1.本发明是有关一种图像资源更新共享系统及方法,特别是指路口动态图像资源更新共享系统及方法。
背景技术:
2.随着智能运输系统(intelligent transport system,its)的发展,自动驾驶车辆(自驾车)将成为未来主流的交通方式之一,自驾车能行驶于道路,主要是依据电脑实施导航决策;其中,自驾车可设有例如摄影机、光学雷达(lidar)、全球导航卫星系统(gnss)与惯性导航系统(ins)
…
等检测单元,用以定位自驾车的位置与检测自驾车周遭物件,所述物件例如其他车辆或行人,自驾车可根据检测单元的检测数据进行导航决策。
3.有别于实验室或测试场地那样受控的道路环境,实际道路有各式车辆与行人,甚至有违规的车辆与行人,例如超速、闯红灯等,尤其在路口处(例如叉路或十字路口),车辆与行人从不同方向穿越路口。由此可见,对于自驾车来说,顺利通过路口是一重要课题。
4.然而,现有自驾车的检测范围有限,其检测范围仅限于自驾车本身的周遭区域,路口车辆与行人却来自四面八方,故有些路口路况(尤其是离自驾车较远的路况)是自驾车检测不到的,导致现有自驾车通过路口时,无法有效全面掌握路口信息,从而无法执行更全面性的导航决策。
技术实现要素:
5.有鉴于此,本发明的主要目的是提供一种路口动态图像资源更新共享系统及方法,以期克服背景技术所述自驾车的检测范围有限的缺点。
6.本发明路口动态图像资源更新共享系统包含:
7.一车上检测装置,设置在一车辆,供检测该车辆的周遭物件并周期地输出一检测信息,该检测信息包含该车辆的一绝对定位坐标、一本车航向、一本车速度、至少一物件与该车辆的一相对速度以及该至少一物件与该车辆的一原始相对坐标;以及
8.一运算装置,储存一路口区域图像资源,该路口区域图像资源建立在一大地坐标系统,该大地坐标系统包含一参考方位;
9.其中,当该运算装置从该车上检测装置接收该检测信息,该运算装置将该车辆的该绝对定位坐标加上一本车预估坐标位移量而得到一匹配绝对坐标,以及将该至少一物件与该车辆的该原始相对坐标加上一物件预估坐标位移量而得到一匹配相对坐标,其中,该本车预估坐标位移量是根据该本车速度与一时间差计算而得,该物件预估坐标位移量是根据该相对速度与该时间差计算而得;该运算装置根据该本车航向与该参考方位将该匹配相对坐标进行坐标旋转转换以形成一匹配转换坐标,再将该匹配绝对坐标与该匹配转换坐标合并至该路口区域图像资源以成为一路口动态图像资源,并对外分享该路口动态图像资源。
10.本发明路口动态图像资源更新共享方法于一运算装置执行,该方法包含:
11.接收至少一车上检测装置输出的一检测信息,该检测信息包含一车辆的一绝对定位坐标、该车辆的一本车航向、一本车速度、至少一物件与该车辆的一相对速度以及该至少一物件与该车辆的一原始相对坐标;
12.将该车辆的该绝对定位坐标加上一本车预估坐标位移量而得到一匹配绝对坐标,以及将该至少一物件与该车辆的该原始相对坐标加上一物件预估坐标位移量而得到一匹配相对坐标,其中,该本车预估坐标位移量是根据该本车速度与一时间差计算而得,该物件预估坐标位移量是根据该相对速度与该时间差计算而得;
13.根据该车辆的该本车航向与一大地坐标系统的一参考方位将该匹配相对坐标进行坐标旋转转换以形成一匹配转换坐标;
14.将该匹配绝对坐标与该匹配转换坐标合并至一路口区域图像资源以成为一路口动态图像资源;以及
15.对外分享该路口动态图像资源。
16.综上所述,本发明分享的路口动态图像资源可呈现通过路口的物件位置,举例来说,当十辆配备有本发明车上检测装置的自驾车从四面八方通过路口,这十辆自驾车将本身的检测信息提供给该运算装置,供该运算装置产生并分享该路口动态图像资源。如此一来,通过路口的自驾车可接收该路口动态图像资源,即可从该路口动态图像资源获得其车上检测装置的检测范围以外的路况信息(即其他自驾车产生的检测信息),尤其该路口动态图像资源的物件位置是预估的,其比较接近路口动态图像资源广播当下的实际路况,而非较早路况,自驾车即可根据该路口动态图像资源进行全面性的导航决策,确保行车安全,故克服背景技术所述问题。
附图说明
17.图1:本发明路口动态图像资源更新共享系统的方块示意图。
18.图2:本发明路口动态图像资源更新共享系统的使用情境示意图。
19.图3:本发明的运算装置根据检测信息产生路口动态图像资源的示意图。
20.图4:本发明的检测信息的方块示意图。
21.图5:本发明广播路口动态图像资源的时间示意图。
22.图6:本发明实施例中,多个车上检测装置分别产生检测信息的示意图。
23.图7:本发明进行坐标旋转转换的示意图。
24.图8:本发明的路口动态图像资源的示意图。
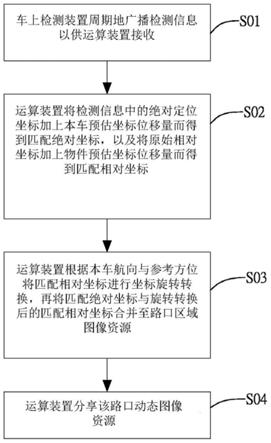
25.图9:本发明路口动态图像资源更新共享方法的流程示意图。
具体实施方式
26.请配合参考图1,本发明路口动态图像资源更新共享系统的实施例包含至少一车上检测装置10与至少一运算装置11,或进一步包含至少一物件检测装置12,该车上检测装置10供设置于一车辆,该物件检测装置12供架设于一路口。整体来看,本发明是藉由该车上检测装置10或进一步结合该物件检测装置12去检测该车辆周遭或位在该路口的该物件位置,并周期性地将其检测结果传送到该运算装置11,其中,该物件为被检测到的物体,例如可为各式车辆、行人或其它物体(例如散落物)。该运算装置11将接收到的检测结果进行匹
配(match)并合并(merge)于一路口区域图像资源以形成一路口动态图像资源;该运算装置11可周期性广播该路口区域图像资源,以分享该路口动态图像资源至一接收装置13,该接收装置13例如自驾车、车上影音导航装置或使用者电子装置(如智能手机)
…
等,供该接收装置13接收该路口动态图并加以运用。本发明进一步的技术细节说明如后。
27.在本发明的实施例中,请参考图2与图3,各该车上检测装置10可安装在行驶在道路的一车辆20,该车辆20可例如为自动驾驶车辆(自驾车)或非自驾车,该车上检测装置10可包含例如摄影机、光学雷达(lidar)、全球导航卫星系统(gnss)、惯性导航系统(ins)以及用以传输资料的无线通信模组,其定位功能、感知功能与资料传输功能为所属技术领域中的通常知识,在此不详述。是以,该车上检测装置10可周期性地输出一检测信息30,例如可通过(但不限于)专用短程通信技术(dsrc)广播该检测信息30,或通过移动通信技术(例如第五代(5g)或更高阶移动通信技术)输出该检测信息30,请参考图4,该检测信息30包含该车上检测装置10通过定位功能所产生各该车辆20的一绝对定位坐标31,以及包含通过感知功能产生至少一物件与该车辆20的至少一相对速度32、一本车航向33、该至少一物件与该车辆20的至少一相对坐标34与一本车速度35,其中,该本车航向33是指该车辆20的航向。在本发明实施例中,以下说明仅以该车辆20检测到一个物件为例说明,该检测信息30中的该相对坐标34定义为一原始相对坐标。
28.请配合参考图4,该绝对定位坐标31反映该车辆20在该路口区域图像资源的绝对位置,该相对坐标34反映该物件与该车辆20之间的相对位置。为方便说明,该绝对定位坐标31与该相对坐标34为x-y平面坐标系统的坐标值,其可与大地坐标(geodetic coordinates)系统的经度与纬度互相换算。
29.该运算装置11的一实施例可为设置在路口处的边缘运算(edge computing)装置,其包含无线通信模组与处理器,以供接收广播信息、处理信息以及对外广播信息,举例来说,该运算装置11可通过专用短程通信技术(dsrc)广播信息及接收信息,但不以此为限;故当该车辆20行经路口时,该车辆20的该车上检测装置10可广播其检测信息30,该运算装置11即可接收该检测信息30。此外,该运算装置11的另一实施例可为一云端服务器,该车上检测装置10可通过移动通信技术与该运算装置11建立连线,使该车上检测装置10与该运算装置11可通过移动通信技术进行该检测信息30的传输。
30.请参考图3,该运算装置11储存该路口区域图像资源110,该路口区域图像资源110可为高精度路口平面图,其可包含路口的车道标志信息(例如车道线或斑马线
…
等),其中,该路口区域图像资源110可建立在一大地坐标系统,该大地坐标系统包含一参考方位。举例来说,该路口区域图像资源110的范围可由该大地坐标系统的经度与纬度值指定划分,该参考方位可包含东方、西方、南方与北方。
31.以下通过范例说明本发明路口动态图像资源更新共享方法,本发明路口动态图像资源更新共享方法由该运算装置11执行。请参考图2、图3与图9,该运算装置11以边缘运算装置为例,当该车辆20行经路口时,如前所述,该车辆20的该车上检测装置10周期地广播该检测信息30以供该运算装置11接收(步骤s01)。每当该运算装置11接收到该检测信息30,该运算装置11将该检测信息30中的该绝对定位坐标31加上一本车预估坐标位移量(容后说明)而得到一匹配绝对坐标,以及将该原始相对坐标(即:该相对坐标34)加上一物件预估坐标位移量(容后说明)而得到一匹配相对坐标(步骤s02)。因为该匹配相对坐标仅呈现该物
件与该车辆20之间的一相对位置的关系,故该运算装置11进一步根据该本车航向33与该参考方位将该匹配相对坐标进行坐标旋转转换,以将该物件与该车辆20之间的该相对位置对应定位在该x-y平面坐标系统,再将对应该车辆20位置的该匹配绝对坐标与对应该物件位置的旋转转换后的该匹配相对坐标换算为经度与纬度后合并至该路口区域图像资源110,以成为一路口动态图像资源(步骤s03),并对外分享该路口动态图像资源(步骤s04),其分享方式例如可为通过专用短程通信技术(dsrc)的广播方式。
32.在步骤s02,关于该本车预估坐标位移量与该物件预估坐标位移量的产生,请参考图5并配参考图2至图4,当该车辆20位在一第一位置时,该车辆的该车上检测装置10整体而言花费δt
p
的时间进行信息运算以及花费δt
t
的时间进行信息传输,该车上检测装置10于一第一时间点t1广播该检测信息30,该检测信息30是该车上检测装置10对应在该第一位置时的检测结果;该车上检测装置10的广播周期可为t
r
,该运算装置11的广播周期可为t
b
;前述中,δt
p
、δt
t
、t
r
与t
b
是已知信息,可预设在该运算装置11,举例来说,δt
p
与δt
t
可分别为5毫秒(ms),t
r
可为125(ms),t
b
可为200(ms)。
33.由此可见,该运算装置11可在一第二时间点t2广播,该车辆20位于该第一位置的时间点与第二时间点t2具有进行信息运算与传输的一时间差δt,如依据前述的时间数据,δt即为85(ms)。该车辆20本身位置与该物件及该车辆20的该相对位置可能随时间而变,该本车预估坐标位移量与该物件预估坐标位移量即为该检测信息30在该时间差δt期间的多个预估变化量。如此一来,该运算装置11在该第二时间点t2所广播的该路口动态图像资源将比较符合该第二时间点t2的实际路况,而非较早路况。
34.该物件预估坐标位移量可表示如下:
[0035][0036]
上式中,x与y可分别代表x-y平面坐标系统的坐标轴;为该物件预估坐标位移量,为该物件与该车辆20的该相对速度32,δt为该时间差。故该匹配相对坐标可表示如下:
[0037][0038]
上式中,表示该匹配相对坐标,表示该原始相对坐标(即:该物件与该车辆20的该相对坐标34)。
[0039]
另一方面,该本车预估坐标位移量可表示如下:
[0040][0041]
上式中,x与y可分别代表x-y平面坐标系统的坐标轴,为该本车预估坐
标位移量,为该车辆20的该本车速度35,δt为该时间差。故该匹配绝对坐标可表示如下:
[0042][0043]
上式中,表示该车辆20的该匹配绝对坐标,表示该车辆20的该绝对定位坐标31。
[0044]
以下进一步配合图式说明本发明的使用情境。请参考图6所示的十字路口并配参考图2至图4,东西向车道上包含四辆自驾车与一台摩托车50,四辆自驾车分别为第一、第二、第四与第五自驾车41、42、44、45;南北向车道上包含第三、第六自驾车43、46与一非自驾车51,每辆自驾车41~46皆配备本发明的该车上检测装置10。
[0045]
该第一自驾车41的该车上检测装置10所检测到的物件包含该第二自驾车42,故该第一自驾车41所产生的一第一检测信息410中,该第一自驾车41与该第二自驾车42的原始相对坐标可呈现该第二自驾车42位于该第一自驾车41的左前方,该第一自驾车41的一第一本车航向331为东方。同理,该第二至第六自驾车42~46的该车上检测装置10的该第二至第六检测信息420~460可依此类推。
[0046]
各该自驾车41~46的该检测信息410~460传送到该运算装置11,该运算装置11进行如前所述的坐标匹配与合并,其中,以该第一自驾车41的该第一检测信息410为例,该第一自驾车41的该第一本车航向331为东方,该匹配相对坐标仅呈现该第二自驾车42位于该第一自驾车41的左前方,为了将相对位置关系的「前方」转变为该大地坐标系统的「东方」,所述相对位置的「前方」与「东方」相差90度,故可通过一旋转矩阵将该第一自驾车41的该匹配相对坐标进行坐标旋转转换,以使相对位置关系的「前方」转变为该大地坐标系统的「东方」。
[0047]
请配合参考图7,x
a
与y
a
分别代表x-y平面坐标系统的坐标轴,y
a
轴的箭号指向对应该大地坐标系统的北方,x
a
轴的箭号指向对应该大地坐标系统的东方,x
r
与y
r
为表示该物件与该车辆20之间相对位置关系的坐标轴,一般而言,前述坐标旋转转换可表示如下:
[0048][0049]
其中,为经过坐标旋转转换后的该匹配相对坐标,后称之为一匹配转换坐标,以反映物件位置;为旋转矩阵,θ
°
为旋转矩阵的旋转角度;上式的为该匹配相对坐标。
[0050]
若以图6的该第一检测信息410为例,以该第一自驾车41的该匹配绝对坐标为原点顺时针旋转90度,即θ
°
为90度,该第二至第六检测信息420~460的坐标转换可依此类推,惟需留意其相对位置关系的「前方」与该大地坐标系统的该参考方位的对应关系,以确认旋转
矩阵的旋转角度。
[0051]
请参考图8所示经合并后的该路口动态图像资源60,并配合参考图6,以该第一检测信息410与该第二检测信息420为例,该第一自驾车41的一第一匹配绝对坐标411的位置对应于从该第二检测信息420计算得到的一第一匹配转换坐标421,同样的,该第二自驾车42的一第二匹配绝对坐标422的位置对应于从该第一检测信息410计算得到的一第二匹配转换坐标412。
[0052]
该第三至第六自驾车43~46的情形可依此类推,简言之,该第四自驾车44的一第四匹配绝对坐标441的位置对应于从该第五检测信息450计算得到的一第四匹配转换坐标451,该第五自驾车45的一第五匹配绝对坐标452的位置对应于从该第四检测信息440计算得到的一第五匹配转换坐标442,该摩托车50的位置对应于从该第四检测信息440计算得到的一第三匹配转换坐标443,该非自驾车51的位置对应于从该第五检测信息450计算得到的一第六匹配转换坐标453以及从该第六检测信息460计算得到的一第七匹配转换坐标461,该第三自驾车43的一第三匹配绝对坐标431与该第六自驾车46的一第六匹配绝对坐标462则独立显示。
[0053]
综上所述,该路口动态图像资源60可呈现通过该路口的物件位置,如图6所示并配合参考图2至图4,以该第一自驾车41为例,虽然该第一自驾车41的该车上检测装置10的检测范围并未涵盖该第三至第六自驾车43~46、该摩托车50与该非自驾车51,但经由坐标转换与匹配后,配合图8所示的该路口动态图像资源60也可获得该第三至第六自驾车43~46、该摩托车50与该非自驾车51的即时动态,而当该运算装置11周期地广播该路口动态图像资源60时,该物件的位置周期地更新,该路口动态图像资源60使该物件有动态的呈现。
[0054]
是以,当自驾车行经该路口时可收到由该运算装置11所广播的该路口动态图像资源60,自驾车即可根据该路口动态图像资源60进行全面性的导航决策;另一方面,具接收广播讯息功能的车辆或使用者电子装置(例如智能手机)也可接收到由该运算装置11所广播的该路口动态图像资源60,以将该路口动态图像资源60显示给驾驶人或乘客检视,供驾驶人即时掌握路口路况,提升路口行车安全。
[0055]
另一方面,本发明的其他实施例可进一步包含该物件检测装置12,和该车上检测装置10相比,该物件检测装置12可固定架设在路边以检测路口的物件,且该物件检测装置12与该车上检测装置10所检测的物件可为相同或不同物件,需说明的是,该车上检测装置10所检测到的该至少一物件定义为至少一第一物件,该物件检测装置12所检测到的至少一物件定义为至少一第二物件。请参考图2与图3,该物件检测装置12亦可通过广播或移动通信技术将一辅助检测信息120传送信息给该运算装置11,该辅助检测信息120与该车上检测装置10产生的该检测信息30雷同,亦即该物件检测装置12亦可检测该路口的车辆、行人或其它物体(例如散落物)等该至少一第二物件,并将该辅助检测信息120传送到该运算装置11。不同的是,由于该物件检测装置12的位置是固定的,该辅助检测信息120并无如该检测信息30的该本车航向33与该本车速度35,该辅助检测信息120包含该物件检测装置12本身的一绝对定位坐标以及该至少一第二物件与该物件检测装置12之间的一相对速度与一相对坐标。
[0056]
由于该物件检测装置12的位置是固定的,该运算装置11可预设该物件检测装置12的该绝对定位坐标,且依前述步骤s02类推,该运算装置11根据该至少一第二物件与该物件
检测装置12之间的该相对速度以及进行信息运算与传输的一时间差产生一辅助坐标位移量(该辅助坐标位移量的运算相当于该物件预估坐标位移量),并将该至少一第二物件与该物件检测装置12之间的该相对坐标加上该辅助坐标位移量得到一辅助匹配坐标;该运算装置11可将该物件检测装置12的该绝对定位坐标直接加上该辅助匹配坐标即可定位该至少一第二物件的坐标位置,以转换为经度与纬度后合并于该路口动态图像资源60,该辅助匹配坐标可不需经过坐标旋转转换。
[0057]
前述说明该运算装置11为边缘运算装置的实施例,于其它实施例中,当该运算装置11为云端服务器时,可利用接收到的该些检测信息30与辅助检测信息120实施多元服务功能。举例来说,该运算装置11可储存从该物件检测装置12传来的每一笔该辅助检测信息120,每一笔该辅助检测信息120可包含多个第二物件的坐标,故该运算装置11可根据该多个第二物件中的其中的一第二物件的前后两笔坐标是否改变以判断该物件是否移动,并可累计各第二物件的一静止时间ts。该运算装置11可设有多个不同时间门槛值,该时间门槛值例如可包含一第一时间门槛值ta、一第二时间门槛值tb、一第三时间门槛值tc与一第四时间门槛值td,其中,ta>tb>tc>td,例如td可为1秒,tc可为1分钟,tb可为1小时,ta可为1个月。
[0058]
当ts<td,该运算装置11可判断该第二物件对应一动态物件信息,例如车辆或行人;当td<ts<tc,该运算装置11可判断该第二物件对应一半动态信息,例如事故、道路施工或塞车;依此类推,当tc<ts<tb,该运算装置11可判断该第二物件为一半静态信息;当tb<ts<ta,该运算装置11可判断该第二物件为一静态信息。藉由前述物件静止时间ts与各时间门槛值ta、tb、tc、td的判断,即可达成分类物件信息的服务功能,作为评估路口路况的参考。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。