1.本技术涉及输电线路的领域,尤其是涉及一种输电线路防外力破坏检测装置及具有其的杆塔。
背景技术:
2.随着国家电网生产力水平的发展,输电线路的分布也越来越广,很多输电线路需要跨越河流、山川、公路、施工现场等特殊场地,在这些特殊场地中,输电线路由于自身悬空、落空的架设方式,容易遭到如树木挂线、异物碰线、施工碰线、山火以及人为盗窃等外力破坏,因此需要对输电线路的保护区进行实时监控。
3.相关技术中如申请公布号为cn109377696a的中国发明专利申请公开的一种输电线路通道防外力破坏自动预警装置,该装置包括:监测前端,监测前端用于将检测数据汇总和反馈,监测前端、移动客户端和pc端通讯连接。监测前端包括有反馈设备箱,每个反馈设备箱通讯连接有一个或者多个监控节点,监控节点包括有摄像头和红外微波。
4.但是,输电线路需要不间断地进行监控,导致摄像头需要长时间工作,功耗较大。
技术实现要素:
5.本技术目的一是提供一种输电线路防外力破坏检测装置,具有减少功耗的特点。
6.本技术的上述发明目的一是通过以下技术方案得以实现的:输电线路防外力破坏检测装置,包括:雷达探测器,用于对警戒区内的异物进行位置检测,并发送预警信号;控制箱,所述控制箱与所述雷达探测器电性连接,所述控制箱接收到预警信号后,发送激活信号;监控摄像头,所述监控摄像头电性连接于所述控制箱,所述监控摄像头接收到激活信号后,所述监控摄像头从休眠模式切换至激活模式,处于激活状态的所述监控摄像头能够进行图像采集;所述控制箱设置有无线通讯模块,所述无线通讯模块用于与远程终端之间建立通讯连接。
7.通过采用上述技术方案,雷达探测器能够不间断地对警戒区进行实时扫描,而监控摄像头在正常情况下基本处于休眠状态。当有异物进入警戒区内时,雷达探测器向控制箱发送预警信号,控制箱收到预警信号后将监控摄像头从休眠状态切换至激活状态,监控摄像头激活后开始对输电线路的保护区域进行图像采集,并将采集到的图像信息发送给控制箱。控制箱能够基于图像信息进行数据分析,并通过无线通讯模块向远程终端发送监控信息,实现对电力设施保护区异物侵入危害的全天时可视化智能监控。
8.雷达探测器具有低功耗运行的特点,较监控摄像头而言功率较低,在没有检测到异物入侵时,输电线路防外力破坏检测装置仅通过雷达探测器进行扫描,长时间处于低功耗状态,当雷达探测器探测到异物入侵后,再激活唤醒监控摄像头进行进一步地可视化监
控,从而降低整体的功耗,更加节能。
9.可选的,还包括用于将所述控制箱安装固定于杆塔的支架,所述支架设置有能够与所述杆塔的角钢配合的夹持组件,所述夹持组件包括第一夹持件和第二夹持件,所述第一夹持件包括第一安装部和第一固定部,所述第一安装部和所述第一固定部呈直角设置,所述第一固定部与所述支架通过固定件可拆卸连接,所述第一固定部和所述支架之间能够留有距离以供所述角钢容置;所述第二夹持件包括第二安装部和第二固定部,所述第二安装部和所述第二固定部呈直角设置,所述第二固定部与所述支架通过固定组件可拆卸连接,所述第二固定部和所述支架之间能够留有距离以供所述角钢容置;所述第一安装部和所述第二安装部之间通过安装组件可拆卸连接,且所述第一安装部和所述第二安装部之间设置有供所述角钢容置的空间。
10.通过采用上述技术方案,第一安装部和第一固定部呈直角设置,可以与角钢的实际形状进行高度配合,同理,第二安装部和第二固定部也可以与角钢的实际形状进行高度配合。在支架与杆塔安装固定时,操作人员可以将角钢安装于第一安装部、第二安装部和第一固定部之间,也可以将角钢安装于第一安装部、第二安装部和第二固定部之间,从而使第一夹持件、第二夹持件和支架三者能够配合夹紧固定角钢,由于第一夹持件、第二夹持件和支架三者之间同时具有直角结构进行限位,并且能够配合夹紧结构进行固定,因此支架能够较为稳定地固定于杆塔上。
11.可选的,所述安装组件包括安装螺栓和能够与所述安装螺栓螺纹配合的安装螺母;所述第一安装部和所述第二安装部均设置有供所述安装螺栓穿设的安装调节孔,且所述安装螺栓能够沿所述安装调节孔的长度方向进行滑移。
12.通过采用上述技术方案,操作人员可以将角钢安装于第一安装部、第二安装部和第一固定部之间,也可以将角钢安装于第一安装部、第二安装部和第二固定部之间,因此,安装螺栓穿设于第一安装部的位置会与安装螺栓穿设于第二安装部有所不同,安装调节件可以为安装螺栓提供一定的调节空间,方便操作人员进行安装固定。
13.可选的,所述安装螺母包括预装螺母和紧配螺母,所述预装螺母和所述紧配螺母沿所述安装调节孔的长度方向设置;所述预装螺母的最大宽度小于等于所述安装调节孔的宽度,所述预装螺母的最大长度大于所述安装调节孔的宽度,以使所述预装螺母能够在某一角度穿设于所述安装调节孔;所述紧配螺母的最小宽度大于所述安装调节孔的宽度。
14.通过采用上述技术方案,操作人员在安装第一安装部和第二安装部时,可先将预装螺母与安装螺栓螺纹连接,然后将预装螺母转动到合适的角度,并将预装螺母依次穿设于第一安装部和第二安装部上的安装调节孔,再将预装螺母转动到合适的角度,使预装螺母能够卡在安装调节孔外,然后再拧紧安装螺栓。在上述安装预装螺母的过程中,由于预装螺母和安装螺栓已经预先安装,操作人员不需要先使安装螺栓穿设于第一安装部和第二安装部,再对准安装螺栓和预装螺母进行螺纹装配,更加方便,提高工作效率。
15.操作人员在安装完预装螺母后,可通过另外一个安装螺栓来安装紧配螺母,紧配螺母一方面能够配合预装螺母对第一安装部和第二安装部进行固定,减少第一安装部和第
二安装部发生分离的风险,还可以阻挡预装螺母自行发生转动,减少预装螺母由于抖动自行脱离安装调节孔的风险,降低维护成本。
16.可选的,所述支架设置有用于固定所述控制箱的支撑板,所述支撑板设置于所述控制箱的两侧,所述支撑板均设置有支撑螺栓,所述支撑螺栓穿设于所述支撑板并与所述控制箱连接。
17.通过采用上述技术方案,控制箱的两侧分别通过支撑螺栓与支撑板可拆卸固定,方便操作人员拆卸控制箱进行维修。
18.可选的,所述控制箱设置有遥控云台,所述遥控云台与所述控制箱电性连接,所述监控摄像头安装于所述遥控云台的活动端。
19.通过采用上述技术方案,管理人员可通过远程终端向控制箱发生控制指令,控制箱根据控制指令控制遥控云台带动监控摄像头进行移动,以供管理人员可以远程遥控监控摄像头,并调整监控摄像头的监控视野范围,更加方便,并且监控摄像头可活动的方式可以减少监控死角,更加安全。
20.可选的,所述控制箱转动连接有承托件,所述雷达探测器安装于所述承托件;所述控制箱设置有用于驱使所述承托件发生转动以改变所述承托件与水平面之间的倾斜角度的驱动组件,所述驱动组件电性连接于所述控制箱。
21.通过采用上述技术方案,雷达探测器具有自身的探测区域,雷达探测器的倾斜角度也决定了自身探测区域的位置,驱动组件可以驱使承托件带动雷达探测器转动,改变雷达探测器的倾斜角度,从而能够使雷达探测器的探测区域能够包含警戒区。管理人员可通过远程终端向控制箱发生控制指令,控制箱根据控制指令控制驱动组件工作,以远程遥控调节雷达探测器的倾斜角度。
22.可选的,所述输电线路防外力破坏检测装置采用以下方法调节所述雷达探测器的倾斜角度:原始数据采集:确定最低危险位置、安全距离、安装高度和安装倾斜度;其中,所述最低危险位置指的是电线的最大弧垂位置,所述安全距离指的是物体到所述最低危险位置之间的最小距离,所述安装高度指的是所述雷达探测器的高度,所述安装倾斜度指的是所述雷达探测器的倾斜度;调整数据确定:基于最低危险位置和安全距离,确定最低探测位置,并基于最低探测位置、安全距离和安装高度,确定有效倾斜度;其中,所述最低探测位置指的是物体能够与所述最低危险位置最为接近的位置,所述有效倾斜度指的是当所述最低探测位置位于所述雷达探测器的探测区域内时,所述雷达探测器的倾斜度;探测范围调节:基于有效倾斜度,调节雷达探测器的倾斜角度。
23.通过采用上述技术方案,最低危险位置和安全距离可以确定最低探测位置,即雷达探测器最低的目标探测位置,雷达探测器起码能够对最低探测位置进行探测,才能进行异物入侵探测。利用最低探测位置、安全距离和安装高度,能够计算有效倾斜度。当前的雷达探测器的倾斜角度需要达到有效倾斜度,才能满足对最低探测位置进行检测的要求,因此,根据有效倾斜度对雷达探测器进行倾斜角度调整,可使雷达探测器满足对最低探测位置进行检测的要求。
24.操作人员可以通过远程遥控的方式,调节雷达探测器的倾斜角度,不需要操作人
员在杆塔上对雷达探测器进行完整的倾斜角度调整,更加方便和安全。
25.可选的,所述支撑板还设置有调节螺栓,所述调节螺栓穿设于所述支撑板并与所述控制箱连接;所述支撑螺栓位于邻近的所述调节螺栓的上方,所述支撑板设置有供所述调节螺栓穿设的倾角调节孔,所述倾角调节孔呈弧形设置;所述调节螺栓能够在所述倾角调节孔内滑动,且所述控制箱能够跟对所述调节螺栓的滑动而围绕所述支撑螺栓转动。
26.通过采用上述技术方案,操作人员在安装控制箱时,可以先转动控制箱,将雷达探测器调整至指定的倾斜角度,如倾斜角度为0
°
,方便后续对雷达探测器进行倾斜角度调节。
27.本技术目的二是提供一种杆塔,具有减少功耗的特点。
28.本技术的上述发明目的二是通过以下技术方案得以实现的:杆塔,具有上述一种输电线路防外力破坏检测装置。
附图说明
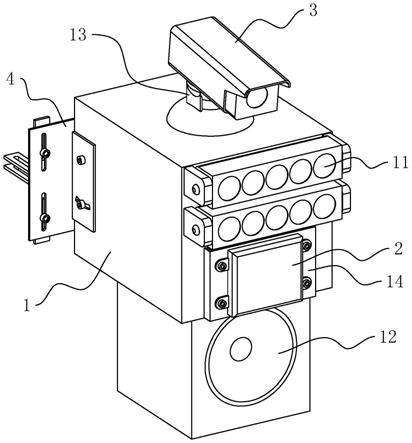
29.图1是本技术的输电线路防外力破坏检测装置的结构示意图。
30.图2是本技术的输电线路防外力破坏检测装置的电学模块示意图。
31.图3是图1中的本控制箱、支架、第一夹持件和第二夹持件之间的爆炸示意图。
32.图4是图1中的支架与角钢固定时的状态示意图,其中,角钢接近于垂直设置的一边位于其上部。
33.图5是图4中的第一安装部、第二安装部和安装组件之间的爆炸示意图。
34.图6是驱动组件的结构示意图。
35.图7是雷达探测器探测区域的范围示意图。
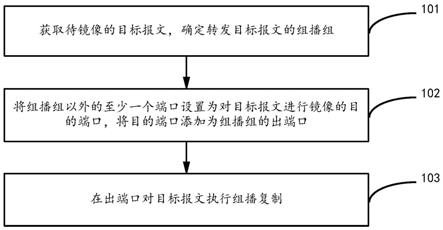
36.图8是调节雷达探测器的倾斜角度的方法的流程示意图。
37.图9是本技术的具有输电线路防外力破坏检测装置的杆塔的结构示意图。
38.图中,1、控制箱;11、警示灯;12、警示音响;13、遥控云台;14、承托件;2、雷达探测器;3、监控摄像头;4、支架;41、支撑板;411、支撑螺栓;4111、支撑螺母;412、调节螺栓;4121、调节螺母;413、倾角调节孔;42、固定调节孔;5、第一夹持件;51、第一安装部;511、安装调节孔;52、第一固定部;6、第二夹持件;61、第二安装部;62、第二固定部;621、固定孔;7、固定组件;71、固定螺栓;72、固定螺母;8、安装组件;81、安装螺栓;82、安装螺母;821、预装螺母;8211、阻挡块;822、紧配螺母;9、驱动组件;91、联动杆;92、涡轮;93、蜗杆;94、驱动电机。
具体实施方式
39.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
40.本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,如无特殊说明,一般表示前后关联对象是一种“或”的关系。
41.另外,本实施例中各步骤的标号仅为方便说明,不代表对各步骤执行顺序的限定,在实际应用时,可以根据需要各步骤执行顺序进行调整,或同时进行,这些调整或者替换均属于本发明的保护范围。
42.下面结合说明书附图1
‑
图9对本技术实施例作进一步详细描述。
43.实施例一:本技术实施例提供一种输电线路防外力破坏检测装置。参照图1和图2,输电线路防外力破坏检测装置包括控制箱1、雷达探测器2和监控摄像头3,雷达探测器2和监控摄像头3均安装于控制箱1上。控制箱1内置有控制模块和无线通讯模块,雷达探测器2、监控摄像头3和无线通讯模块均电性连接于控制模块。其中,雷达探测器2用于对警戒区进行扫描探测,雷达探测器2全天时不间断地处于低功耗工作模式,雷达探测器2扫描到有异物进如警戒区时,则发送预警信号至控制模块。
44.参照图1和图2,监控摄像头3在正常情况下处于休眠状态,当控制信号接收到预警信号后,会向监控摄像头3发送激活信号,以使监控摄像头3从休眠状态切换至激活状态,监控摄像头3激活唤醒后开始对输电线路的保护区域进行图像采集并自动录像,达到可视化监控的目的,且监控摄像头3将监控信息发送至控制模块。无线通讯模块能够连接网络服务器,并通过网络服务器与远程终端建立网络通讯,从而使控制模块与远程终端建立通讯。控制模块通过无线通讯模块向远程终端转发预警信号和监控信号,以使操作人员可以通过远程终端获知异物入侵警戒区的信息,并且操作人员可以通过监控摄像头3实时查看监控环境。
45.参照图1,在本实施例中,雷达探测器2优选为毫米波雷达,毫米波雷达适于低功耗状态下实时外侵 物体识别及高精度测量工作,并且毫米波雷达穿透能力强,受光线、雨、雾、雪等气候环境因素的干扰影响较少,能够实现全天候不间断扫描探测。远程终端可以为笔记本电脑,也可以为pc端,也可以为智能手机。
46.参照图1和图2,优选的,控制箱1还安装有警示灯11和警示音响12,警示灯11和警示音响12均电性连接于控制模块。操作人员可通过远程终端向控制模块发送控制指令,控制模块能够控制警示灯11照亮对应的区域并通过警示音响12发出警示语音,达到声光警告的目的。
47.参照图2,在本实施例中,输电线路防外力破坏检测装置还包括有供电单元,雷达探测器2、监控摄像头3、控制箱1、警示灯11和警示音响12均电性连接于供电单元的供电回路。优选的,供电单元包括太阳能光伏组件和蓄电池组,两者配合实现供电。
48.参照图1,具体的,监控摄像头3、警示灯11、雷达探测器2和警示音响12从上至下依次设置,其中监控摄像头3设置于控制箱1的顶端,警示灯11和雷达探测器2均栓接于控制箱1的前侧,警示音响12栓接于控制箱1的底端。
49.参照图1和图2,控制箱1设置有用于移动监控摄像头3的遥控云台13,遥控云台13的底座栓接于控制箱1的顶端,遥控云台13的活动端栓接于监控摄像头3,遥控云台13的控制电路电性连接于控制模块。管理人员可通过远程终端向控制箱1发生控制指令,控制箱1根据控制指令控制遥控云台13带动监控摄像头3进行移动,以供管理人员可以远程遥控监控摄像头3,并调整监控摄像头3的监控视野范围,更加方便,并且监控摄像头3可活动的方式可以减少监控死角,更加安全。
50.参照图1和图2,为了将控制箱1固定安装到杆塔上,输电线路防外力破坏检测装置还包括有支架4,支架4能够用于与杆塔中的角钢配合安装。其中,角钢为两边互相垂直成角形的长条钢材,是杆塔常用的受力构件,本文中不对角钢的本身结构加以赘述。
51.参照图3,支架4位于控制箱1远离雷达探测器2的一侧,支架4焊接有两个支撑板41,两个支撑板41分别垂直于支架4,且两个支撑板41之间留有距离形成供控制箱1容纳的空间。两个支撑板41分别贴合于控制箱1的两侧,每一个支撑板41均设置有一个支撑螺栓411,支撑螺栓411依次穿设于支撑板41和控制箱1,且控制箱1内设置有与支撑螺栓411螺纹连接的支撑螺母4111,使支撑板41和控制箱1在支撑螺栓411的轴向上相对固定。
52.参照图3,为使支撑板41和控制箱1之间的固定更加稳定,每一个支撑螺栓411的下方还设置有一个调节螺栓412,调节螺栓412依次穿设于支撑板41和控制箱1,且控制箱1内焊接有与调节螺栓412螺纹连接的调节螺母4121。在本实施例中,支撑板41开设有供调节螺栓412穿设的倾角调节孔413,倾角调节孔413以支撑螺栓411为圆心呈弧形设置。当操作人员拧松调节螺栓412时,操作人员可推动控制箱1,使控制箱1和支撑板41以支撑螺栓411为转轴进行转动,且随着控制箱1的转动,调节螺栓412会在倾角调节孔413内滑动;当操作人员拧紧调节螺栓412后,调节螺栓412抵紧支撑板41,支撑板41和控制箱1相对固定。
53.参照图3,操作人员在将支架4安装固定到角钢上时,由于角钢本身的角度设置,支架4可能会发生倾斜,导致安装于控制箱1上的雷达探测器2也发生倾斜。由于雷达探测器2本身的探测范围有限,只能对自身有效探测区域内的物体进行扫描,为了减少支架4倾斜导致雷达探测器2的有效探测区域严重偏离预设的探测区域,操作人员可以在固定安装完支架4之后,通过调节螺栓412来调节控制箱1的倾斜度,以对雷达探测器2的探测角度进行矫正。
54.参照图3,为了与角钢进行配合固定,支架4设置有两组夹持组件,两组夹持组件间隔设置,支架4能够通过两组夹持组件夹持吊挂在角钢上。每一组夹持组件均包括有配合工作的第一夹持件5和第二夹持件6,在本实施例中,第一夹持件5和第二夹持件6分别为一体成型的钢材构件。
55.参照图3,第一夹持件5包括有第一安装部51和第一固定部52,第一安装部51和第一固定部52之间形成直角。第二夹持件6包括有第二安装部61和第二固定部62,第二安装部61和第二固定部62之间形成直角。其中,第一夹持件5位于第二夹持件6的上方,第一安装部51和第二安装部61位于第一固定部52和第二固定部62之间。
56.参照图3,在本实施例中,第一固定部52和第二固定部62均通过固定组件7与支架4可拆卸式安装固定,其中,固定组件7包括有固定螺栓71和固定螺母72。支架4开设有供固定螺栓71穿设的固定调节孔42,固定调节孔42的宽度大于固定螺栓71的螺杆部且小于固定螺栓71的螺帽部,固定调节孔42的数量为4,各个固定调节孔42均沿竖直方向延伸。
57.参照图3,第一固定部52和第二固定部62均开设有供固定螺栓71的螺杆部穿设的固定孔621。固定螺栓71的螺杆部依次穿设于固定调节孔42和固定孔621,并与固定螺母72螺纹连接。
58.参照图4,角钢的其中一边能够容纳于第一固定部52和支架4之间,也可以容纳于第一固定部52和支架4之间,具体由角钢本身的设置决定。当角钢接近于垂直设置的一边位于其上部时,角钢的上部需要固定于第一固定部52和支架4之间,则第一固定部52和支架4
可以留出供角钢的上部容纳的间隙,操作人员拧紧第一固定部52对应的固定螺栓71后,第一固定部52和支架4能够配合夹紧角钢的上部;当角钢接近垂直设置的一边位于其下部时,角钢的下部需要固定于第二固定部62和支架4之间,则第二固定部62和支架4可以留出供角钢的下部容纳的间隙,操作人员拧紧第二固定部62对应的固定螺栓71后,第二固定部62和支架4能够配合夹紧角钢的下部。
59.参照图4,在本实施例中,第一安装部51和第二安装部61之间通过安装组件8可拆卸式安装固定。利用固定调节孔42的设置,当操作人员没有拧紧第一固定部52或第二固定部62上的固定螺栓71时,第一固定部52或第二固定部62可以与支架4发生相对移动,从而使第一安装部51和第二安装部61之间可以发生相对位移。在安装角钢时,操作人员一方面需要将角钢的其中一边固定于第一固定部52和支架4之间或者第一固定部52和支架4之间;另一方面,操作人员还需要将角钢的另一边固定于第一安装部51和第二安装部61之间,具体的,则是需要使第一安装部51和第二安装部61配合接近于角钢的另一边的两侧,然后通过安装组件8固定第一安装部51和第二安装部61,使第一安装部51和第二安装部61夹紧固定角钢。
60.参照图3和图4,第一安装部51和第一固定部52呈直角设置,可以与角钢的实际形状进行高度配合,同理,第二安装部61和第二固定部62也可以与角钢的实际形状进行高度配合。当支架4与角钢安装固定完成之后,第一夹持件5、第二夹持件6和支架4三者能够配合夹紧固定角钢,由于第一夹持件5、第二夹持件6和支架4三者之间同时具有直角结构进行限位,并且能够配合夹紧结构进行固定,因此支架4能够较为稳定地固定于杆塔上。
61.参照图4和图5,具体的,安装组件8包括有安装螺栓81和安装螺母82。第一安装部51和第二安装部61均开设有供安装螺栓81穿设的安装调节孔511,安装调节孔511呈长条状分布;安装调节孔511的宽度大于安装螺栓81螺杆部的外径,且小于安装螺栓81螺帽部的外径。安装螺栓81穿设于第一安装部51和第二安装部61并与安装螺母82螺纹连接,以使第一安装部51和第二安装部61能够固定夹紧于角钢的两侧。
62.参照图5,在本实施例中,由于角钢的一边固定于第一固定部52或者第二固定部62,第一安装部51和第二安装部61难以完全对准;安装调节孔511呈长条状的设置,可以使第一安装部51和第二安装部61不完全对准时,安装螺栓81依然可以穿设于第一安装部51和第二安装部61,方便操作人员进行安装。
63.参照图4和图5,进一步的,安装螺母82包括有预装螺母821和紧配螺母822,在本实施例中,每一组第一安装部51和第二安装部61之间设置有至少一个预装螺母821和至少一个紧配螺母822。其中,预装螺母821的中部开设有供安装螺栓81螺纹连接的螺纹孔,预装螺母821的两侧分别对称设置有两个阻挡块8211。阻挡块8211的一侧设置有受力面,当预装螺母821和安装螺栓81螺纹连接时,受力面垂直于安装螺栓81的轴线;阻挡块8211的另一侧边缘处倾斜设置有倒角面,倒角面与受力面之间形成夹角。在本实施例中,两个阻挡块8211的端部之间距离为预装螺母821的最大长度,预装螺母821的最大长度大于安装调节孔511的宽度,且小于安装调节孔511的长度;预装螺母821的最大宽度小于安装调节孔511的宽度。
64.参照图4和图5,操作人员在安装预装螺母821时,可使预装螺母821的受力面正对安装螺栓81,并将预装螺母821与安装螺栓81螺纹连接,使预装螺母821和安装螺栓81之间留出供第一安装部51和第二安装部61容纳的空间。然后,操作人员可将预装螺母821调整至
两个阻挡块8211与安装调节孔511对准的角度,然后使预装螺母821、阻挡块8211和安装螺栓81的螺杆直接穿过第一安装部51和第二安装部61,再转动预装螺母821,使阻挡块8211卡接于安装调节孔511外,难以再次穿过安装调节孔511,最后保持预装螺母821的位置并拧紧安装螺栓81,使预装螺母821和安装螺栓81抵紧第一安装部51和第二安装部61,从而使第一安装部51和第二安装部61夹紧角钢。
65.参照图4和图5,由于支架4安装的位置一般较高,操作人员需要在高度对支架4进行安装固定,且还没有安装完预装螺母821之前,支架4和角钢之间处于不固定的状态,操作人员需要对第一安装部51和第二安装部61施力以等待螺栓固定。利用上述安装方法,操作人员可提前固定好预装螺母821和安装螺栓81,免去了安装螺栓81穿过第一安装部51和第二安装部61之后,需要对准预装螺母821和安装螺栓81再螺纹连接的步骤,更加方便。待操作人员将预装螺母821安装完成之后,支架4和角钢之间实现初步的预装固定,分担操作人员对支架4的支撑,方便操作人员执行下一步的安装,并且更加方便,提高工作效率。
66.参照图4和图5,紧配螺母822的最小宽度大于安装调节孔511的宽度。操作人员在安装完预装螺母821后,可使用另外一个安装螺栓81,令紧配螺母822放置于预装螺母821的一侧;然后将安装螺栓81穿设于第一安装部51和第二安装部61并与紧配螺母822螺纹连接,使紧配螺母822和安装螺栓81抵紧第一安装部51和第二安装部61,从而使第一安装部51和第二安装部61夹紧角钢。另一方面,紧配螺母822占用预装螺母821的转动空间,可以阻挡预装螺母821自行发生转动,减少预装螺母821由于抖动自行脱离安装调节孔511的风险,降低维护成本。
67.参照图6,具体的,控制箱1安装有用于支撑雷达探测器2的承托件14,雷达探测器2栓接于承托件14上。在本实施例中,承托件14的上部通过转轴与控制箱1转动连接,承托件14可通过转动方式改变雷达探测器2的倾斜角度,控制箱1内设置有用于驱使承托件14发生转动的驱动组件9。
68.参照图6,驱动组件9包括有联动杆91、涡轮92、蜗杆93以及驱动电机94。其中,联动杆91的两端分别为驱动端和传动端,驱动端铰接于承托件14的下部,传动端铰接于涡轮92,且传动端与涡轮92之间铰接轴偏心设置于涡轮92;涡轮92转动连接于控制箱1,且涡轮92与蜗杆93啮合传动;蜗杆93转动连接于控制箱1;驱动电机94栓接于控制箱1内,且驱动电机94的输出轴通过锥齿轮传动结构传动连接于蜗杆93。
69.参照图6,当驱动电机94工作时,驱动电机94的输出轴带动蜗杆93转动,蜗杆93带动涡轮92转动,随着涡轮92发生转动,传动端围绕涡轮92的轴线发生圆周运动,并驱使驱动端发生移动,从而使驱动端逐渐远离控制箱1或靠近控制箱1,进而带动承托件14转动。
70.参照图6,在本实施例中,驱动电机94电性连接于控制箱1的控制模块,管理人员可通过远程终端向控制箱1发生控制指令,控制箱1根据控制指令控制驱动电机94工作,以使承托件14转动,进而远程遥控调整雷达探测器2的倾斜角度。设备管理人员可预先设置驱动电机94的输出参数,标定雷达探测器2的倾斜角度与驱动电机94的输出量之间的关系,从而使雷达探测器2可以通过远程遥控的方式控制调整至指定的角度。
71.参照图7,雷达探测器2自身具有预设的探测区域,且该探测区域与雷达探测器2的有效探测角度有关,探测区域也为雷达探测器2基于有效探测角进行扫描的扇形区域。当雷达探测器2发生倾斜时,雷达探测器2的探测区域的实际位置也会发生改变,管理人员在安
装雷达探测器2时,应标定好雷达探测器2的探测区域,即使雷达探测器2的探测区域包含预设的警戒区。在本实施例中,管理人员可通过远程终端遥控调节雷达探测器2的倾斜角度,以使雷达探测器2的探测区域包含预设的警戒区。
72.参照图7,在实际使用情况中,雷达探测器2的安装设置受多个因素的干扰,如:1.杆塔的警戒区基于电线的位置以及安全距离设置,安全距离指的是距离电线的最小距离,当异物与电线的距离小于安全距离时,异物则进入警戒区;由于电线呈弧形下垂,并且不同电压的电线安全距离不同,因此对于不同的杆塔,警戒区的分布可能存在很大不同,需要雷达探测器2调整至合适的高度和合适的倾斜角度,以使雷达探测器2的探测区域能够包含警戒区;2. 雷达探测器2的安装高度受角钢位置的限制,安装雷达探测器2时需要先确定雷达探测器2的高度,再通过雷达探测器2的高度设定倾斜角度;3.相邻两个杆塔之间的距离,若相邻两个杆塔之间的距离大于雷达探测器2的探测区域范围,则两个杆塔需要安装相互配合工作的雷达探测器2,以使两个雷达探测器2组合的探测区域能够包含警戒区。
73.参照图7和图8,本技术实施例还公开一种调节雷达探测器2的倾斜角度,以使雷达探测器2的探测区域满足探测要求的方法,具体包括以下步骤:s1、原始数据采集:确定最低危险位置、安全距离、安装高度和安装倾斜度。
74.其中,最低危险位置指的是电线的最大弧垂位置,安全距离指的是物体到所述最低危险位置之间的最小距离,安装高度指的是雷达探测器2的高度,安装倾斜度指的是雷达探测器2当前的倾斜度。
75.s2、调整数据确定:基于最低危险位置和安全距离,确定最低探测位置,并基于最低探测位置、安全距离和安装高度,确定有效倾斜度。
76.其中,最低探测位置指的是物体能够与所述最低危险位置最为接近的位置,最低探测位置即为警戒区的下限的最低点。有效倾斜度指的是当最低探测位置位于雷达探测器2的探测区域内时,雷达探测器2所需要达到的倾斜度,即雷达探测器2满足探测要求的倾斜度。
77.s3、探测范围调节:基于有效倾斜度和安装倾斜度之差,调节雷达探测器2的倾斜角度。
78.其中,管理人员在得知有效倾斜度和安装倾斜度之后,可远程遥控雷达探测器2发生转动,使雷达探测器2达到满足探测要求的倾斜度。
79.另外的,为了方便管理人员后续对安装倾斜度进行计算,操作人员在安装控制箱1时,可通过调节螺栓412调节控制箱1的倾斜度,以使雷达探测器2的倾斜度调整至0
°
,即使安装倾斜度为0
°
。管理人员在遥控雷达探测器2发生转动时,直接将雷达探测器2的倾斜度调整至有效倾斜度即可。
80.参照图7,以平原地区为例,相邻两个杆塔之间的距离为300m,塔高为30m,若雷达探测器2的探测区域为200m,需要在两边塔杆塔臂中间部位各安装一个雷达探测器2,以确保有效的警戒区范围。设电线电压为220kv,电线的安全距离为6m至8m,雷达探测器2的有效探测角是120
°
,雷达探测器2的安装位置为杆塔的10m塔臂位置处。通过计算出电线的最大弧垂位置,结合安全距离设定警戒区的位置,得到预设的警戒区;通过预设的警戒区与雷达
探测器2的探测区域进行对比,可以计算出雷达探测器2需要发生倾斜的角度,若雷达探测器2需要向上倾斜14
°
,则遥控雷达探测器2发生倾斜,使其向上倾斜14
°
。
81.本技术实施例的输电线路防外力破坏检测装置的实施原理为:雷达探测器2能够不间断地对警戒区进行实时扫描,而监控摄像头3在正常情况下基本处于休眠状态。当有异物进入警戒区内时,雷达探测器2向控制箱1发送预警信号,控制箱1收到预警信号后将监控摄像头3从休眠状态切换至激活状态,监控摄像头3激活后开始对监控区进行图像采集,并将采集到的图像信息发送给控制箱1。控制箱1能够基于图像信息进行数据分析,并通过无线通讯模块向远程终端发送报警信息,实现对电力设施保护区异物侵入危害的全天时可视化智能监控。
82.雷达探测器2具有低功耗运行的特点,较监控摄像头3而言功率较低,在没有检测到异物入侵时,输电线路防外力破坏检测装置仅通过雷达探测器2进行扫描,长时间处于低功耗状态,当雷达探测器2探测到异物入侵后,再激活唤醒监控摄像头3进行进一步地可视化监控,从而降低整体的功耗,更加节能。
83.实施例二:参照图9,在一个实施例中,提供一种杆塔,杆塔安装有输电线路防外力破坏检测装置,与上述实施例一中的输电线路防外力破坏检测装置相对应。
84.本实施例提供的杆塔,由于其结构,能实现前述实施例的功能,能够达到与前述实施例相同的技术效果,原理分析可参见前述方法步骤的相关描述,在此不再累述。
85.具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、方法、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。