1.本发明提供一种基于基因梯度粒子群算法的反馈相位调控方法,涉及基于相位调控的散 射成像技术领域。
背景技术:
2.当光透过生物组织、云雾和烟尘等折射率非均匀的散射介质时,入射光受到介质中随机 微粒的干扰而发生严重的波前畸变,进而在接收面上形成随机散斑,导致难以实现对目标的 成像或观测。因此,散射效应成为制约光透过散射介质成像技术发展的瓶颈和关键问题。随 着空间光调制器(slm)、数字微镜器件(dmd)、微机电系统调制器(mems)等波前调控 器件的发展,光学相位共轭、基于反馈优化的相位调控、光学传输矩阵等新型的光学成像技 术相继被提出,极大地促进了散射成像技术的发展和应用。
3.为描述散射介质在光传播过程中的作用,提出利用可表征输出光场与输入光场线性关系 的光学传输矩阵,将入射光场与出射光场联系起来。在未能获得完善传输矩阵的条件下,为 实现激光束透过散射介质聚焦或者成像,通常采用光学相位共轭技术或者基于反馈控制调节 的相位调控技术。其中,基于反馈控制调节的相位调控技术具有光路简单、操作灵活、易于 实现等优势,近年来得到飞速发展。由vellekoop和mosk率先提出的基于空间光调制器(spatiallight modulator,slm)的反馈相位调控技术,通过将散射介质对光场的调制过程看作“黑箱”, 以目标处光强作为优化条件,结合反馈控制算法获得散射介质的最佳调控相位,进而通过相 位补偿的方式减弱散射介质干扰,实现激光束经过散射介质后产生目标光强。
4.在实际激光束经散射介质后产生目标光强的过程中存在不可避免的噪声,如光传输噪声、 探测器噪声、杂散光噪声以及由大气扰动产生的噪声等。当系统受到噪声影响时,传输矩阵 发生不同程度变化,导致最佳调控相位随之改变。目前,已采用的反馈控制算法,虽然在暗 室环境下可以实现激光束经过散射介质后产生目标光强,但在受到强噪声干扰时大多面临优 化效果不理想和收敛慢等问题。因此,亟需发展一种适用于强噪声环境下基于反馈优化的波 前调控方法,在噪声影响下仍能快速寻找出最佳相位,实现激光束经过散射介质后产生目标 光强。
技术实现要素:
5.本发明提供了一种基于基因梯度粒子群算法的反馈相位调控方法,在强噪声环境下,运 用所提出的反馈相位调控方法能快速寻找最佳相位,使激光束经散射介质后产生目标光强。
6.所述基于基因梯度粒子群算法的反馈相位调控方法中,实现激光束经散射介质后产生目 标光强的步骤,包括:目标处光强作为优化条件,将相位调制器整个区域的相位值作为粒子 的位置坐标,利用第k
‑
1代种群与第k代种群的全局最优值产生梯度信息,并结合粒子群算 法速度和位置更新,以实现高效搜索的高效性;同时,通过对部分粒子位置进行
变异与交叉 来保持群体的多样性,以防止搜索陷入局部最优而停滞;特别是,当存在强噪声干扰时,该 反馈算法不过分依赖于以往优化信息,而是通过结合梯度快速搜索和基因交叉突变功能,实 现强噪声环境下寻找最优调控相位;最后,将获得的最优调控相位加载至相位调制器,通过 对激光束进行相位调控使激光束经散射介质后产生目标光强。
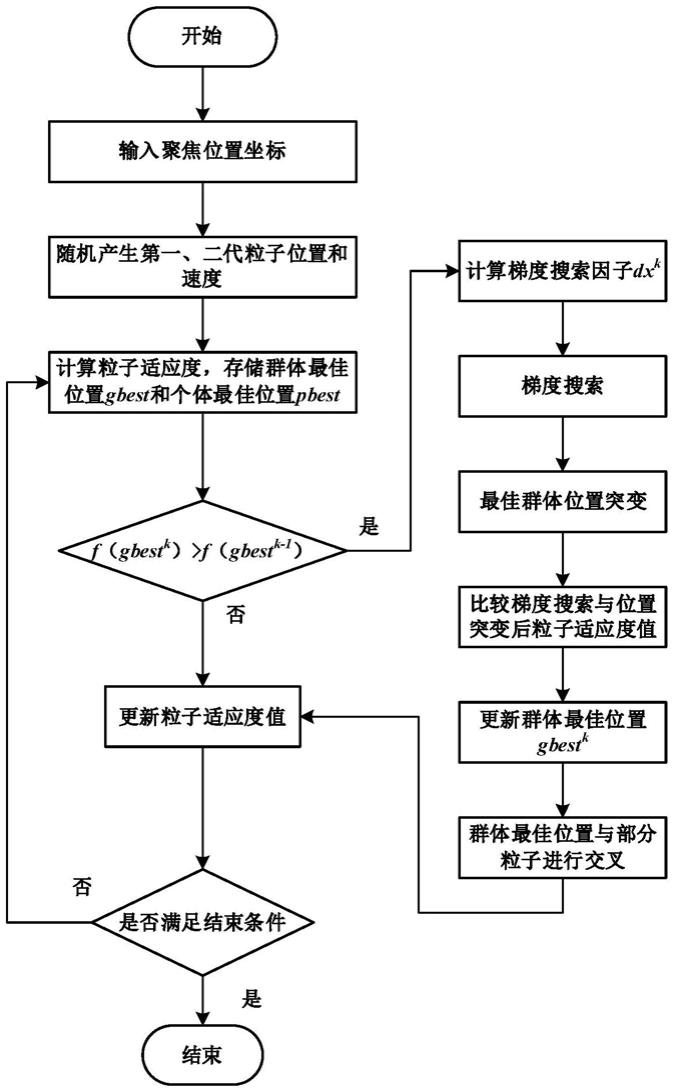
7.所述基于基因梯度粒子群算法的反馈相位调控方法中,寻找最优调控相位的步骤包括:
8.步骤a1:将空间光调制器整个区域的相位值作为粒子的位置坐标,初始化基因梯度粒子 群参数,随机产生第k代和第k
‑
1代种群的位置与速度,分别记录个体最佳位置pbest和群体 最佳位置gbest
k
、gbest
k
‑1,其中,k>1是迭代数;
9.步骤a2:比较相邻两代群体最佳位置的适应度值,判定f(gbest
k
)是否大于f(gbest
k
‑1), 若否,则进入步骤a3;若是,则进行梯度搜索和群体最佳位置突变与交叉;如果改变后位置 的适应度值优于f(gbest
k
),表示位置改变有效,在将新位置更新为群体最佳位置,重复执行 步骤a2,直至改变后适应度值不再提升而进入步骤a3;
10.步骤a3:进行位置与速度更新,生成第k 1代种群;
11.步骤a4:判断是否满足终止迭代条件,如果否,返回步骤a2进行迭代更新;如果是, 则终止迭代。
12.进一步地,所述步骤a2中梯度搜索和群体最佳位置突变的步骤包括:
13.1)基于所述第k代群体最优位置gbest
k
和第k
‑
1代群体最优的位置gbest
k
‑1,确定搜索梯 度dx
k
=β(gbest
k
‑
gbest
k
‑1),其中,β为调制因子,可表示为:
[0014][0015]
式中,k为迭代次数,m为最大迭代次数,β
max
、β
min
分别表示调整因子的最大值和最小值。
[0016]
2)分别计算沿所述搜索梯度搜索到的位置与基因突变后位置的适应度值f(gbest
k
dx
k
)、 f(gbest
k
‑
dx
k
)与f(mutation(gbest
k
)),其中,gbest
k
dx
k
、gbest
k
‑
dx
k
、mutation(gbest
k
)∈r, r为优化变量的可行解域空间;基因突变会受到变异率mr影响,mr值将控制最优位置的突 变比率;
[0017]
3)若f(gbest
k
dx
k
)、f(gbest
k
‑
dx
k
)与f(mutation(gbest
k
))大于f(gbest
k
),则确定搜 索成功,进而继续沿着该梯度方向搜索直至适应度不再提升,记录最后一次成功搜索到的位 置,将所述位置更新为第k代种群的群体最优位置gbest
k
,将群体最优位置与部分粒子进行交 叉产生部分k 1代粒子;交叉受到交叉率cr影响,cr值将控制群体最优位置与粒子进行交 叉的比率。
[0018]
进一步,所述步骤a3中进行位置和速度更新的步骤包括:
[0019]
基于第k代种群信息,产生第k 1代种群;第k 1代中第i个粒子的速度v
k 1i
和位置p
k 1i
可表示为:
[0020][0021]
[0022][0023]
式中,w为惯性权重,w
max
为惯性权重最大值,w
min
为惯性权重最小值;c1和c2为学习因子; r1和r2为0到1之间的随机数。
[0024]
所述基于基因梯度粒子群算法的反馈相位调控方法中,对激光束进行反馈相位调控的步 骤包括:
[0025]
步骤a1:使用相位调制器对激光束相位进行调制,同时探测器获得像面光强;
[0026]
步骤a2:计算像面光强中目标区域的光强大小,以目标区域达到最大光强为优化条件, 结合基因梯度粒子群反馈控制算法获得最优调控相位。
[0027]
步骤a3:将获得的最优调控相位加载至相位调制器,通过对激光束进行相位调控使其经 散射介质后产生目标光强。
[0028]
综上所述,本发明的有益效果是,提出了一种基于基因梯度粒子群算法的反馈相位调控 方法,将基因梯度粒子群作为相位调制算法基础,以目标光强为优化条件,将空间光调制器 整个区域的相位值作为粒子的位置坐标,利用第k
‑
1代种群与第k代种群的全局最优值产生 梯度信息,结合粒子群算法进行速度和位置更新。同时,通过对部分粒子位置进行变异与交 叉来保持群体的多样性。特别是,当存在强噪声干扰时,该反馈算法不过分依赖于以往优化 信息,而是通过结合梯度快速搜索和基因交叉突变功能,实现强噪声环境下激光束经过散射 介质后产生目标光强。综上,本发明提出的激光束经散射介质后产生目标光强的相位调控方 法,具有在强噪声干扰下,仍能快速寻找出最优相位的特性。
附图说明
[0029]
为了更清楚地对本发明实施例作进一步详细说明,下面将对实施例中使用的附图作简单 地介绍。有必要在此指出的是,所述附图仅仅是本发明的一些实施例,而并不意味着是对本 发明保护范围的任何限定。
[0030]
图1是根据本发明的实施例1中基因梯度粒子群算法流程。
[0031]
图2是根据本发明的实施例1中反馈相位调控装置光路示意图。
[0032]
图3是根据本发明的实施例1中仿真流程示意图。
[0033]
图4是根据本发明的实施例1中激光束经散射介质后产生聚焦光斑过程,在各种噪声水 平下粒子群和基因梯度粒子群的增强因子变化曲线。
[0034]
图中标记:1为激光器;2为平面反射镜;3为扩束镜;4为分束镜;5为空间光调制器; 6为凸透镜;7为散射样品;8为显微物镜;9为光强探测器。
具体实施方式
[0035]
下面结合本实施例中的附图,对本发明实施例中设计方案进行清楚、完整地描述;所描 述的实施例仅仅是本发明中的一部分实施例,而不是意味着是对本发明保护范围的任何限定。
[0036]
实施示例1
[0037]
一种激光束经散射介质后产生聚焦光斑的方法为基于基因梯度粒子群算法(geneticgradient particle swarm optimization,ggpso)的反馈相位调控方法。
[0038]
更具体的,本实施例中采用本发明的方法利用空间光调制器对激光束进行相位调制,使 激光束经散射介质后产生目标光强,其产生的目标光强为聚焦光斑。
[0039]
反馈相位调控装置光路如附图2所示,激光经过平面镜反射,再由扩束镜与分光镜进行 准直与放大后,照射在空间光调制器上。空间光调制器调制后的激光束经过分光镜反射后, 由透镜聚焦到散射介质表面,并使用物镜将散射光成像到光强探测器上。
[0040]
本发明实施例通过数值仿真来模拟入射光经过散射介质后聚焦的过程。其中,对激光束 传输过程的仿真使用了衍射理论与角谱分析法,散射介质的传输矩阵t服从圆对称复高斯分 布并进行奇异值分解。同时,为了分析噪声对优化过程的影响,在探测器上接收的强度图像 上分别添加不同强度的高斯白噪声用于模拟不同水平噪声,噪声强度使用信噪比snr表示, 计算流程如图3所示。采用增强因子对目标区域聚焦效果进行表征,其定义为优化后焦点区 域光强与接收面平均光强之间的比率。
[0041]
图4(a
‑
d)为分别添加snr=∞、10db、4db和1db强度的高斯白噪声时,增强因子随迭 代次数的变化曲线。模拟采用的参数为:slm大小为7.68mm,控制单元数为n=32
×
32,像 面中目标区域尺寸为92μm
×
92μmm。slm至透镜距离100mm,透镜至散射介质距离180mm, 散射介质至像面距离70mm,透镜焦距250mm。对于粒子群算法(pso)与基因梯度粒子群 算法(ggpso)均执行1000次迭代,两种粒子群算法初始种群大小均为20,学习因子c1、 c2为4,惯性权重最大值为0.9,惯性权重最小值为0.4;基因梯度粒子群算法中调制因子最 大值β
max
=0.4,调制因子最小值β
min
=0.1,突变率mr=0.4,交叉率cr=0.4。
[0042]
从图4中可以看出,随着迭代次数增加,粒子群算法的增强因子提升速度逐渐降低,在 不同的噪声水平下,分别进行了大约500、600、600和800次测量后达到平稳状态,表明噪 声水平越高,收敛速度越慢。与粒子群算法相比,基因梯度粒子群在各种不同的噪声强度下 均具有较快的提升。分析其原因在于:基因梯度粒子群前期在梯度信息指引下使增强因子快 速提升,后期在部分粒子交叉和突变下充分探索解空间,寻找全局最优。这表明即使在强噪 声下该算法仍能快速充分地获得优化相位,并有效减弱噪声对聚焦效果的影响。
[0043]
综上所述,本发明提出了一种强噪声下激光束经散射介质后聚焦的相位调控方法。在不 同信噪比水平下(snr=∞、10db、4db和1db),在透过散射介质聚焦的能力上,基因梯度粒 子群均明显优于粒子群算法。
[0044]
以上所述是本发明应用的技术原理和具体实例,依据本发明的构想所做的同等或等价设 计、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。