移,以便补偿入射光的倾斜,例如,以在h.
‑
j.hsu,f.
‑
t.weng,c.
‑
k.chang和 y.
‑
k.hsiao的文章“microlens design for compact lens system”(proc.spie5116,smart sensors,actuators,and mems,(april 24,2003))中所
描述的方式。在这种情况下,在行的方向上和在列的方向上,微透镜矩阵l的间距可以小于像素矩阵p的间距。
59.作为示例,微透镜l可以通过树脂接触蠕变形成,可选地随后进行形状变换,例如,以在y.
‑
t.fan,c.
‑
s.peng和c.
‑
y.chu的文章“advancedmicrolens and color filter process technology for the high
‑
efficiency cmosand ccd image sensors”(spie,2000,vol.4115,p.263
‑
274)以及p.
‑
c. huang,c.
‑
h.ting,k.
‑
f.huang和t.
‑
s.tzeng的文章“a microlens reactiveion etching process study on cmos image sensor
‑
wen
‑
hao lo”(2018e
‑
manufacturing &design collaboration symposium(emdc),p.1
‑
3)中所公开的方式。作为变型,可以通过纳米印刷来形成微透镜l,例如,以在 c.peng,x.liang,z.fu和s.y.chou的文章“high fidelity fabrication ofmicrolens arrays by nanoimprint using conformal mold duplication andlow
‑
pressure liquid material curing”(j.vac.sci.technol.b microelectron. nanometer struct,vol.25,no 2,p.410,2007)中所描述的方式,或者可以通过灰度光刻来形成微透镜l,例如,以在s.audran等人的文章“grayscalelithography process study applied to zero
‑
gap microlenses for sub
‑
2μmcmos image sensors”(proceedings of spie,2010,p.763910
–
763910)中所公开的方式。
60.上面所公开的方法导致形成平凸(planar
‑
convex)类型的折射微透镜,也就是说,该折射微透镜包括与像素的上表面接触的基本上平坦的下表面或底座以及凸的上表面。作为变型,微透镜l可以由工作在受限的波长范围内的衍射结构构成,例如,以在k.onozawa等人的文章“a mos image sensor with a digital
‑
microlens”(ieee trans.electrondevices,vol.55,no 4,p.986 991,apr.2008)或者a.r.ximenes,p. padmanabhan,m.j.lee,y.yamashita,d.n.yaung和e.charbon的文章“a 256x256 45/65nm 3d
‑
stacked spad
‑
based direct tof image sensor forlidar applications with optical polar modulation for up to 18.6dbinterference suppression”(2018ieee international solid
‑
state circuitsconference
‑
(isscc),2018,p.96 98)中所公开的方式。作为变型,微透镜 l是超表面透镜,例如,如在a arbabi等人的文章“subwavelength
‑
thicklenses with high numerical apertures and large efficiency based onhigh
‑
contrast transmitarrays”(nature communications,vol.6,p.7069,may2015)或者m.gonidec的文章“concept of non
‑
periodic metasurfaces basedon positional gradients applied to ir
‑
flat lenses”(opt.mater.express 7, 2346
‑
2351(2017))中所公开的。
61.图1a和图1b的传感器的一个局限性在于由外围电路cp占据的表面没有用于收集光。
62.根据一个实施例的一个方面,提供了一种图像传感器,该图像传感器包括:形成在半导体衬底中以及在半导体衬底上的像素矩阵;以及加盖像素矩阵上的微透镜矩阵,其中微透镜的尺寸大于像素的尺寸,通过将由电路cp在像素矩阵的外围占据的全部或部分表面用作光收集表面,这使得对于每个像素可以获得较大的光收集表面。于是,微透镜矩阵的间距大于像素矩阵的间距。因此,相对于微透镜的尺寸小于或等于像素的尺寸的传感器,该传感器具有提高的灵敏度。
63.图2a和图2b示意性地示出了根据一个实施例的图像传感器200的示例。图2a和图
2b更具体地包括传感器200的俯视图(图2a)和沿平面b
‑
b的横截面图(图2b)。
64.图2a和图2b的传感器200与图1a和图1b的传感器100的主要区别在于其微透镜矩阵的尺寸。
65.类似于图1a和图1b的示例,传感器200每个像素p包含一个微透镜l,或m
×
n个微透镜l,微透镜l被布置在传感器的照明面的一侧上,也就是说,在图2b的横截面图的定向中,微透镜l被布置在传感器的上表面的一侧上。
66.在图2a和图2b的示例中,在俯视图中,每个微透镜l的表面都大于与该微透镜l相关联的像素p的表面。更具体地,在行的方向上和在列的方向上,每个微透镜的尺寸都大于与该微透镜相关联的像素p的尺寸。与在图1a和图1b的示例中类似地,微透镜l是共面的,也就是说,微透镜l的基本上平面的底座被布置在同一平面中,在所示的示例中,该平面对应于互连堆叠103的上表面。因此,在俯视图中,在行的方向上和在列的方向上,微透镜矩阵l的尺寸大于像素矩阵p的对应尺寸,并且在行的方向上和在列的方向上,微透镜矩阵l的间距大于像素矩阵 p的间距。因此,微透镜矩阵l不仅在像素矩阵p的整个表面上延伸,而且还在传感器的由外围电路cp占据的整个或部分外围表面上延伸。相对于图1a和图1b的示例,这使得可以增大每个像素p的收集表面,并且因此可以提高传感器的灵敏度。应当注意的是,如果电路cp在传感器的上表面的一侧上包括用于将传感器连接到外部设备的金属化层,则这些金属化层应当保持可被接入,并且因此不应当被微透镜覆盖。因此,传感器的连接金属化层将限制用于扩展微透镜矩阵的可用表面。
67.在图2a和图2b的示例中,在俯视图中,m
×
n个微透镜l都具有基本上相同的形状,例如正方形或矩形形状,并且具有相同的尺寸(以在任何加工分散中),并且被均匀地分布在行和列中。换句话说,在行的方向上和在列的方向上,微透镜矩阵l的间距是恒定的。
68.具有m
×
n个微透镜的矩阵的每个微透镜l都配置为将在其上表面接收到的光与与其相关联的像素p(即,在m
×
n个像素的子矩阵中具有相同坐标的像素p)的感光区域pd汇聚在一起。在该示例中,每个微透镜l的光轴线al基本上与衬底101的上表面正交(在图2b的横截面图的定向中为竖直),从上方看,该光轴线al穿过像素的感光区域pd的中心(在该示例中,与像素的中心重合)。
69.在图2a和图2b的示例中,微透镜l是所谓的离轴(off
‑
axis)微透镜,即,在俯视图中透镜的光轴线不在透镜中心的微透镜,这使得可以确保:即使像素矩阵和微透镜矩阵之间在间距上不同,由每个微透镜接收的光仍然可以聚焦在相应像素的感光区域pd中。
70.微透镜l例如是通过纳米印刷或灰度光刻形成的折射微透镜,或者是由纳米元件的衍射阵列形成的衍射透镜(也称为超表面),例如,通过构造平面层而形成。
71.图3示意性地示出了图2a和图2b的图像传感器的示例微透镜。
72.在该示例中,微透镜是菲涅耳波带片(fzp)类型的衍射微透镜,每个衍射微透都由通过光刻和蚀刻平面层形成的、同心的环或环部分的阵列构成。在图3中,出于简化目的并且由于微透镜矩阵相对于其水平中心轴线和竖直中心轴线的对称性,仅示出了四个微透镜l,这四个微透镜l分别对应于构成图2a中的俯视图的微透镜矩阵的左上象限的四个微透镜。
73.每个微透镜l的光轴线与形成微透镜的同心的环或环部分的中心重合。如上所述,微透镜l是离轴微透镜,该离轴微透镜在图3的示例中通过以下事实获得:形成每个微透镜
的同心的环或环部分的中心相对于微透镜的中心偏移。对于传感器的某些微透镜l,微透镜的光轴线可以不穿过微透镜。于是,在图3的示例中,微透镜仅由中心位于微透镜外部的同心的环部分构成。
74.图4是在与图2b的横截面图相同的平面中的横截面图,图4图示了图2a和图2b的图像传感器的变型。
75.图4的传感器400与图2a和图2b的传感器200的不同之处在于:图4的传感器400在互连堆叠103的上表面与微透镜矩阵l的下表面之间还包括呈透明平面层形式的光学间隔物401,该光学间隔物401的厚度例如为5μm至50μm,例如约10μm。间隔物401使得可以限制或消除入射光与传感器的外围电路cp和/或与传感器的像素p的互连金属化层的任何杂散的相互作用。
76.应当注意,以上关于图2a和图2b至图4公开的实施例对于低分辨率传感器特别有利,例如对于m和n小于或等于100。实际上,为了保持良好的光收集效率,优选的是,微透镜的光轴线与像素的中心轴线之间的偏移保持受限。在此,x=x*pp表示在传感器的微透镜l的光轴线与对应的像素p的中心轴线之间所容许的最大偏移,其中,优选地x小于或等于2,并且pp表示像素矩阵的间距。利用pl表示微透镜矩阵的间距:pl=(m 2*x)/(m
‑
1)*pp。于是,灵敏度中的贡献增益g为:g= ((m 2*x)/(m
‑
1))2(在m=n的情况下并且考虑到一方面像素和另一方面微透镜在行的方向上和在列的方向上具有相同的尺寸)。对于x=2和 m=n=100,可以获得g=1.1036,或大约10%的增益。
77.上面所公开的实施例在包括共享同一外围电路cp的小的spad(单光子雪崩二极管)矩阵的传感器中特别有利,例如,m和n小于或等于 10的m
×
n spad矩阵,例如m=n=4。
78.特别地,小的spad矩阵可以用于形成sipm(硅光电倍增管)类型的传感器。在这种情况下,m
×
n个spad并联连接,这特别地使得可以提高动态或添加时间相关性过滤器以便过滤检测到的事件。例如,当希望确定激光脉冲的到达时间时,可以仅考虑在被限制到激光脉冲宽度的时间窗口中生成的事件。然后,将m
×
n spad矩阵视为图像的空间分辨率元素。因此,对图像内的空间采样没有限制。在这种情况下,微透镜可以具有不规则的空间分布。特别地,微透镜矩阵可以包括具有不同尺寸的微透镜。特别地,这使得可以补偿微透镜效率的任何差异,该效率取决于微透镜在矩阵中的位置。实际上,取决于用于制造微透镜的技术,并且特别是在衍射结构的情况下,当微透镜的光轴线与微透镜的中心之间的偏移增大时,微透镜的光收集效率可能会降低。为了补偿这种降低,可以根据微透镜的光轴线相对于微透镜的中心的偏移来改变微透镜的表面。
79.图5是在与图2a的俯视图相同的定向上的俯视图,图5图示了图2a和图2b的图像传感器的变型。图5的传感器500与图2a和图2b的传感器200的主要区别在于m
×
n个微透镜l的形状。
80.在图5的示例中,微透镜可以根据其在微透镜矩阵中的位置而具有不同的形状和/或尺寸,并且应当理解,每个微透镜的总表面积大于与其相关联的像素的表面。在图5的示例中,m
×
n个微透镜都具有正方形或矩形形状,但是当微透镜的光轴线相对于透镜中心的偏移是显著的时,微透镜具有较大的表面。
81.图6示意性地示出了图5的图像传感器的微透镜l的示例。在该示例中,与在图3的示例中类似地,微透镜l是fzp类型的衍射微透镜,这些衍射微透镜由通过光刻和蚀刻平面
层形成的、同心的环或环部分构成。在图6中,出于简化目的,仅示出了四个微透镜l,这四个微透镜 l分别对应于构成图5中的微透镜矩阵的右上象限的四个微透镜。
82.图7和图8是在与图5相同的定向中的俯视图,图7和图8图示了图5的传感器的两个变型。图7和图8的传感器700和800与图5的传感器500的不同之处主要在于它们的m
×
n个微透镜l的形状,它们不一定是矩形的。在图7的传感器700中,微透镜矩阵包括矩形微透镜和非矩形微透镜。在图8的传感器800中,微透镜矩阵仅包括非矩形微透镜。
83.图9是在图2a的俯视图的定向中的俯视图,图9图示了图2a和图 2b的传感器的另一实施例变型。图9的传感器900与图2a和图2b的传感器的主要不同之处在于,图9的传感器900不涉及二维传感器(m 和n大于或等于2),而涉及线性传感器,该线性传感器包括具有布置在一行中的m个像素的条带(m大于或等于2并且n=1)。
84.与在图2a和图2b的示例中类似地,在俯视图中,每个微透镜l的表面都大于与其相关联的像素p的表面。更具体地,在像素的排列方向上,每个微透镜的尺寸大于与其相关联的像素p的尺寸。因此,在像素 p的排列方向上,微透镜条带l的间距大于像素矩阵p的间距。这使得可以增大每个像素p的收集表面,并且因此可以提高传感器的灵敏度。
85.已经描述了各个实施例和变型。本领域技术人员将理解,可以组合这些实施例的某些特征,并且本领域技术人员将容易想到其他变型。特别地,图4的变型可以与图5、图7、图8或图9的变型组合。此外,图 5、图7或图8的变型可以适于图9的变型。
86.最后,基于上文提供的功能描述,本文所描述的实施例和变型的实际实现在本领域技术人员的能力之内。
87.上述各个实施例可以被组合来提供其他实施例。
88.可以根据以上详细描述来对实施例进行这些和其他改变。通常,在所附权利要求书中,所使用的术语不应当被解释为将权利要求书限制为说明书和权利要求书中所公开的特定实施例,而应当被解释为包括这样的权利要求所要求保护的所有可能的实施例以及等同物的全部范围。因此,权利要求不受公开内容的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。