1.本发明涉及车辆领域,特别地,涉及一种用于生成行驶工况的方法和装置。
背景技术:
2.在车辆(包括电动车辆、新能源车辆等)的设计研发阶段,需要根据行驶工况(driving cycle)来获知车辆的可能工作环境,从而基于车辆的可能工作环境,来设计和评估车辆的相关部件、例如驱动硬件,从而保证车辆的相关部件所需要的性能以及安全性和稳定性。
3.通常,在车辆的设计阶段所使用的行驶工况为标准行驶工况(如wltc、ftp等标准行驶工况),标准行驶工况通常可满足基本设计需求。此外,针对一些特定应用环境(例如,机场摆渡车、矿区工程车辆等的应用环境),还可使用在该特定环境下测量的测量行驶工况作为设计基础来进行车辆相关部件的设计。
4.然而,标准行驶工况仅涵盖通常的有限工作环境,而在车辆的实际使用中,实际工作环境可能与标准行驶工况所涵盖的工作环境很不相同,因此,在基于标准行驶工况来设计车辆的相关部件时,可能导致所设计的部件不能满足实际使用需求。此外,通常测量的测量行驶工况仅针对一种特定工作环境(例如,机场摆渡),因而测量行驶工况仅适用于在特定环境下工作的车辆的设计而不具有通用性,从而导致设计成本较高。
5.因此,现有的行驶工况难以满足不同客户的不同设计需求。
技术实现要素:
6.本发明的目的在于提供一种用于生成行驶工况的方法和装置。
7.根据本发明的一方面,提供一种用于生成行驶工况的方法,所述方法包括:获取测量的测量行驶工况数据;对测量行驶工况数据进行分类;获取预定类型的测量行驶工况数据的行驶工况区段;基于获取的各个行驶工况区段生成行驶工况。
8.可选地,对测量行驶工况数据进行分类的步骤包括:将测量行驶工况数据划分为多个区段;确定所述多个区段中的至少一个有效区段;将每个有效区段划分为至少一个子区段;提取每个子区段的测量行驶工况数据的特征向量;基于提取的特征向量对各个子区段的测量行驶工况数据进行分类。
9.可选地,将测量行驶工况数据划分为多个区段的步骤包括:通过测量行驶工况数据中包括的速度相对于时间的连续性,将测量行驶工况数据划分为多个区段。
10.可选地,确定所述多个区段中的至少一个有效区段的步骤包括:将所述多个区段中包括大于阈值数量的有效速度的区段确定为有效区段,其中,有效速度指示大于预定速度的速度,其中,所述速度包括在测量行驶工况数据中。
11.可选地,将每个有效区段划分为至少一个子区段的步骤包括:将每个有效区段中的测量行驶工况数据进行快速傅里叶变换,获得对应的频率域工况数据;根据预定阈值范围对频率域工况数据进行划分;将与频率域工况数据的划分结果对应的有效区段的各个部
分确定为所述至少一个子区段。
12.可选地,基于提取的特征向量对各个子区段的测量行驶工况数据进行分类的步骤包括:通过有监督学习方式或无监督学习方式对提取的特征向量进行分类,来对各个子区段的测量行驶工况数据进行分类。
13.可选地,获取预定类型的测量行驶工况数据的行驶工况区段的步骤包括:计算所述预定类型中的每个类型的测量行驶工况数据的转移概率矩阵;通过各个转移概率矩阵,获得对应于相应类型的测量行驶工况数据的行驶工况区段,其中,将获取的各个行驶工况区段按照预定排序拟合为行驶工况。
14.可选地,通过有监督学习方式对提取的特征向量进行分类,来对各个子区段的测量行驶工况数据进行分类的步骤包括:使用预定分类器对提取的特征向量进行分类,其中,所述预定分类器为使用从标准行驶工况数据提取的特征向量以及相应的类型标签作为训练集而训练的分类器;将特征向量被分类的类型,作为相应的子区段的测量行驶工况数据被分类的类型。
15.可选地,通过无监督学习方式对提取的特征向量进行分类,来对相应的各个子区段的测量行驶工况数据进行分类的步骤包括:使用无监督分类器对提取的特征向量进行分类;将特征向量被分类的类型,作为相应的子区段的测量行驶工况数据被分类的类型。
16.可选地,测量行驶工况数据包括在不同行驶环境下测量的行驶工况数据,其中,所述行驶环境对应于行驶区域、驾驶模式和/或天气条件。
17.根据本发明的另一方面,提供一种用于生成行驶工况的装置,所述装置包括:数据获取单元,其被配置为能够获取测量的测量行驶工况数据;分类单元,其被配置为能够对测量行驶工况数据进行分类;区段获取单元,其被配置为能够获取预定类型的测量行驶工况数据的行驶工况区段;行驶工况生成单元,其被配置为能够基于获取的各个行驶工况区段生成行驶工况。
18.根据本发明的另一方面,提供一种存储有计算机程序的计算机可读记录介质,其中,所述计算机程序被配置为当被处理器执行时实施根据本发明的用于生成行驶工况的方法。
19.根据本发明的另一方面,提供一种用于生成行驶工况的系统,所述系统包括:处理器;存储器,存储有计算机程序,当所述计算机程序被处理器执行时,实施根据本发明的用于生成行驶工况的方法。
20.根据本发明的用于生成行驶工况的方法和装置,能够根据车辆的不同设计需求,而使用测量行驶工况数据中不同类型的测量行驶工况数据,来生成满足不同车辆设计需求的行驶工况。
附图说明
21.通过以下结合附图所作的详细描述,将更全面地理解本发明的前述和其他方面,附图包括:
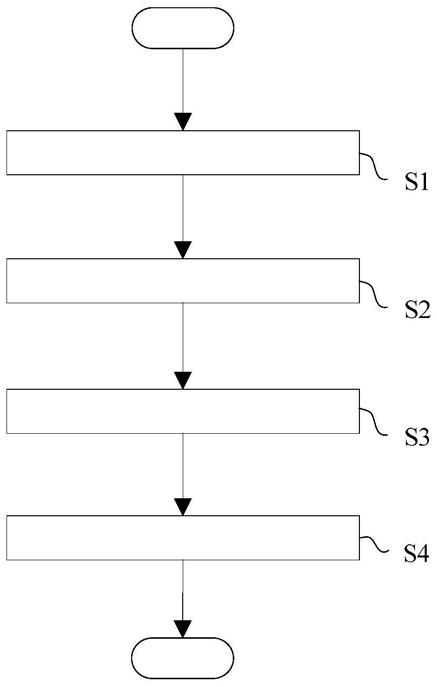
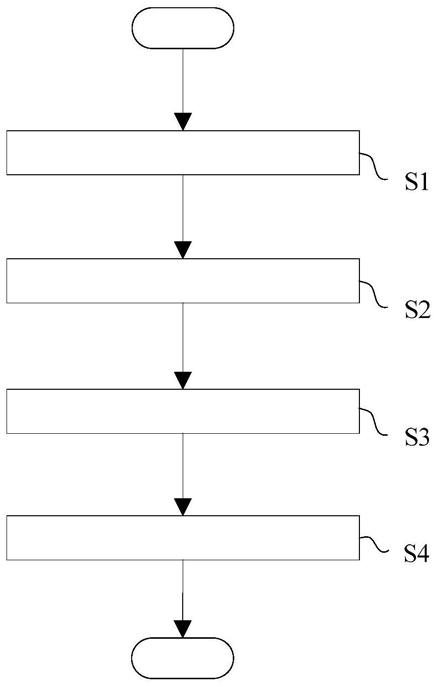
22.图1示出了根据本发明的一个示例性实施例的用于生成行驶工况的方法的流程图。
23.图2示出了根据本发明的一个示例性实施例的用于生成行驶工况的方法中对测量
行驶工况数据进行分类的步骤的流程图。
24.图3示出了根据本发明的一个示例性实施例的划分区段的示例。
25.图4示出了根据本发明的一个示例性实施例的划分子区段的示例。
26.图5示出了根据本发明的一个示例性实施例的用于生成行驶工况的装置的框图。
具体实施方式
27.下面,将参看附图更为详细地描述本发明的一些示例性实施例,以便更好地理解本发明的基本思想和优点。
28.图1示出了根据本发明的一个示例性实施例的生成行驶工况的方法的流程图。
29.参照图1,在步骤s1中,获取测量的测量行驶工况数据。
30.作为示例,测量行驶工况数据可包括在不同行驶环境下测量的行驶工况数据,其中,所述行驶环境对应于行驶区域、驾驶模式和/或天气条件。例如,可通过现有车辆在各种行驶区域、以各种驾驶模式在各种天气条件下进行长时间驾驶(例如,驾驶多天),来获取不同行驶环境下的测量行驶工况数据。例如,行驶区域可包括城市区域、城郊区域、乡村区域、高速区域等,其中,城市区域还可对应于拥堵环境、通畅环境等。驾驶模式可包括低速巡航、中速巡航、高速巡航等。天气条件包括极端天气条件(例如,存在较大风、雨、雪、雾等的天气条件)、正常天气条件(晴朗或存在较小风、雨、雪、雾等的天气条件)等。
31.应该理解,上述行驶区域、驾驶模式和天气条件仅是示例,行驶区域、驾驶模式和天气条件可根据实际需要包括其他形式。
32.此外,根据本公开,测量行驶工况数据可包括速度、加速度和时间数据。速度可以对应于实时速度、平均速度、最高速度、最低速度等,加速度可对应于实时加(减)速度、平均加(减)速度、最高加(减)速度、最低加(减)速度等。
33.此外,在获得测量行驶工况数据之后,还可确定是否需要对测量行驶工况数据进行预处理,从而使用预处理后的测量行驶工况数据获得更精确的行驶工况。
34.例如,可确定测量行驶工况数据中是否存在数据缺失部分和错误数据部分,当确定存在时,可通过预测、插值、删除等方式来对测量行驶工况数据进行预处理。
35.在步骤s2,对测量行驶工况数据进行分类。
36.作为示例,可根据上述不同行驶环境对应的行驶区域、驾驶模式和天气条件中的任意一项或任意组合来确定测量行驶工况数据将被分类的类型。此外,可根据实际情况根据其他标准来确定测量行驶工况数据将被分类的类型。
37.在步骤s3,获取预定类型的测量行驶工况数据的行驶工况区段。
38.例如,由于测量行驶工况数据包括在各种不同行驶环境下测量的行驶工况数据,因此,测量行驶工况数据可被分类为较多种不同的类型。而在车辆的设计中,可能不需要使用所有类型的测量工况数据,因此,可首先根据车辆的设计需要对测量行驶工况数据进行整体分类,然后获得与车辆或相关部件的设计需要相关的一些类型的测量行驶工况数据,从而获得与这些相关类型(即,预定类型)中的每个类型对应的该类型行驶工况作为行驶工况区段。
39.例如,在所需设计的车辆为城市公交车时,可获取与城市区域、中低速巡航、所有天气条件相关的类型的测量行驶工况数据,从而获得这些类型的测量行驶工况数据的行驶
工况区段。应该理解,这仅是示例,具体分类方式和所需使用的相关类型(预定类型)可根据实际情况而不同。
40.在步骤s4,基于获取的各个行驶工况区段生成行驶工况。
41.作为示例,在获取对应于各个类型的行驶工况区段之后,可将获取的各个行驶工况区段按照预定排序拟合为最终的行驶工况。
42.通过上述方式,可根据车辆或相关部件的实际需要,来对在不同行驶环境下测量的行驶工况数据进行不同的分类,并根据分类后的测量行驶工况数据中所需的预定类型的测量行驶工况数据,来生成满足不同需求的行驶工况。
43.图2示出了根据本发明的一个示例性实施例的用于生成行驶工况的方法中对测量行驶工况数据进行分类的步骤s2的流程图。
44.参照图2,在步骤s21,将测量行驶工况数据划分为多个区段。
45.作为示例,可通过测量行驶工况数据中包括的速度相对于时间的连续性,将测量行驶工况数据划分为多个区段。例如,可提取测量行驶工况数据中的速度、时间数据,获得速度时间曲线,并根据速度相对于时间的连续性、例如根据怠速时间,来划分多个区段。例如,可获得连续怠速时间大于或等于怠速阈值的区段(例如,怠速区段)以及连续怠速时间小于怠速阈值的区段(例如,非怠速区段)。
46.在步骤s22,确定所述多个区段中的至少一个有效区段。
47.作为示例,可将所述多个区段中包括大于阈值数量的有效速度的区段确定为有效区段,其中,有效速度可指示大于预定速度的速度,其中,所述速度包括在测量行驶工况数据中。
48.例如,预定速度可以是零,或者可以是大于零的其他值。例如,可根据对速度数据进行采样的采样点的数量来确定有效速度的数量,或者可根据有效速度的持续时间来确定有效速度的数量。
49.这里,通过步骤s22,可筛除怠速区段以及非怠速区段中关于速度的数据较少的区段,从而将非怠速区段中包括较多关于速度的数据的区段确定为有效区段。
50.图3示出了根据本发明的一个示例性实施例的划分区段的示例。
51.参考图3,图3可以是从测量行驶工况数据获得的一部分速度时间曲线,例如,从0秒至50000秒的速度时间曲线。图3中的包括较多关于速度的数据的区段1、区段2、区段3为确定的有效区段。而区段1与区段2之间的怠速区段、区段2与区段3之间的怠速区段、以及区段2与区段3之间包括较少关于速度的数据的区段(图3中具有圆圈标记的区段)被筛除。
52.返回参照图2,在步骤s23,将每个有效区段划分为至少一个子区段。
53.作为示例,可通过如下方式将每个有效区段划分为至少一个子区段:将每个有效区段中的测量行驶工况数据进行快速傅里叶变换(fft),获得对应的频率域工况数据;根据预定阈值范围对频率域工况数据进行划分;将与频率域工况数据的划分结果对应的有效区段的各个部分确定为所述至少一个子区段。
54.例如,可首先将步骤s22中获得的有效区段的速度时间曲线进行快速傅里叶变换,获得频率域中的曲线,在此,可根据实际情况可选地对获得的频率域的曲线进行低通滤波(lpf)。然后,可根据频率域的曲线的幅值范围,来将频率域中的曲线划分为至少一段,最后,将与频率域曲线的各个段分别对应的有效区段的各个部分确定为所述至少一个子区
段。
55.图4示出了根据本发明的一个示例性实施例的划分子区段的示例。
56.参照图4,图4的下方示图示出了对应于一个有效区段的速度时间曲线,横坐标可指示时间,纵坐标可指示速度,应该理解,此区段可不同于图3中示出的任何一个区段。
57.可通过图4的下方示图中由双向箭头指示的划窗的方式,对该有效区段进行快速傅里叶变换。通过对每个划窗中的曲线进行快速傅里叶变换,可获得如图4上方的示图中所示的频率域的曲线。可选地,该曲线可被低通滤波。图4上方的示图中的横坐标可指示划窗号,纵坐标可指示幅值。
58.参照图4,上方示图中的频率域的曲线根据相关阈值范围被划分成了三个部分,图4下方的曲线根据频率域的曲线的划分结果也被相应地划分成了三部分,即,三个子区段。
59.应该理解,图4示出的划分的子区段仅为示例,可根据实际使用需要来将有效区段划分为不同数量的子区段。
60.返回参照图2,在步骤s24,提取每个子区段的测量行驶工况数据的特征向量。
61.这里,可通过任意方式从每个子区段的测量行驶工况数据中提取特征向量。例如,提取的特征向量可包括关于速度、加速度、时间等的数据。应该理解,特征向量所包括的数据不限于此,可根据实际需要以及测量行驶工况数据的不同而包括不同的数据。
62.在步骤s25,基于提取的特征向量对各个子区段的测量行驶工况数据进行分类。
63.作为示例,可通过有监督学习方式或无监督学习方式对提取的特征向量进行分类,来对各个子区段的测量行驶工况数据进行分类。
64.根据第一实施例,在通过有监督学习方式对提取的特征向量进行分类的情况下,可使用预定分类器对提取的特征向量进行分类,其中,所述预定分类器为使用从标准行驶工况数据提取的特征向量以及相应的类型标签作为训练集而训练的分类器;然后,可将特征向量被分类的类型,作为相应的子区段的测量行驶工况数据被分类的类型。
65.在这种情况下,作为一个示例,可通过从标准行驶工况中提取特征向量,并根据设计需求为特征向量匹配不同的类型标签,然后将该特征向量以及相应的类型标签作为训练集来训练分类器,从而使用训练的分类器对从测量行驶工况数据提取的特征向量进行分类。
66.作为另一示例,可通过首先根据设计需要,使用预定标准将标准行驶工况数据进行分类、即添加类型标签,然后提取每个类型的标准行驶工况数据的特征向量,从而将该特征向量以及相应的类型标签作为训练集来训练分类器,然后使用训练的分类器对从测量行驶工况数据提取的特征向量进行分类。
67.根据第二实施例,在通过无监督学习方式对提取的特征向量进行分类的情况下,可使用无监督分类器对提取的特征向量进行分类;然后可将特征向量被分类的类型,作为相应的子区段的测量行驶工况数据被分类的类型。例如,无监督分类器可包括k均值、支持向量机分类器等任意无监督分类器。
68.例如,在图3中与区段1、区段2、区段3对应的速度时间曲线中标记的数字1、2可指示各个子区段被分类的类型(即,类型1、类型2)。应该理解,图3示出的仅是示意性示例,根据实际需要,有效区段中的各个区段可被分类为更多种类型。
69.在通过步骤s25对各个子区段的测量行驶工况数据进行分类之后,作为示例,可通
过如下方式执行图1步骤s3中的获取预定类型的测量行驶工况数据的行驶工况区段的步骤:计算所述预定类型中的每个类型的测量行驶工况数据的转移概率矩阵;通过各个转移概率矩阵,获得对应于相应类型的测量行驶工况数据的行驶工况区段。然后,在图1的步骤s4中,可通过全局状态偏移过程来将获取的各个行驶工况区段按照预定排序拟合为最终的行驶工况。也就是说,在步骤s3和步骤s4中,可通过马尔科夫链方式获得最终的行驶工况。
70.根据本发明的用于生成行驶工况的方法,能够根据车辆的不同设计需求,而使用测量行驶工况数据中不同类型的测量行驶工况数据,来生成满足不同车辆设计需求的行驶工况。
71.图5示出了根据本发明的一个示例性实施例的用于生成行驶工况的装置的框图。
72.参照图5,根据本发明的一个示例性实施的用于生成行驶工况的装置包括:数据获取单元1、分类单元2、区段获取单元3和行驶工况生成单元4。
73.数据获取单元1被配置为能够获取测量的测量行驶工况数据。
74.分类单元2被配置为能够对测量行驶工况数据进行分类。
75.区段获取单元3被配置为能够获取预定类型的测量行驶工况数据的行驶工况区段。
76.行驶工况生成单元4被配置为能够基于获取的各个行驶工况区段生成行驶工况。
77.这里,已经参照以上图1至图4对测量行驶工况数据、测量行驶工况数据的分类、行驶工况区段的获取以及最终行驶工况的获取进行了详细描述,这里不再赘述。
78.根据本发明的用于生成行驶工况的装置,能够根据车辆的不同设计需求,而使用测量行驶工况数据中不同类型的测量行驶工况数据,来生成满足不同车辆设计需求的行驶工况。
79.根据本发明的示例性实施例还提供一种用于生成行驶工况的系统。所述用于生成行驶工况的系统包括处理器和存储器。存储器被配置为能够存储计算机程序。所述计算机程序能够被处理器执行,以实施根据本发明的用于生成行驶工况的方法。
80.根据本发明的示例性实施例还提供一种存储有计算机程序的计算机可读记录介质,其中,所述计算机程序配置为当被处理器执行时实施根据本发明的用于生成行驶工况的方法。该计算机可读记录介质是可存储由计算机系统读出的数据的任意数据存储装置。计算机可读记录介质的示例包括:只读存储器、随机存取存储器、只读光盘、磁带、软盘、光数据存储装置和载波(诸如经有线或无线传输路径通过互联网的数据传输)。计算机可读记录介质也可分布于连接网络的计算机系统,从而计算机可读代码以分布式存储和执行。此外,完成本发明的功能程序、代码和代码段可容易地被与本发明相关的领域的普通程序员在本发明的范围之内解释。
81.此外,根据本发明的示例性实施例的上述装置和设备中的各个单元可被实现为硬件组件或软件模块。此外,本领域技术人员可根据限定的各个单元所执行的处理,通过例如使用现场可编程门阵列(fpga)、专用集成电路(asic)或处理器来实现各个单元。
82.尽管这里参考特定实施例说明和描述了本发明,但是本发明并不限于所示的细节。而是,可以在本发明的范围内对这些细节进行各种修改。
83.附图标记列表
84.s1 获取测量的测量行驶工况数据
85.s2 对测量行驶工况数据进行分类
86.s3 获取预定类型的测量行驶工况数据的行驶工况区段
87.s4 基于获取的各个行驶工况区段生成行驶工况
88.s21 将测量行驶工况数据划分为多个区段
89.s22 确定所述多个区段中的至少一个有效区段
90.s23 将每个有效区段划分为至少一个子区段
91.s24 提取每个子区段的测量行驶工况数据的特征向量
92.s25 基于提取的特征向量对各个子区段的测量行驶工况数据进行分类
93.1 数据获取单元
94.2 分类单元
95.3 区段获取单元
96.4 行驶工况生成单元
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。