技术特征:
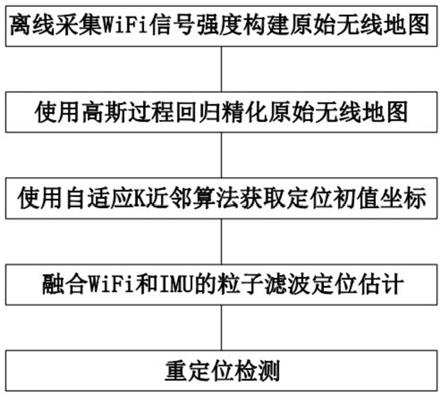
1.一种基于wifi和imu融合的室内定位方法,其特征在于,包括如下步骤:步骤一、离线采集wifi信号强度构建原始无线地图;步骤二、使用高斯过程回归对构建的原始无线地图进行拟合,训练得到符合真实信号分布的真实无线地图;步骤三、实时获取周围wifi节点的rss数据,然后根据真实无线地图中的训练数据使用自适应k近邻算法获取wifi节点的定位初值坐标;步骤四、采用融合wifi和imu的粒子滤波对获取的定位初值坐标进行定位估计;步骤五、计算步骤四采用融合定位得到的定位估计与使用自适应k近邻算法计算k时刻的wifi节点的定位估计之间的定位误差,并判断该定位误差是否超过设定的误差阈值,若超过,则进行重定位,并选择融合定位得到的定位估计代替k时刻的wifi节点的定位估计,以此为下一轮粒子滤波的定位初值。2.根据权利要求1所述的一种基于wifi和imu融合的室内定位方法,其特征在于,步骤一具体包括:离线阶段,在室内定位区域中预先布置m个wifi节点,并对室内地图进行栅格化,将定位区域划分为n个栅格,每个栅格的坐标表示为z
i
=(x
i
,y
i
),i∈[1,n],通过采集这n个栅格内的wifi信号强度rss,得到每个栅格的wifi信号强度向量r
i
=[r
i1
,r
i2
,...,r
im
]
t
,从而构建出室内场景的原始无线地图d={(z1,r1),(z2,r2),...,(z
n
,r
n
)}。3.根据权利要求2所述的一种基于wifi和imu融合的室内定位方法,其特征在于,步骤二具体包括:以rss分布的对数衰减模型为先验,则先验分布可以表示为f(x)~n(μ
f
,k
ff
),其中x表示位置坐标,μ
f
表示rss分布的均值,k
ff
表示rss分布的协方差;给定步骤一所建立的rss观测数据(x*,y*),其中x*,y*分别表示栅格坐标和对应的rss向量值;通过假设y*与f(x)服从联合高斯分布,可以计算得到rss的后验分布f*(x),从而得到更准确的rss信号分布的无线地图。4.根据权利要求1所述的一种基于wifi和imu融合的室内定位方法,其特征在于,步骤三具体包括:定位阶段,在线实时获取周围wifi节点的rss数据r
q
=[r
q1
,r
q2
,...,r
qm
]
t
,将其与真实无线地图中的训练数据r
ti
=[r
t1
,r
t2
,...,r
tm
]
t
,i∈[1,n]一一匹配,计算两者间的差异度d
i
;对差异度从小到大排序,设定差异度阈值d
th
,选择小于阈值的差异度对应的训练点作为定位候选点{(x
k
,y
k
)}
k∈[1,k]
;根据计算得到的候选点坐标{(x
k
,y
k
)}及其差异度d
k
,加权计算出定位初值坐标(x0,y0)。5.根据权利要求1所述的一种基于wifi和imu融合的室内定位方法,其特征在于,步骤四具体包括:粒子初始化,由定位初值坐标(x0,y0)生成随机采样粒子{(x
i
,y
i
)}
i∈[1,p]
,p为粒子个数;重要性采样,考虑连续两帧wifi信号帧k
‑
1时刻到k时刻,对于所有粒子,根据两帧间采集到的imu数据进行状态递推:y
ik
=f
y
(y
ik
‑1,s
k
,θ
k
)
x
ik
=f
x
(x
ik
‑1,s
k
,θ
k
)其中,位移s
k
由步长公式根据加速度计值计算得到,航向角θ
k
由角速度计和磁力计融合计算得到;通过高斯过程回归模型,计算出粒子所在位置的rss预测值,根据k时刻实时采集到的rss真实值,计算粒子的权重w
ik
;计算粒子的权重和sum(w
ik
),并对每个粒子进行权重归一化:通过对粒子坐标按权重进行加权,更新k时刻的定位估计:粒子重采样,对粒子集{(x
ik
,y
ik
),w
ik
}进行重采样,重采样后的粒子集为6.根据权利要求1所述的一种基于wifi和imu融合的室内定位方法,其特征在于,步骤五具体包括:使用自适应k近邻算法计算k时刻的wifi节点的定位估计对于步骤四采用融合定位得到的位置估计(x
k
,y
k
),计算两者之间的定位误差然后设定误差阈值τ,如果定位误差超过该误差阈值τ,则需要进行重定位,并选择融合定位得到的定位估计代替k时刻的wifi节点的定位估计,以此为下一轮粒子滤波的定位初值。
技术总结
本发明公开了一种基于WiFi与IMU融合的室内定位方法,涉及室内定位技术领域,具体包括如下步骤:离线采集WiFi信号强度构建无线地图;高斯过程回归精化无线地图;使用自适应K近邻算法获取定位初值;融合WiFi和IMU的粒子滤波进行定位估计。本发明与现有技术相比,具有如下有益效果:使用高斯过程回归精细化原始无线地图,将离散的指纹数据库替换为WiFi节点的RSS信号强度分布模型,更好地拟合了真实的信号强度分布;利用粒子滤波融合WiFi和IMU数据进行定位估计,并引入重定位机制抑制较大定位误差,提高了定位精度和频率。提高了定位精度和频率。提高了定位精度和频率。
技术研发人员:孙炜 罗敏辉
受保护的技术使用者:湖南大学
技术研发日:2021.10.15
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。