1.本发明大体上涉及使用交叉排列陆地采集方式来偏移地震数据,特别是使用共扩散波束偏移来启迪和解释地下碳酸氢盐目标以进行地震后处理。
背景技术:
2.1.引言
3.勘探地震学旨在从地表采集的叠前地震数据中揭示地下的目标碳酸氢盐的准确位置和幅度。它利用人工产生的弹性波来定位矿床(包括碳氢化合物、矿石、水、地热储层等)和考古遗址,应用物理学和地质学概念来获取地质信息以进行后处理,并且获得有关岩石类型的结构和分布的信息。通常,地震勘探项目是在考虑商业目标的情况下完成的,因此,成本效益是一个永远存在的问题。然而,仅在勘探过程中使用的地震方法并不能用于确定许多能使项目有利可图的特征,即使辅以其他数据,处理这些信息的独有方法也是显而易见的。地震勘探通常在得到明确的答案和所有可能学到的知识都已知晓之前很久就停止,这是因为根据本领域的普通技术人员的判断,可以通过其他方式,例如钻井来更好地获得进一步的信息。因此,地震方法与其他方法处于持续的经济竞争中。尽管如此,几乎所有的石油公司都依赖地震解释来选择勘探油井的地点。尽管所使用的任何勘探方法都是间接性的,但如果将某些已知技术与项目特定技术结合使用,那么成功勘探项目的可能性会显著提高,特别是考虑到3d技术和计算处理能力产生的大量信息。这是因为大多数接收系统(如地震检波器或水听器)显示二维或三维的地震“时间剖面”,其均由大量地震道组成。虽然这些地震时间剖面的目视检查可以直观地暗示地下反射岩层的形状和位置,然而陆地采集输入数据可能不准确,或者即使对于本领域的普通技术人员也会产生误导,因此导致对地下物质的实际形状和位置得出错误的结论。因此,通常对所记录的地震数据进行操作,以产生用于描绘地下物质的适当空间位置的偏移剖面。
4.2.记录地震和陆地采集输入数据
5.地球物理学家和勘探队使用受控量的炸药或可控震源卡车进行陆上勘探,而气枪则用于近海勘探,以将声波释放到地层中。由这两种方法中的任一种产生的声波在地下振动并反弹回地表,在那里被以特定模式放置在整个地形上的接收设备所接收。它们的数量和放置模式取决于勘查的设计、成本和规模。
6.当声波振动到接收系统中时,它们被记录或保存到内存资源中,然后显示为地下岩层的声音模式或“道”。这些波发生器及其记录设备的模式产生了许多复杂的科学数据,这些数据往往显示为:
7.·
二维数据,其使用单条数据线并表示两个轴的交点,一个水平轴和一个垂直轴;
8.·
三维勘探,其增加了水平轴,创建深度感知,并为可能更准确的地球物理勘探提供额外的数据点。
9.·
四维技术,其由同一位置相对于时间的3d读数制成,但显示地下碳氢化合物随时间的运动。
10.·
四分量技术,其测量水平和垂直的声波。
11.无论所获取的数据如何显示,它仍将被视为“原始的”或“未处理的”,并且在使用之前必须经过一系列的计算机化处理。这些过程(包括过滤、叠加、偏移和其他计算机分析)使得数据可用,但需要强大的计算机通过复杂的计算机程序来处理复杂的算法。随着计算机变得越来越强大,处理技术越来越高端,重新处理早些年获得的地震数据已经变得很普遍,这为最初无法从中获得的勘探了创造了新的机会。
12.在大多数情况下,交叉排列陆地采集方式在炮点线方向上有密集的炮点,在接收器线方向上有密集的接收器,尤其是当震源线和接收器线正交时。因此,对于这些勘探数据点来说,共炮点或共偏移处理(包括偏移)不是最佳的,并且最终需要比共排列(在本领域中也称为超级炮点或超级偏移)数量还更多的炮点或偏移。对于固定偏移参数,固定勘探的波束偏移效率与波束中心的数量成反比,或者与每个波束中心内的道的数量成正比。
13.3.数据处理
14.处理勘探区域内的所采集的地震输入和陆地采集数据通常由地球物理学家使用专用计算机完成,该计算机通常包括混合gpu/cpu处理器。因此,这些技术的处理成本很高,但它们在技术上往往是稳健的,因为它们提供了极好的结果。然而,地球物理学家、数据和处理器的密切关联对于结果的有用性是绝对必要的。只是测井、已知深度、辅助方法的结果、自定义公式、算法以及预期结果都应该提供给计算机系统,以通过计算机执行的软件程序来处理数据。这将来自采集步骤的原始记录数据(叠前数据)缩减为用于解释以定位地下油气藏的数据量(叠后数据)。数据处理涉及许多步骤,可以分为不同的类别:
15.1)对获取的数据进行分类。例如,此步骤将每个道迹分配给其共同的表面和地下位置,以及炮点到接收器的距离和方位角;
16.2)时间调整。该步骤用于补偿由于地表地形变化和近地表地质变化以及震源到接收器的距离变化所引起的传播时差。这些过程通常被称为“静态”和“nmo或动校正”。
17.3)小波压缩。此步骤将反射事件折叠为持续时间非常短的事件,而不是原始记录的签名。这通常被称为“反卷积”,它具有多种不同的技术实现方式。
18.4)噪声衰减和信噪比改进。此步骤尽可能多地去除噪声,同时尽可能多地保留和增强主信号。
19.5)添加(或叠加)具有共同地下反射点的道迹。
20.6)叠前和/或叠后成像。此步骤重新定位所有记录的样本并构建图像,其中,图像的事件显示在其时间(或深度)和空间上的适当位置处。成像或偏移是处理过程中最复杂和计算最密集的步骤之一。
21.7)其他步骤,用于从所记录的地震数据中提取更多的地质信息,以向解释步骤添加更多的信息。
22.a.数据正则化
23.地震勘探中的任何所获取数据的问题是其不规则性,因而影响其准确性和相关性。通常影响地震勘探准确性的一个问题是覆盖层非均质性。这个问题是指在一个模型中一个地质区域被覆盖,在地下有一个感兴趣的目标结构(例如,碳氢化合物储层)。因此,感兴趣的覆盖层结构将表现出在空间和/或时间意义上不会平滑变化的特性(例如,速度和密度)。相反,覆盖层的特性可能会迅速变化,例如由于覆盖层中存在岩石裂缝或较硬和较软
的区域。这往往导致勘探地震数据通常面临沿空间方向不规则采样、空间混叠以及低分辨率波动方程偏移的问题。
24.已经开发了几种有效的方法来对不规则的地震数据进行正则化和插值,例如基于波动方程的插值(ronen j.,1987,wave
‑
equation trace interpolation,geophys.,vol.52,p973
‑
984)、预测误差滤波插值(spitz s.,1991,seismic trace interpolation in the f
‑
x domain,geophys.,vol.56,p785
‑
794)、傅立叶重建(sacchi m d,ulrych t j.,1996,estimation of the discrete fourier transform,a linear inversion approach,geophys.,vol.61,p1128
‑
1136)、seislet变换插值(fomel s,liu y.,2010,seislet transform and seislet frame,geophys.,vol.75,pv25
‑
v38)、拉东变换(rt)正则化(zhang y,lu w.,2014,2d and 3d prestack seismic data regularization using an accelerated sparse time
‑
invariant radon transform,geophys.,vol.79,pv165
‑
v177),以及用于综合插值框架的非线性成形正则化(chen y,zhang l,mo l.,2015,seismic data interpolation using nonlinear shaping regularization,j.seism.explor.,vol.24)。在这些方法中,基于rt的正则化和插值已被证明是有效和稳健的,特别是对于叠前地震数据。基于rt的地震数据正则化过程简单而灵活。将不规则空间采样数据变换到拉东面板,再变换回规则空间网格,以重构规则地震数据。然而,无论使用何种正则化方法,不规则的数据会根据所使用的模型而有不同的表现:
25.‑
使用基尔霍夫叠前偏移时,数据的不规则性通常会转化为图像伪影。
26.‑
执行多重消除时,初级反射会被多重污染。
27.‑
共方位角偏移可能会变得无用,因为使用这种方法意味着输入数据在中点和偏移坐标中有规律地间隔,因此严重依赖于数据正则化的预处理。
28.‑
4d地震监测要比较来自不同产生阶段所收集的数据的3d图像,以监测储层的变化。它通常需要将数据正则化到统一网格上,以共同定位具有不同采集方式的数据集。
29.b.高斯波束偏移
30.十多年来,基尔霍夫偏移一直是叠前地震成像的主要内容。它允许将时间和深度偏移方法合并到一个基本程序中,促进面向目标的偏移,并实现直接的偏移速度分析。虽然单波到达基尔霍夫叠前深度偏移的成像精度足以解决最具挑战性的结构成像问题,然而与许多波场外推方法的精度相比往往会暴露其缺点。特别是在需要多波到达才能给出良好图像的复杂地质中,我们必须选择一个特定的波峰,这会降低图像质量。
31.算法的最新发展及其在计算机实现系统中的实现使得可以对事件进行成像的波场外推方法成为基尔霍夫技术的可行替代方案。然而,这些方法在对陡峭或翻转的事件进行成像以及考虑各向异性的方面可能存在问题。此外,虽然波场外推方法可以负担得起,但它们仍然比基尔霍夫偏移昂贵得多。因此,它们通常保留用于真正需要多波到达成像的情况,例如复杂盐体下方的地质。所述方法之一是高斯波束偏移,它已广泛应用于偏移成像(参见hill,n.r.,1990,gaussian beam migration;geophysics,v.55,1416
‑
1428以及hill,n.r.,2001,prestack gaussian
‑
beam depth migration,geophysics,v.66,1240
‑
1250)。
32.高斯波束偏移方法在陡倾成像领域以及焦散和多值传播时间方面优于基尔霍夫偏移方法。该方法随后被科研人员利用,最终将高斯波束偏移的研究扩展到各向异性高斯
波束偏移、真振幅高斯波束偏移、高斯波束逆时偏移、动态聚焦高斯波束偏移,以及稀疏高斯波束偏移。无论使用何种方法,真正的高斯波束偏移基本上包括四个步骤:分解地震数据;用高斯波束表示地震数据;向下传播高斯波束;根据成像条件叠加高斯波束在成像点的贡献。对地震数据进行分解并用高斯波束表示地震数据是高斯波束偏移的关键因素,它决定偏移的计算量和成像结果。
33.在现有的稀疏高斯波束偏移成像方法中,利用曲率为零的高斯波束对地震数据进行稀疏分解。但是地震数据是有曲率的,因此基于高斯波束的函数的宽度和相邻的两个高斯波束的中心间距都应该足够小,以便能够对地震数据进行适当的拟合。然而,在现有的高斯波束偏移成像方法中,通过分解得到大量的波形函数,在地震成像偏移的过程中需要对每个波形函数进行偏移成像,因此整个偏移的计算效率很低。
34.综上所述,高斯波束偏移成像方法保留了基尔霍夫偏移的优点,但也可以成像多波到达。尽管hill,n.r.(如前所述)在他的两篇经典论文中给出了高斯波束偏移的理论基础,但该方法涉及众多步骤,并且实施难度大。事实上,这也许是它没有变得更受欢迎的主要原因。高斯波束偏移解决了单波到达基尔霍夫偏移的许多成像精度问题,同时保留了基尔霍夫方法的许多优点,包括它能够对急剧倾斜或翻转的事件进行成像,以及在存在tti各向异性的情况下成像。
35.然而,在本领域中已经使用了其他波束偏移方法。特别是,在地震生产中广为人知并广泛使用了共偏波束偏移(rose hill,1996,2001)和共炮波束偏移(samuel gray,2005)。尽管这两种方法提供了明显的优势,但很少或根本没有提到交叉排列采集中的共排列波束处理在地震处理中的应用。理论上,共排列波束偏移显著提高了平台深度处理的信噪比和周转效率。随着陆地采集中交叉排列勘探的激增,对共排列波束偏移速度模型构建和成像的需求也在增加。
36.c.射线追踪
37.射线追踪的概念非常有用。它基本上归结为在空间中绘制一条与辐射能的流动方向相对应的线。射线是几何理想化的,因为它们没有宽度。因此,射线是一数学装置而非物理实体。在实践中,本领域的普通技术人员可以产生非常窄的波束(例如激光束),因此射线可能是这种波束的窄度所无法达到的极限。与几何线条类似,射线是一种方便的虚构。它们作为一束光存在于现实世界中;波束有宽度。同样,我们可以将地震射线视为地震能量的流动方向上的理想化波束。
38.在地球物理学中运行射线方程的过程与在光学中的相似。它基本上包括求解描述了以p波速度α传播的压缩波、以s波速度β传播的横波以及具有恒定振幅和零初始相位的频率ω的谐波的波动方程。然后可以将p波的公式写为:
[0039][0040]
射线的概念描述了波包通过各向同性介质的路径,在增加相位的方向上始终垂直于波前。与定义为波前从参考点x0传播到任意点x所花费时间的传播时间t(x)一样,光程函数相对于参考点处的相位来定义s(x)=α0t(x),并且光程函数方程可以根据传播时间和波速v(x)重写为:
[0041][0042]
然后,可以通过函数x(s)来描述射线路径,其中s是沿着射线路径距参考点的曲线距离。此外,慢度向量p可以定义为因为它在点x(s)处的大小等于该点处的速度的倒数。应用射线路径与波前正交的条件,得到:
[0043][0044]
通过对光程函数方程(2)相对于s进行微分方程,并将结果与方程(3)相结合,得到以下射线方程(4),然后可以计算传播时间。
[0045][0046]
也存在其他射线追踪建模程序,本领域的技术人员使用它们来获得2d或3d模型而无需反演阶段。其中一种程序称为rayamp(参见spence,g.d.,1983.rayamp:an algorithm for tracing rays and calculating amplitudes in laterally varying media:program documentation;univ.of british columbia),但要求用户定义2d模型中的速度结构,其具有两种类型的边界:模型边界和分隔边界。模型边界是任意倾角的直线。它指定了沿其长度的恒定速度和垂直于其长度的非零速度梯度。分隔边界被分配零速度,它将两个具有不同速度和速度梯度的区域分开。因此可以定义这样的块,其中速度以及速度梯度的幅度和方向是任意的。程序将给定块内的射线路径视为圆弧(因为速度梯度恒定),由此可以使用非常简单的解析表达式来计算其传播时间和传播距离。
[0047]
本领域技术人员使用的另一种射线追踪程序称为jive3d(参见james w.d.hobro;"jive3d";https://bullard.esc.cam.ac.uk;2006)。jive3d建模分为正向建模和反演建模。在算法的每次迭代中,从工作速度模型中生成一组合成的传播时间数据,并且计算将模型参数的微小变化与传播时间数据的微小变化联系起来的弗雷歇导数。然后将这些合成数据和弗雷歇导数传递到反演阶段,其将合成数据与给定的真实数据进行比较,并基于一组线性近似来计算新模型,直到模型收敛到能够优化用于平滑度和最佳拟合的指定范数的点为止。
[0048]
因此,鉴于射线追踪的当前状态,没有一种解决方案可以使用。特别是,rayamp只能用于2d正向建模,这意味着它不能对起始模型进行反演。如果要用rayamp获得更逼真的模型,则本领域的普通技术人员必须包括某种算法来自动搜索定义模型的最佳参数集,例如:不同的模型边界、速度场和平滑标准。jive3d的程序更实用,因为它包括反演,因此能够构建最终模型作为起始模型的演变。
[0049]
d.概括
[0050]
当对盐体下方或沿陡峭侧翼的储层成像时,传统的基于单波到达射线的技术(例如基尔霍夫偏移)遇到严重问题,这是因为成像过程无法重建高度不规则(多皱)的盐团顶部的散射能量,并且来自穿过盐团顶部的波的信息实际上会丢失(或仅部分成像)。波束偏移(hill,1990,2001)自然地对多波到达成像,但如果将密集数据体分解为地震元素并保存以备将来迭代,则也大大降低了层析成像迭代的后续偏移的成本。激光束偏移方法将波束
排列限制在“激光薄”区域(xiao et al.,2014),并且可以适应大的横向速度变化以达到中心射线的精度,同时对图像没有倾角限制。
[0051]
因此,针对现有技术的一些缺陷,本发明的实施例引入了一种新的计算机实现的方法和系统,其采用压缩感测模型以用于在陆地交叉排列上偏移地震。
技术实现要素:
[0052]
本发明公开了一种通过共排列处理来定位地下反射体的新方法,其专为交叉排列方式而设计。该方法将具有比针对标准交叉排列陆地采集方式的共炮或共偏的数量更少的共排列数量;正如在本领域中已经观察到的那样,每个波束中心内的更多道导致更高的分解信噪比和更少的偏移周转时间。因此,本发明的一个建议实施例包括用于陆地交叉排列采集方式的共排列波束偏移,其在效率和质量方面优于共炮/共偏波束偏移。
[0053]
本发明的实施例的技术呈现了与本领域中所描述的与“向下延续”相关的压缩感测的新颖的地球物理学概念,也称为“外推”,这意味着不存在来自于投影的任何方向约束。其目标是简化在波束域中完成的耗时的地震处理。更具体地说,通过压缩感测,波束技术可以将密集的数据分解为稀疏的地震元素,并保存下来以供未来的地震处理。稀疏的波束元素由最重要的属性来描述,包括位置、倾角和小波,并且能够表示那些复杂/密集的叠前数据集,以用于后续的层析成像和偏移。
[0054]
因此,本发明的实施例的目的涉及确定用于陆地交叉排列采集方式的有效、准确的共排列波束偏移方法。特别是,本发明的目的是执行波束分解方法,同时将稀疏波束元素存储到存储器资源(例如磁盘)中,以减少用于后续地震偏移/叠加所需的计算时间。
[0055]
下文将参考下面列出的附图描述本发明的进一步细节、示例和方面。
附图说明
[0056]
通过结合附图并考虑以下描述,可以容易地理解本发明的教导。
[0057]
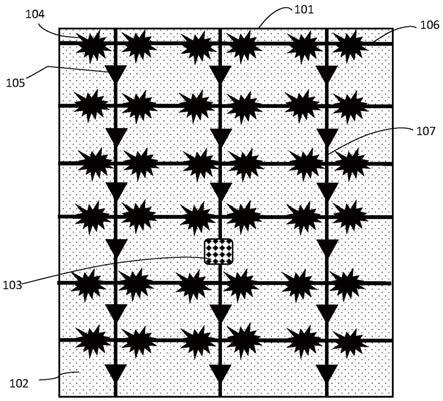
图1示意性示出了根据本发明的一个实施例的勘探区域的俯视图,显示了具有接收器线和炮点线的交叉排列采集方式;
[0058]
图2是示出了根据本发明的一个实施例的用于偏移陆地交叉排列的地震的计算机实现方法的流程图;
[0059]
图3是根据本发明的一个实施例的系统装置的框图形式的电气图,该系统装置被编程以执行用于偏移陆地交叉排列的地震的计算机实现方法;
[0060]
图4示出了由非暂时性程序计算机可读存储器存储设备所执行的子例程的流程图,其中将检索到的地震模型输入数据分解为用于不规则生成的共排列波束中心的稀疏共排列波束;和
[0061]
图5示出了由非暂时性程序计算机可读存储器存储设备所执行的子例程的流程图,其中将检索到的地震模型输入数据分解为用于规则生成的共排列波束中心的稀疏共排列波束。
具体实施方式
[0062]
现在将详细参考本发明的几个实施例,其示例在附图中示出。应注意的是,在适用
之处,在附图中使用相同或类似的附图标记来指示相同或类似的功能。附图仅出于说明的目的描绘了本发明的实施例。本领域的技术人员将从以下描述中容易地认识到,在不脱离本文描述的原理的情况下,可以采用其中示出的结构、系统和方法的替代实施例。
[0063]
由于陆地数据采集可能在不平坦的表面上进行,有时是温和的或山脚的地形,因此炮点线和接收器线不一定是笔直的,并且经常是弯曲的,以避开地面上的障碍物。因此,这些条件给共排列波束偏移之前的正则化阶段带来了困难。幸运的是,利用所提出的计算机实现的方法和系统,不再需要与平坦表面相关,而是与平滑的浮动地平线相关。只要在波束中心地形足够平坦或光滑,并且炮点线和接收器线足够直或正交,则地形和线风化的影响可在适当的预处理后小到可以被忽略。
[0064]
在陆地交叉排列采集方式的期间,通常在炮点线方向和接收器线方向上都有密集的炮点,其中震源线和接收器线是正交的。来自交叉排列采集的共排列x
c
定义为震源位于一条炮点线而接收器位于一条接收器线上的所有道。在转换为本地测量坐标后,在本计算机实现的方法中,可以将每条炮点线的炮点线坐标s
x
设为常数,将每条接收器线的接收器线坐标g
y
设为常量,将勘探记为xsg,以及将共排列函数标识为x
c
(s
x
,g
y
)。坐标s
y
和g
x
对于每条炮点线或接收器线来说也分别是常数;将震源慢度标识为而将接收器慢度标识为在超级共排列中,震源和接收器坐标在震源线或接收器线方向上的一定范围内,而不仅仅是一个常数。这对于有地形的陆地采集很有用,并且可以进一步提高效率和增加信噪比。共传播波束偏移被定义为这样的过程:首先在共排列域中对所采集的数据进行排序,然后在一个共排列输入道集上按照相应的倾斜叠加和成像标准来进行波束偏移。
[0065]
一旦获取的数据已被正则化,则开始恢复在正则化期间丢失的数据的过程。尽管有多种方法来实现这一点,但压缩感测(cs)是一种新颖的感测/采样范式,其允许从比奈奎斯特率少得多的测量中恢复稀疏(很少非零值)或可压缩(快速衰减条目)的信号。稀疏假设在实践中很容易实现,例如,自然图像在小波域(例如jpeg2000压缩)中是稀疏的,而地震图像在曲波方面可以很好地表示。参见candes,e.,romberg,j.,and tao,t.,2006,robust uncertainty principles:exact signal reconstruction from highly incomplete frequency information:information theory,ieee transactions,52,489
‑
509和donoho,d.,2006,compressed sensing:information theory,ieee transactions on,52,1289
‑
1306,其首先提供了周密的理论,强调在哪些条件下可以从子采样测量中恢复稀疏信号。
[0066]
根据本计算机实现的方法和系统所采用的压缩感测理论,成功的降维取决于非相干采样策略,其中相干混叠被转换为相对无害的高斯白噪声。将这种方法应用于勘探地震学中的现实生活问题面临三方面的挑战(参见herrmann,f.j.,and li,x.,2012,efficient least
‑
squares imaging with sparsity promotion and compressive sensing,geophysical prospecting,vol.60,p696
‑
712)。首先,地震数据采集受到震源的位置、类型和数量(可能同时存在)以及接收器数量的物理约束。这些约束与极大尺寸的地震数据相结合,需要针对地震情况的特定方法。其次,虽然cs为降维提供了重要机会,但在使科学计算工作流程适应这种新方法的方面仍然存在挑战,而且cs再次提供了使计算更高效的机会。第三,地震波场具有高度的多尺度和多方向性,并且是波动方程的解。这需要使用定向变换
和各向异性变换,例如曲波。
[0067]
然而,本发明的计算机实现的方法和系统使用用于波束技术的压缩感测算法来将密集数据分解为稀疏地震元素,并保存到内存资源中以用于未来的地震处理。所保存的稀疏波束元素由其最重要的属性来描述,包括位置、倾角和小波,并且能够表示那些复杂/密集的叠前数据集,用于后处理层析成像和偏移。通过简化波束域中的地震处理,可以将耗时的地震后处理(例如偏移、叠加)大大减少到可接受的周转时间。
[0068]
共偏波束偏移和共炮波束偏移是众所周知的,并广泛应用于地震生产中。即使具有明显的优势,在地震处理中也很少提及或没有提及共排列波束处理在交叉排列采集中的应用。因此,本发明的共排列波束偏移方法和系统通过以下方式来处理工作流程:(1)将所获取的交叉排列数据分类到共排列域输入道集中;(2)地形阅读;(3)调整到平坦的表面或地形上;(4)分解为稀疏波束;(5)射线追踪;(6)叠加。具体地,计算机实现的方法和系统使用在非暂时性程序计算机设备中编程的专用偏移内核进行堆叠,算法形式如下:
[0069][0070]
然而,本领域的普通技术人员很快就会意识到,如果非暂时性程序计算机可读设备想要对输入进行更多的扫描,则偏移内核算法可以如下替代形式执行:
[0071]
[0072]
图1示出了地震勘探区域101,其中可以使用本发明的优选实施例。重要的是应当注意,图1的勘探区域是基于陆地的区域102,包括线条状的炮点104和接收器位置105(如图1所示)的一个完整的勘探计划可能因目标、预算、资源和时间等勘探特征而变化。
[0073]
本领域的普通技术人员将认识到,地震勘探区域101产生局部地质的详细图像,以确定可能的碳氢化合物(石油和天然气)储层的位置和大小,从而确定潜在的井眼位置103。图1所示的陆地采集方式通常是通过线条状爆炸来进行的,其中接收器电缆以平行线(内线方向)布置,并且爆炸位于垂直方向(横线方向)。在这些勘探区域中,声波在爆炸期间从地下岩层在不同的入射点或爆炸点104处反弹,反射回地表的波由地震数据记录传感器105捕获,由数据传输系统305从所述传感器105处无线传输303,然后存储以供后续处理,并通过图3所示的数字高性能计算系统来进行分析。虽然炮点104在图1中表示为具有几乎水平延伸的炮点线106的交叉排列模式的几何图形,然而本领域的普通技术人员很快就会意识到所述模式可以很容易地以其他方式表示,例如垂直的、对角线的或这三者的组合。类似地,记录传感器105布置在显示为横穿过炮点线106的接收器线107上,但也可以表示为其它方式。线条状爆炸方法产生大范围的震源
‑
接收器方位角,这在系统计算机301的分析期间可能是一个问题。震源
‑
接收器方位角是参考线(例如接收器线或倾角线)与通过震源及接收器站的线之间的角度。然而,由于操作条件的原因,如图1所示的均匀覆盖通常无法在整个勘探区域内实现。
[0074]
参照图2,其显示了本发明的优选实施例的概览的流程图201。系统采集阶段202通过从勘探区域101中检索地震模型输入数据203以及陆地采集输入数据204来启动该过程。特别是,从勘探区域的一部分陆地采集数据中检索四种不同类型的输入:在时域中表示的放大测井数据、一组角度图像道集、层位信息,以及地震速度数据。本发明收集的另一组数据是地震速度305。所获得的地震速度(压缩速度和剪切速度)是所提出实施例的基本输入要求,因为它包括随外部条件(应力、温度)和内部(流体饱和度、裂纹密度)条件的变化而变化的材料特性。因此,监测这些外部或内部条件的变化是地球物理勘探(例如由本实施例执行的地球物理勘探)的一个目标,因为它有助于地震预测(通过应力变化监测)和储层开发(通过流体饱和度监测)。
[0075]
地震模型输入数据可直接从井眼位置获得,并远程传输到数据库304,以供进一步处理,例如图4中所设想的那样。它也可以由非暂时性程序计算机可读设备306从数据库304中检索。这样,地震模型输入数据可包括p波速度、s波速度、密度、一组角度图像道集,其与在不同的入射角处在时间域或深度域中表示的勘探区域101内的入射点104的数量一致。尽管如此,由于该地震勘探数据203和204的数据过于原始、噪声大或来自不同的入射点104,因此需要对其进行进一步处理。在计算机实现方法于步骤205处将两组获取的输入数据存储到内存资源之后进行这种进一步的处理。
[0076]
然后,非暂时性计算机程序设备306从内存资源304中接收信号,指示所采集的数据203和204已经被存储,并且启动一组并行操作,其包括将地震模型输入数据分解到备用的共排列波束中心的子例程207,以及正则化陆地采集输入数据的子例程208。此时,系统计算机301向非暂时性程序计算机可读设备306发送消息钩子,以加载来自子例程207的分解的地震模型输入数据,以及来自子例程208的正则化的陆地采集输入数据;启动生成共排列道集的例程209。这些生成的共排列道集然后在步骤212处存储到内存储资源304中。共排列
道集是指一组叠前道,其具有有限范围的排列位置或它们之间的排列位置坐标。这些道在分解后可能包含一些不规则性,需要由子例程以不同方式处理。非暂时性计算机程序设备306将向计算机系统设备发送消息,以指示操作它的本领域的普通技术人员来确定所分解的共排列波束中心是否包括规则的或不规则的道。术语“共排列道集”通常用于此类道集,即使道集内的排列位置或排列坐标不相同也是如此。如果一个共排列道集连续地覆盖了整个勘探(2d或3d)的大小,则可以认为它是“有效的”。使用“连续”一词的意思是相关数据以勘探的最佳空间速率进行采样。使用“有效”这个词的意思是这样的道集本身提供了连续的全范围的地下图像。这种将地震数据分组为共排列道集是速度分析、叠前成像和叠前数据解释的例程,例如avo分析。
[0077]
然后,系统计算机301向非暂时性程序计算机可读存储器设备306发送消息钩子,以启动滤波例程210,其使用本领域的公知算法,例如带通滤波或低通滤波来对波段和共排列道集的准确度/频率进行滤波。这然后会触发非暂时性程序计算机可读存储器设备306向计算机系统设备307发送消息,以在监视器309上显示滤波是否以本领域的普通技术人员可接受的方式执行。若用户或本领域的普通技术人员对滤波210不满意,则可通过使用键盘310、鼠标311输入拒绝指令,使计算机系统307与非暂时性程序计算机可读存储器设备306进行通讯,以便使用不同的预编程算法集来执行滤波210。该循环一直持续到用户或本领域的普通技术人员通过使用键盘310或鼠标311进行输入以使滤波210以可接受的方式执行为止。在确认滤波是可接受的之后,非暂时性程序计算机可读存储器设备306生成一组经滤波后的共排列道集211,其然后在步骤212处存储到内存资源304。
[0078]
然后,系统计算机301向非暂时性程序计算机可读存储器设备306发送消息钩子,以在步骤213处启动对经滤波后的共排列波束中心的检索。一旦检索到,非暂时性程序计算机可读存储器设备306便使用速度分布算法、中靶算法或弯曲算法来开始计算激光束射线追踪214,以追踪从入射点104到接收器位置105的射线路径。采用编程于非暂时性程序计算机可读存储器设备306中的射线追踪算法306来进行正向建模并应用地震传播时间反演,用以确定速度模型和界面结构。该算法针对各向同性和垂直横向各向同性(vti)介质中的每条射线来进行。该算法的主要优点(也见于zelt c.a.,smith r.b.,1992.seismic traveltime inversion for 2
‑
d crustal velocity structure;geophysics;j.int.,vol.108,p16
‑
34)是它在模型参数化和速度测定中的灵活性。为了获得速度模型和界面结构,编程算法应用地震折射/广角反射传播时间计算。非暂时性程序计算机可读存储器设备306在步骤215处生成激光束追踪的射线,然后在步骤216处将其存储到内存资源304中。一旦存储,内存资源便向非暂时性程序计算机可读存储器设备306发送消息钩子,以在步骤217检索于步骤212处存储到内存资源304中的共排列道集以及在步骤216处所存储的追踪的激光束射线。非暂时性程序计算机可读存储器设备306然后在步骤218处通过在偏移轴上应用线性动校并对幅度求和来计算共排列倾斜叠加。倾斜叠加步骤218的基本假设是水平分层的地球模型假设。常规处理主要在中点偏移坐标中完成。倾斜叠加用射线参数p轴来代替偏移轴,它是水平相速度的倒数,并且非暂时性程序计算机可读存储器设备306在步骤219处开始计算共排列偏移算法,以生成共排列波束偏移图像。在步骤219生成的图像然后在步骤220处被存储到内存资源304中,并且该图像由计算机系统307的监视器309显示。然后,用户可以打印在步骤219生成的偏移图像,或者与其他计算机实施的程序共享文件,用
于进一步处理或分析。
[0079]
图3示出了计算机系统装置301的功能框图,该计算机系统装置301用于执行用于在勘探区域中进行地下洞穴识别的计算机实现方法201的一系列操作。计算机系统装置301还包括(有线和/或无线的)内存资源304,其用于存储由接收传感器105使用无线传输系统305所传输的数据以及无线传输的数据303,非暂时性程序计算机可读存储器存储设备306,以及计算机系统设备307。
[0080]
计算机系统设备307充当非暂时性程序计算机可读存储器存储设备306的用户界面,以输入、设置、选择并执行检索、计算、生成、调用、确定、转换和纠正函数(消息钩子程序)的操作。所述计算机系统设备307(有线和/或无线地)连接到非暂时性程序计算机可读存储器存储设备306。计算机系统设备307还包括其他设备,例如中央处理单元(cpu)308,显示器或监视器309,键盘310,鼠标311和打印机312。
[0081]
系统计算机设备301具有提供用于多个连接的设备的连接和互操作性的固件和软件,例如用于存储数据的内存资源304、遥测系统305、非暂时性程序计算机可读存储器存储设备306和计算机系统设备307。系统计算机301包括操作系统、一组消息钩子程序的集合,以及系统应用程序。
[0082]
此外,因为性能始终是重要的问题,所以系统计算机设备301使用非暂时性程序计算机可读存储器存储设备306来确保波束偏移步骤不会受到系统计算机设备301的输入/输出或任何网络通信的瓶颈制约。事实上,软件框架分布式文件系统和适当的数据压缩以及根据数据的智能文件缓存将确保计算机实现方法仅受限于内存/缓存速度和cpu计算能力,而不受其他任何限制。
[0083]
嵌入在系统计算机301中的操作系统可以是microsoft公司的windows操作系统,ibm公司的os/2系统,unix系统,linux系统,sun microsystems或apple操作系统,以及无数种嵌入式应用程序操作系统,例如可从wind river公司获得。
[0084]
系统计算机301的消息钩子程序例如可以表示内存资源304、计算机系统设备307和非暂时性程序计算机可读存储器存储设备306的操作或命令,其可正在执行用于使用地震反射数据来进行小洞穴识别的计算机实现方法的某些步骤过程或子程序。
[0085]
所述一组消息钩子程序合可以首先由以下输入来启动:用户,例如输入用户定义的值或参数;计算机系统设备307的操作;在非暂时性程序计算机可读存储器存储设备306中的操作的处理;或者一旦某些数据已被内存资源304或非暂时性程序计算机可读存储器存储设备306所存储或检索到便自动执行。基于这些输入、过程或操作事件中的任何一个,内存资源304、非暂时性程序计算机可读存储器存储设备306或计算机系统设备307便生成数据包,该数据包被传送到系统计算机301,表示已发生的事件以及需要发生的事件。当系统计算机301接收到数据包时,它基于事件来将其转换为消息,并执行计算机实现方法的所需的步骤。该计算机实现方法包括一组消息钩子列表,其标识了一系列消息钩子程序。当操作系统收到消息后,将检查消息钩子列表,以确定是否有任何消息钩子程序已在操作系统中注册了自己。如果至少一个消息钩子程序已在操作系统中注册了自己,则操作系统会将消息传递给已注册的消息钩子程序,其会首先出现在列表中。被调用的消息钩子执行并向系统计算机301返回一个值,其指示系统计算机301将消息传递到下一个注册的消息钩子304、306或307。系统计算机301继续执行该操作,直到所有注册的消息钩子都通过为止,这
通过识别磁干扰313来表示该方法的完成。
[0086]
根据本发明的优选实施例,仅作为示例性实施例而详细描述了某些硬件和软件,它们并不限制所公开的实施例的实现结构。例如,尽管已经描述了图3中的接收系统设备的许多内部和外部部件,但是本领域的普通技术人员将会理解,这样的部件及其互连是众所周知的。另外,所公开的发明的某些方面可以体现在使用一个或多个接收系统、计算机系统设备或非暂时性计算机可读存储设备来执行的软件中。可以将技术的程序方面视为通常以某种类型的机器可读介质来承载或体现的可执行代码和/或关联数据的形式的“产品”或“制品”。有形的非暂时性“存储”类型的介质和设备包括用于计算机、进程等的任何或所有的内存或其他存储器,或其相关的模块,例如各种半导体存储器、磁带驱动器、磁盘驱动器、光盘或磁盘,以及可以随时为软件编程提供存储的部件。
[0087]
图4显示了由非暂时性程序计算机可读存储器存储设备306执行的将所检索到的地震模型输入数据分解为用于不规则生成的共排列波束中心的稀疏共排列波束的子程序207的流程图,其输出是生成共排列道集209。波束中心缺乏规律性主要是由于通过不规则的磁微脉动以及不规则的地形来获取数据所造成的。因此,本领域的普通技术人员将认识到所生成的分解的波束中心是规则的还是不规则的。无论通过本实施例的处理来形成波束中心看起来如何,操作系统计算机301的本领域的普通技术人员都必须通过使用计算机系统307向非暂时性计算机程序设备306指示该计算机实现方法是否通过使用规则或不规则的共排列波束形成来继续计算。对于分解过程207的期间的规则波束形成,在接收到来自计算机系统设备307的命令之后,非暂时性计算机程序设备306启动子例程。非暂时性计算机程序设备306向内存资源304发出信号,它将在子步骤402处开始检索陆地采集输入数据204。一旦非暂时性计算机程序设备306具有了所述数据,它就可以在步骤403处开始采集本地数据道集。尽管如此,因为数据太原始而不能处理,需要在步骤404使用本领域公知的算法(如低通、带通、波形等算法)来对本地数据道集进行滤波。由于地震波深入地球,为帮助探测地球内部的几何结构和物理特征提供了关键信息,因此对高分辨率空间复杂性和地球深处结构的理解受到地震站的数量和他们所记载的数据质量的限制。一个基本的解决方案是增加均匀分布的地震站(永久的或临时的,在陆上或海底)的密度。然而,由于仪器部署和维护的成本高昂,增加站点密度存在着问题。因此,与此相反,本领域的技术人员已经实施了一系列限幅过程,以便使用所部署的地震站并由传感器105检索的数据。限幅波形尽管进行了基本处理(例如带通滤波和消除仪器响应),但由于频率分量的混叠(也称为频率泄漏)而仍然存在问题,因为它涉及基本上是基于频率的运算的卷积或去卷积。为了执行这些基本的处理程序,也可以只选择波形的未限幅部分,但这需要在靠近限幅部分的波形的未限幅部分上应用阻尼锥度函数,这会造成地震数据的额外浪费(通常为30到50个样本)。靠近震中的地震记录比来自更远站点的数据传达了更有价值得多的震源和区域结构的信息。根据定义,越靠近炮点104,波形幅度通常更大,因此容易被限幅。随着地震站的密度增加(特别是对于临时地震阵列),计算机实现方法预计限幅波形的总数只会增加,因而执行必要的步骤405,其中使用最大限幅、最小限幅、锥宽、锥状,用于后续处理零相位整形小波。子例程207使用的地震小波是解释所依据的地震数据(道)与正在被解释的地质情况(反射系数)之间的联系,并且它必须被知道以正确解释地质情况。然而,它通常是未知的,并假定为宽带和零相位。提供这种宽带、零相位小波是去卷积的处理目标。不幸的是,这个目标很少实现,
并且保留在完全处理的陆地采集输入数据中的典型小波是混合相位的。混合相位小波的差异会导致错误联系和经常不正确的解释。因此,子例程207假定陆地采集输入数据包含几乎总是错的宽带
‑
零相位小波,并且执行小波整形步骤406,这导致混合相位小波保留在完全处理的地震数据中。然后在步骤407执行波束成形,以从经处理的小波中过滤时空信号。步骤407被设计成隔离在特定方向上传播的信号,并使用加权延迟及求和波束成形器。步骤407的输出是延迟信号的线性组合的平均值。换句话说,波束成形器的输出是通过对接收器信号的加权和延迟版本进行平均而形成的。延迟选择成使得波束成形器的通带指向空间中的特定方向,然后在步骤408用于计算相似度。计算相似度的步骤用于陆地采集输入数据的提炼。尽管存在背景噪声,但使用这种技术可以大大提高数据的分辨率。本领域的普通技术人员很快就会认识到,当试图推断一个区域的地下结构时,根据相似度分析所接收到的新数据通常更容易解释。非暂时性程序计算机可读存储器存储设备306也可以根据使用计算机系统设备307的普通技术人员的选择来使用加权相似度,以提高传统相似度的分辨率,或使传统相似度能够分析更复杂的地震数据。在本实施例中,相似度的计算可采用以下算法:
[0088][0089]
一旦陆地采集输入数据204已经被滤波,非暂时性程序计算机可读存储器存储设备306就向计算机系统设备307发出信号,以在监视器309上显示炮点和接收器事件,以及每个小波。通过观察监视器309,操作计算机系统设备307的本领域的普通技术人员很快就从会每个相似度中知道哪些事件和哪些小波是相关的,并执行通过使用计算机系统设备307的键盘310和鼠标311的组合来选择它们的步骤409。在选择后,监视器309中的图形用户界面向操作计算机系统设备307的普通技术人员呈现确认选择的要求。如果确认选择,则计算机系统设备307向非暂时性程序计算机可读存储器存储设备306发送消息,以在步骤410处将每个相似的所选事件和小波存储到内存资源304。如果选择未被确认,则非暂时性程序计算机可读存储器存储设备306再次通过计算机系统307的监视器309呈现事件和小波,以供选择。一旦选定的事件和小波在步骤410处被存储,系统退出子例程,并完成共传播道集的生成209。
[0090]
类似地,图5显示了由非暂时性程序计算机可读存储器存储设备306执行的将所检索到的地震模型输入数据分解为用于规则生成的共排列波束中心的稀疏共排列波束的子程序207的流程图,其输出是生成共排列道集209。在规则生成的共排列波束中心的情况下,该过程使用本领域公知的方法,主要包括快速傅立叶变换。在替代的或规则形成的波束下,非暂时性计算机程序设备306向内存资源304发出信号,因此它将在子步骤502处开始检索陆地采集输入数据204。一旦非暂时性计算机程序设备306具有所述数据,它就可以在步骤503开始获取本地数据道集。一旦已经从陆地获取输入数据204中获取了本地数据道集503,非暂时性程序计算机可读存储器存储设备306在步骤504处通过提取正弦和余弦序列并将时间函数转换为频率函数来进行快速傅立叶变换分析。此外,快速傅立叶变换(fft)使用有时称为danielson
‑
lanczos引理的恒等式来将长度为n的变换分解为长度为n/2的两个变换,从而减少n点所需的计算资源。非暂时性计算机程序设备306在步骤505处生成快速傅立叶变换,并在步骤506处向内存资源304发出信号,因而它将存储在步骤505处所生成的结
果。在成功完成fft存储后,内存资源304向非暂时性计算机程序设备306发出信号,开始检索步骤507,这将触发非暂时性计算机程序设备306,在步骤508处开始计算快速傅立叶逆变换。该变换是从配置空间到频率空间的转换,这对于探索某些问题的转换以提高计算效率和探索信号的功率谱来说非常重要。一旦已经计算了逆快速傅立叶变换(ifft),非暂时性计算机程序设备306就开始将ifft存储到内存资源304的过程,用于在分解期间进行后处理,并最终生成共排列道集。
[0091]
如本文所使用的术语“勘探区域”是指地质感兴趣的区域或体积,并且可以在任何测量尺度下与该区域或体积的几何形状、姿态和布置相关联。一个区域可能具有其中已发生的诸如折叠、断层、冷却、卸载和/或断裂的特征。
[0092]
如本文所使用的术语“计算”包括各种各样的动作,包括计算、确定、处理、推导、勘探、查找(例如,在表、数据库或另一数据结构中查找)、确信等。它还可以包括接收(例如接收信息)、访问(例如访问内存中的数据)等。而且,“计算”可以包括解析、选择、选定、构建等。
[0093]
如本文所用的术语“地表下”和“地下”是指在任何海拔高度上或在海拔范围内的任何一块陆地的顶面之下(无论是高于、低于还是处于海平面),和/或低于任何地面的地表(无论是高于、低于还是处于海平面)。
[0094]
除非另有明确说明,否则诸如“定义”、“创建”、“包括”、“代表”、“预分析”、“预定义”、“选择”、“构建”、“分配”、“创建”、“引入”、“消除”、“重新网格化”、“整合”、“发现”、“执行”、“预测”、“确定”、“输入”、“输出”、“识别”、“分析”、“使用”、“分发”、“干扰”、“增加”、“调整”、“合并”、“模拟”、“减少”、“分发”、“指定”、“提取”、“显示”、“执行”、“实现”和“管理”等术语可以指检索系统或其他电子设备的动作和过程,该系统或其他电子设备将某些电子设备的存储器(例如内存资源或非临时性计算机可读存储器)中的表示为物理量(电子,磁或光)的数据转换为存储器或传输设备或显示设备中的类似地表示为物理量的其他数据。
[0095]
本文公开的实施例还涉及计算机实现的系统,用作用于执行本文所述的操作的检索系统的一部分。该系统可以被特别地构造用于所需目的,或者它可以包括由存储在内存资源或非暂时性计算机可读存储器中的计算机程序或代码选择性地激活或重新配置的通用计算机。这样,计算机程序或代码可以被存储或编码在计算机可读介质中,或在某种类型的传输介质上实现。计算机可读介质包括用于以诸如计算机之类的机器可读的形式存储或传输信息的任何介质或机构(“机器”和“计算机”在本文中可同义地使用)。作为一个非限制性示例,计算机可读介质可包括计算机可读存储介质(例如只读存储器rom、随机存取存储器ram、磁盘存储介质、光学存储介质、闪存设备等)。传输介质可以是双绞线、同轴电缆、光纤或其他一些合适的有线或无线传输介质,用于传输信号,例如电、光、声或其他形式的传播信号(例如载波、红外信号、数字信号等)。
[0096]
本文所使用的接收系统或传感器105通常至少包括能够执行机器可读指令的硬件,以及用于执行产生期望结果的动作(通常是机器可读指令)的软件。另外,检索系统可以包括硬件和软件的混合体,以及计算机子系统。
[0097]
硬件通常至少包括具有处理器功能的平台,例如客户端计算机(也称为服务器)和手持处理设备(例如智能电话、个人数字助理pda或个人计算设备pcd)。此外,硬件可包括可以存储机器可读指令的任何物理设备,例如内存或其他数据存储器。其他形式的硬件包括
硬件子系统,例如包括诸如调制解调器、调制解调器卡、端口和端口卡之类的传输设备。
[0098]
软件包括存储在任何存储介质(例如ram或rom)中的任何机器代码,以及存储在其他设备(例如非暂时性计算机可读介质,例如外部硬盘驱动器或闪存)上的机器代码。软件可以包括源代码或目标代码,包含能够在客户端计算机、服务器计算机、远程桌面或终端中执行的任何指令集。
[0099]
软件和硬件的组合也可以用于为所公开的发明的某些实施例提供增强的功能和性能。一个示例是直接将软件功能制造到硅芯片中。因此,应当理解,硬件和软件的组合也包括在检索系统的定义内,因此本发明将其设想为可能的等效结构和等效方法。
[0100]
计算机可读介质或内存资源包括被动数据存储器,例如随机存取存储器(ram),以及半永久数据存储器,例如外部硬盘驱动器和外部数据库。另外,本发明的实施例可以体现在计算机的ram中,以将标准计算机转换为新的特定计算机器。
[0101]
数据结构是可以实现本发明的实施例的限定的数据组织。例如,数据结构可以提供数据的组织,或可执行代码的组织。数据信号可以跨非暂时性传输介质承载,并且跨各种数据结构存储和传输,因此可以用于传输本发明的实施例。
[0102]
可以将系统计算机设计为可在任何特定的体系结构上工作。例如,该系统可以在高性能计算系统上执行,该高性能计算系统通常包括物理上连接的或通过局域网、客户端
‑
服务器网络、广域网、互联网和其它便携式和无线设备及网络来连接的多个单台计算机的集合。
[0103]“输出设备”包括导致产生的直接行为,以及促进产生的任何间接行为。间接行为包括向用户提供软件,维护使用户能够通过其影响显示的网站,超链接至此类网站,或与执行此类直接或间接行为的实体合作。因此,用户可以单独操作或与第三方供应商合作,以便在显示设备上生成参考信号。显示设备可以作为输出设备包括在内,并且应适合于显示所需的信息,例如但不限于crt监视器、lcd监视器、等离子设备、平板设备或打印机。显示设备可以包括已经通过使用旨在用于评估、校正和/或改善显示结果的任何常规软件进行校准的设备(例如,已经使用监视器校准软件进行了调整的彩色监视器)。作为在显示设备上显示参考图像的附加或替代,根据本发明的方法可以包括向对象提供参考图像。“提供参考图像”可以包括通过物理、电话或电子传递的方式将参考图像创建或分发给对象,通过网络提供对参考图像的访问,或者向被配置为在对象工作站上运行的对象或包含参考图像的计算机创建或分发软件。在一个示例中,提供参考图像可以涉及使对象能够经由打印机获得硬拷贝形式的参考图像。例如,信息、软件和/或指令可以被传输(例如,通过数据存储器或硬拷贝以电子或物理方式)和/或以其他方式可用(例如,通过网络),以便于主体使用打印机来打印硬拷贝形式的参考图像。在这样的示例中,打印机可以是已经通过使用旨在用于评估、校正和/或改善打印结果的任何常规软件进行了校准的打印机(例如,已经使用颜色校正软件来调节的彩色打印机)。
[0104]
一个数据库或多个数据库可以包含任何标准或专有数据库软件,例如oracle,microsoft access,sybase或dbase ii。数据库可以具有字段、记录、数据和其他数据库元素,它们可以通过数据库专用软件进行关联。另外,可以映射数据。映射是将一个数据条目与另一个数据条目相关联的过程。例如,可以将包含在字符文件位置中的数据映射到第二个表中的字段。数据库的物理位置没有限制,并且数据库可以是分布式的。例如,数据库可
能位于服务器的远程位置,并在单独的平台上运行。此外,可以在局域网和因特网的无线网络上访问数据库。
[0105]
此外,模块、特征、属性、方法和其他方面可以被实现为软件、硬件、固件或其任何组合。在本发明的部件被实现为软件时,该部件都可以被实现为独立程序,作为较大程序的一部分,多个独立程序,静态或动态链接库,内核可加载模块,设备驱动程序,和/或计算机编程领域的技术人员现在或将来已知的所有其他方式。另外,本发明不限于在任何特定的操作系统或环境中的实现。
[0106]
下面定义本文所使用的各种术语。对于在下面未对定义的在权利要求中使用的术语来说,应给予相关领域的技术人员所给出的反映在至少一个印刷出版物或授权专利中的最广泛可能的定义。
[0107]
如本文所使用的置于第一实体和第二实体之间的“和/或”是指(1)第一实体、(2)第二实体以及(3)第一实体和第二实体中的一个。用“和/或”列出的多个元素应以相同的方式解释,即,如此连接的元素中的“一个或多个”。
[0108]
另外,附图中的流程图和框图示出了根据本发明的各种实施例的系统、方法和计算机程序产品的可能实现的架构、功能和操作。还应注意,在一些替代实施方式中,方框中指出的功能可以不按图中指出的顺序发生。例如,取决于所涉及的功能,实际上可以基本上同时执行连续示出的两个方框,或者有时可以相反的顺序执行这些方框。还应注意,框图和/或流程图中的每个方框以及框图和/或流程图中的方框的组合可以由执行指定的硬件功能或动作的基于专用硬件的系统或者专用硬件和计算机指令的组合来实现。
[0109]
尽管在前述说明书中已经针对本发明的某些优选实施例描述了本发明,并且出于说明的目的已经阐述了许多细节,但是本发明不应不当地限于已经出于说明性目的而阐述的前述内容。相反,在不背离如以下权利要求书所限定的本发明的真实范围的情况下,多种修改和替代实施例对于本领域技术人员将是显而易见的。另外应当理解,在本文的任何一个实施例中示出或描述的结构特征或方法步骤也可以在其他实施例中使用。
[0110]
符号列表
[0111]
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。