1.本发明属于数据挖掘和城市交通数据分析领域,涉及交通识别模型的建立,特别是一种融合地理上下文的gps轨迹交通模式识别模型的建立及其识别方法。
背景技术:
2.在过去的几十年中,携带gps传感器的智能手机等设备广泛普及,并产生了大量的用户gps记录数据。例如微软亚洲研究院公开的geolife数据,加拿大蒙特利尔市公开的mtl数据等。同时,随着地理信息系统的不断发展,获取地理信息数据的手段也不断增多,如高德地图开放平台、openstreetmap等。这些数据为分析用户出行轨迹提供了强有力的支撑。
3.识别出行所采取的交通模式是对用户出行轨迹进行进一步分析的基础。用户出行所选择的交通模式是一种基础的行为特征,通过识别用户出行采取的交通模式,城市管理部门能够更有效地理解城市居民的出行方式,进而更好地调度交通系统。除此之外,用户的交通模式信息还有助于构建基于活动的用户模型。举例来说,识别出用户的交通模式能够帮助移动服务和广告推荐。
4.现有的研究技术主要包括:基于传统机器学习模型的方法和基于深度学习模型的方法。其中,基于传统机器学习的方法往往依赖于人工地从复杂的原始gps数据中设计和选择特征,这带来了高昂的时间成本。一方面,这类人工设计特征的方法往往需要从长距离、长时间的轨迹中进行特征提取,这导致这类方法在对短距离、短时间轨迹的识别上存在准确性低下的问题;另一方面,人工设计特征往往并不全面,导致模型的识别性能低下。现有的基于深度学习模型的轨迹交通模式识别模型在建模时往往只考虑了轨迹本身的运动特征,比如轨迹的速度、加速度等,而并未充分利用轨迹所处位置的地理上下文信息。城市的不同区域有不同的土地使用类型,不同的道路等级限速,这些地理上下文信息与轨迹的运动特征之间的联系是不可忽视的。
技术实现要素:
5.针对现有技术中不能有效利用轨迹的地理上下文信息,且在短时间、短距离轨迹上识别性能低下的技术问题,本发明的目的在于,提供一种融合地理上下文的深度多尺度交通模式识别模型urbtrans的建立和识别方法。
6.为了实现上述任务,本发明所采用如下的技术解决方案:
7.一种融合地理上下文的深度多尺度交通模式识别模型urbtrans的建立方法,其特征在于,包括如下步骤:
8.步骤一,获取城市区域的地理信息数据,将gps轨迹与地理信息数据进行位置匹配,获取gps轨迹的地理上下文特征图;
9.步骤二,从原始gps轨迹中计算轨迹的速度、加速度,获取gps轨迹的运动特征图;
10.步骤三,建立深度多尺度交通模式识别模型urbtrans,urbtrans的组成包括并行的具有不同感受野大小的一维卷积网络、长短期记忆网络以及全连接网络;其中:
11.所述并行的具有不同感受野大小的一维卷积网络,用于从gps轨迹的地理上下文特征图和gps轨迹的运动特征图提取不同尺度的深度特征并建立多尺度融合特征图;
12.所述长短期记忆单元用于从多尺度融合特征图进一步提取潜在时序特征;
13.所述全连接网络用于根据深度特征图输出对gps轨迹的交通模式识别结果;
14.将gps轨迹的地理上下文特征图、gps轨迹的运动特征图融合作为深度多尺度交通模式识别模型urbtrans的输入,将深度多尺度交通模式识别模型urbtrans模型识别出的交通模式结果作为深度多尺度交通模式识别模型urbtrans的输出;
15.训练深度多尺度交通模式识别模型urbtrans,将训练好的该深度多尺度交通模式识别模型urbtrans作为gps轨迹交通模式识别模型;
16.深度多尺度交通模式识别模型urbtrans将输入gps轨迹段的交通模式识别为步行、自行车、公共交通、轿车中的一种;
17.根据本发明,步骤一所述地理信息为城市道路形状与坐标、城市道路等级、城市中公共设施站点坐标。
18.进一步地,步骤一所述gps轨迹与地理信息数据进行位置匹配由如下方式获得:
19.a)将城市区域划分为m行n列的网格系统:
20.grid={cell
0,0
,cell
1,1
……
cell
m
‑
1,n
‑1}.网格系统中的每个网格cell
i,j
均代表了一个地理区域;
21.b)将gps轨迹中的每个gps记录匹配到网格系统cell
i,j
的对应网格中。对于每个gps记录p
i
,其在网格系统grid中的位置x
i
和y
i
由下两式获得:
22.x
i
=(lat
i
‑
lat
min
)//m
23.y
i
=(lng
i
‑
lng
min
)//n
24.其中,lat
min
和lng
min
分别为网格系统grid中纬度和经度的最小值;lat
i
和lng
i
分别为gps记录p
i
的纬度值和经度值;
25.x
i
和y
i
定义为整数类型,为gps记录p
i
在网格系统grid中的坐标;
26.c)对于轨迹中的gps记录p
i
的道路等级特征,由通过其所属网格cell中的所有道路中等级最大者决定,由下式获得:
27.roadlevel
i
=level
x,y
,p
i
∈cell
x,y
28.其中,roadlevel
i
为gps记录p
i
的道路等级特征;
29.d)对于轨迹中gps记录p
i
的公共设施特征,由下式决定:
[0030][0031]
即对gps记录p
i
所属的网格cell中公共设施的存在性进行编码,bus
i
即为gps记录p
i
的公共设施特征。
[0032]
步骤一所述gps轨迹的地理上下文特征图为:gps轨迹中的每个gps记录p
i
被表示为sample
i
=[x
i
,y
i
,roadlevel
i
,bus
i
];每段轨迹被表示为6*n的张量,即为轨迹的地理信息上下文特征图。
[0033]
优选地,步骤二所述gps轨迹的运动特征图由如下方式获得:
[0034]
a)计算gps轨迹中gps记录p
i
与gps记录p
i 1
之间的距离d
i
,该距离由下式两式计算:
[0035][0036]
θ=sin(lat
i
)
×
sin(lat
i 1
)
×
cos(lng
i
‑
lng
i 1
) cos(lat
i
)
×
cos(lat
i 1
)
[0037]
b)由下式计算gps记录p
i
的速度s
i
:
[0038][0039]
c)由下式计算gps记录p
i
的加速度s
i
:
[0040][0041]
5.gps轨迹中的每个gps记录p
i
被表示为sample
i
=[s
i
,a
i
];每段轨迹被表示为2*n的张量,即为轨迹的运动特征图。
[0042]
进一步优选地,步骤三中的模型训练时的损失函数由下式计算:
[0043][0044]
其中,y
i
表示轨迹的真实标签,表示模型预测出的轨迹标签。
[0045]
上述融合地理上下文的深度多尺度交通模式识别模型urbtrans,其特征在于,包括如下步骤:
[0046]
步骤a,获取待识别gps轨迹所处城市区域的地理信息数据;
[0047]
步骤b,将gps轨迹与地理信息数据进行匹配,提取gps轨迹的地理信息上下文特征图;从原始gps轨迹中计算运动特征图;
[0048]
步骤c,将gps轨迹的地理信息上下文特征图与运动特征图输入到深度多尺度交通模式识别模型urbtrans,输出识别出的gps轨迹交通模式,该gps轨迹的交通模式为步行、自行车、公共交通、轿车中的一种。
[0049]
所述地理信息数据包括城市道路形状与坐标、城市道路等级、城市中公共设施站点坐标;所述运动特征包括gps轨迹的速度与加速度。
[0050]
本发明的融合地理上下文的深度多尺度交通模式识别模型urbtrans的建立和识别方法,融合了轨迹的地理上下文特征与轨迹自身的运动特征,将轨迹在城市区域中受到环境因素的复杂影响纳入了考虑中,同时使用了多尺度一维卷积模块和长短期记忆单元自动提取轨迹的多尺度潜在特征,进而提高了轨迹交通模式识别的准确性,并且在对短距离、短时间的轨迹识别上有进一步优势。与现有技术相比,带来的技术创新在于:
[0051]
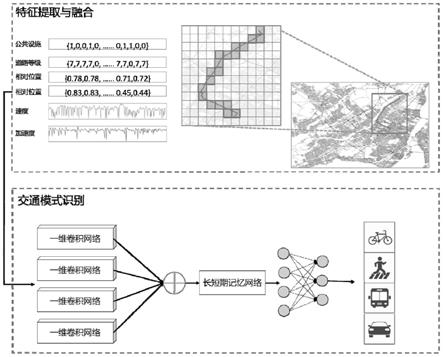
1、提出了一种新的轨迹特征提取方法来提取并融合异构特征,包括轨迹关联的地理上下文特征和轨迹本身的运动特征。地理上下文特征包括轨迹在城市区域中的相对位置、关联的公共设施以及所处道路级别;运动特征包括了从原始轨迹中统计出的速度与加速度。这些特征对识别轨迹的交通模式很有帮助,尤其是在识别短时间、短距离轨迹的任务上。
[0052]
2、提出了一种新的面向gps轨迹的交通模式识别模型,该交通模式识别模型使用多尺度一维卷积模块提取轨迹的潜在特征。该模块使用多个并行的、具有不同大小卷积核感受野的一维卷积网络,从复杂和不规则的gps轨迹中自动提取和融合多尺度潜在特征。
[0053]
3、提出了一种新的面向城市区域gps轨迹的交通模式识别模型,该模型使用长短
期记忆单元提取轨迹的时序潜在特征。gps轨迹是天然的时间序列数据,在多尺度一维卷积模块提取多尺度潜在特征后,模型使用长短期记忆单元进一步提取gps轨迹的时序潜在特征,以完成对gps轨迹的交通模式识别。
附图说明
[0054]
图1为深度多尺度交通模式识别模型urbtrans的模型结构图
[0055]
图2为实施例1中对geolife数据集轨迹与mtl数据集轨迹识别准确率与对比图。
[0056]
图3为实施例1中对geolife数据集不同gps记录数目的轨迹的识别准确率与对比图。
[0057]
图4为实施例1中对mtl数据集不同gps记录数目的轨迹的识别准确率与对比图。
[0058]
图5为实施例1中不同特征对geolife数据集轨迹与mtl数据集轨迹识别准确率对比图。
[0059]
图6为实施例1中模型不同模块对geolife数据集轨迹与mtl数据集轨迹识别准确率对比图。
[0060]
图7为实施例1中对geolife数据集中的一条轨迹的交通模式识别结果。
[0061]
下面结合附图和具体实施方式对本发明进行详细说明。
具体实施方式
[0062]
gps记录:gps记录是由gps传感器产生的记录,该记录主要包括三维特征,分别是纬度、经度、时间戳。纬度、经度表明了该记录产生的地理位置,时间戳表明了该记录产生的时间。gps记录在本实施例中以p
i
表示。
[0063]
gps轨迹:gps轨迹是由连续的gps记录组成的时间序列,记录了用户经过的一系列位置和时间。
[0064]
多尺度一维卷积模块:具有多个并行的、具有不同感受野大小的一维卷积网络(cnn)的模块,能够从gps轨迹特征图上提取并融合多尺度潜在特征。
[0065]
长短期记忆网络(lstm):用以提取时序特征的循环神经网络(rnn)具有梯度消失等问题,长短期记忆网络(lstm)解决了这一问题,在本模型中被用以提取轨迹的潜在时序特征。
[0066]
本实施例给出一种融合地理上下文的gps轨迹交通模式识别模型的建立方法,包括如下步骤:
[0067]
步骤1:获取城市区域的地理信息数据,将gps轨迹与地理信息数据进行位置匹配,获取gps轨迹的地理上下文特征图。
[0068]
步骤2:从原始gps轨迹中计算轨迹的速度、加速度,获取gps轨迹的运动特征图;
[0069]
步骤3:建立深度多尺度交通模式识别模型urbtrans,该深度多尺度交通模式识别模型urbtrans的组成包括并行的具有不同感受野大小的一维卷积网络、长短期记忆网络以及全连接网络;其中:
[0070]
所述并行的具有不同感受野大小的一维卷积网络,用于从gps轨迹的地理上下文特征图和gps轨迹的运动特征图提取不同尺度的深度特征并建立多尺度融合特征图;
[0071]
所述长短期记忆单元用于从多尺度融合特征图进一步提取潜在时序特征;
[0072]
所述全连接网络用于根据深度特征图输出对gps轨迹的交通模式识别结果;
[0073]
将gps轨迹的地理上下文特征图、gps轨迹的运动特征图融合作为深度多尺度交通模式识别模型urbtrans的输入,将深度多尺度交通模式识别模型urbtrans模型识别出的交通模式结果作为深度多尺度交通模式识别模型urbtrans的输出;
[0074]
训练深度多尺度交通模式识别模型urbtrans,将训练好的该深度多尺度交通模式识别模型urbtrans作为gps轨迹交通模式识别模型;
[0075]
深度多尺度交通模式识别模型urbtrans将输入gps轨迹段的交通模式识别为步行、自行车、公共交通、轿车中的一种;
[0076]
具体的,步骤一所述城市区域的地理信息数据包括道路网络坐标、道路网络等级、公共设施坐标。
[0077]
所述地理信息数据为从openstreetmap平台爬取到的城市区域范围内的道路网络数据,以图的形式存储,包括道路自身坐标数据以及道路交叉点的坐标数据。所述公共设施坐标从互联网获得,包括城市区域内公交车站等其他公共设施的地理坐标。
[0078]
具体的,对gps轨迹进行预处理并获取交通模式。
[0079]
步骤1中所述gps轨迹与地理信息数据进行位置匹配的方法如下:
[0080]
将城市区域划分为m行n列的网格系统:
[0081]
grid={cell
0,0
,cell
1,1
……
cell
m
‑
1,n
‑1}.网格系统中的每个网格cell
i,j
均代表了一个地理区域。
[0082]
将gps轨迹中的每个gps记录匹配到网格系统cell
i,j
的对应网格中。对于每个gps记录p
i
,其在网格系统grid中的位置x
i
和y
i
由式1和式2获得。
[0083]
x
i
=(lat
i
‑
lat
min
)//m
ꢀꢀ
式1
[0084]
y
i
=(lng
i
‑
lng
min
)//n
ꢀꢀ
式2
[0085]
其中,lat
min
和lng
min
分别为网格系统grid中纬度和经度的最小值。lat
i
和lng
i
分别为gps记录p
i
的纬度值和经度值。
[0086]
在本实施例中,x
i
和y
i
被定义为整数类型,为gps记录p
i
在网格系统grid中的坐标。
[0087]
对于轨迹中的gps记录p
i
的道路等级特征,由通过其所属网格cell中的所有道路中等级最大者决定,由式3获得:
[0088]
roadlevel
i
=level
x,y
,p
i
∈cell
x,y
ꢀꢀ
式3
[0089]
其中,roadlevel
i
为gps记录p
i
的道路等级特征。
[0090]
对于轨迹中gps记录p
i
的公共设施特征,由式4决定:
[0091][0092]
即对gps记录p
i
所属的网格cell中公共设施的存在性进行编码,bus
i
即为gps记录p
i
的公共设施特征。
[0093]
具体的,步骤1中所述gps轨迹的地理上下文特征图为:轨迹中的每个gps记录p
i
被表示为sample
i
=[x
i
,y
i
,roadlevel
i
,bus
i
].每段轨迹被表示为6*n的张量,即为轨迹的地理信息上下文特征图。
[0094]
具体的,步骤2中所述gps轨迹的运动特征图由如下方式获得:
[0095]
计算gps轨迹中gps记录p
i
与gps记录p
i 1
之间的距离d
i
,该距离由式5和式6计算:
[0096][0097]
θ=sin(lat
i
)
×
sin(lat
i 1
)
×
cos(lng
i
‑
lng
i 1
) cos(lat
i
)
×
cos(lat
i 1
)
ꢀꢀ
式6
[0098]
计算gps记录p
i
的速度s
i
,该值由式7计算:
[0099][0100]
计算gps记录p
i
的加速度a
i
,该值由式8计算:
[0101][0102]
具体的,步骤2中所述gps轨迹的运动特征图的表示形式为:轨迹中的每个gps记录p
i
被表示为sample
i
=[s
i
,a
i
].每段轨迹被表示为2*n的张量,即为轨迹的运动特征图。
[0103]
具体的,步骤3中所述的深度多尺度学习模型urbtrans主要由多尺度一维卷积模块、长短期记忆单元组成,其模型结构如图1所示。多尺度一维卷积模块由并行的、具有不同大小卷积核感受野的一维卷积网络组成。其作用在于从复杂的gps轨迹中提取多尺度的潜在特征。在本实施例中,4个一维卷积网络被用于提取多尺度特征。对于单一的一维卷积网络,其形式如式9所示:
[0104][0105]
其中,l是一维卷积层的编号,p表示接受大小,u是层中单元的阶数,w是可训练权重参数,是激活函数。为了提取多尺度潜在特征,4个一维卷积层的p值大小分别为2、3、5、7。
[0106]
对于4个一维卷积网络提取的不同尺度深度特征,使用一个融合层将它们进行融合,融合过程如式10所示:
[0107][0108]
其中,featuremap
i
代表第i个一维卷积网络提取的潜在特征图,代表连接符号,将所有潜在特征图在通道维度上进行连接,代表激活函数,fusion代表融合后的多尺度深度特征图。
[0109]
具体的,步骤3中所述的深度多尺度学习模型urbtrans的时间特征提取模块为长短期记忆单元,其形式如式11所示:
[0110]
h
t
=o
t
tanh(c
t
)
ꢀꢀ
式11
[0111]
其中,f
t
=sigmoid(w
f
·
[h
t
‑1,x
t
] b
f
),i
t
=sigmoid(w
i
·
[h
t
‑1,x
t
] b
i
),o
t
=sigmoid(w
o
·
[h
t
‑1,x
t
] b
o
),其中f
t
为遗忘门的状态,i
t
为记忆门状态,o
t
为输出门状态。c
t
=f
t
×
c
t
‑1 i
t
×
tanh(w
c
·
[h
t
‑1,x
t
] b
c
),c
t
为中间单元的状态。w
f
、w
i
、w
o
分别表示对应参数的权重,b
f
、b
i
、b
o
分别表示对应参数的偏置。sigmoid和tanh表示激活函数。具体的,本发明中的长短期记忆网络的隐藏神经元数量被设置为64个。
[0112]
具体的,步骤3中所述的训练模型的过程中,损失函数由式12计算:
[0113][0114]
其中,y
i
表示轨迹的真实标签,表示模型预测出的轨迹标签。
[0115]
本实施例还给出了上述所建立的融合地理上下文的gps轨迹交通模式识别模型的识别方法,包括如下步骤:
[0116]
步骤1:获取城市区域的地理信息数据,将gps轨迹与这些地理信息数据进行位置匹配,获取gps轨迹的地理上下文特征图。
[0117]
步骤2:从原始gps轨迹中计算轨迹的运动特征,获取gps轨迹的运动特征图。
[0118]
步骤3:将gps轨迹的地理上下文特征、运动特征图融合作为训练好的深度多尺度交通模式识别模型urbtrans的输入,深度多尺度交通模式识别模型urbtrans将输出预测出的该gps轨迹的交通模式。模型将输入gps轨迹段的交通模式识别为步行、自行车、公共交通、轿车中的一种。
[0119]
以下是发明人给出的具体实验的例子。
[0120]
实验例1:
[0121]
本实验例中对geolife轨迹数据集和mtl轨迹数据集进行交通模式识别实验。geolife数据集包括182名用户的高采样率gps轨迹数据,由微软亚洲研究院从2007年8月到2012年8月采集,其中有73名用户为他们的轨迹标注了交通模式。mtl数据集包括4425名用户的高采样率gps轨迹数据,由加拿大蒙特利尔市从2017年9月到10月收集,其中大约三分之一的轨迹数据有交通模式标注。实施例中的地理信息数据从openstreetmap爬取的,包括北京市(39.75,116.15)到(40.1,116.6)之间的道路网络数据,包括道路网络的形状、地理坐标、道路等级;包括蒙特利尔市(
‑
73.942,45.415)到(
‑
73.479,45.701)之间的道路网络数据,包括道路网络的形状、地理坐标、道路等级。
[0122]
在本实验例中,与其他gps轨迹交通模式识别模型对比,本实施例提出的深度多尺度交通模式识别模型urbtrans在识别gps轨迹的交通模式上具有更高的识别精度。如图2左侧直方图所示,在识别geolife数据集中由200个gps记录组成的轨迹段时,采用本实施例提出的深度多尺度交通模式识别模型urbtrans及其识别方法,其分类准确率达到了85.73%,比基线方法cnn,image
‑
dnn,knn,svm,dt,tf,gbdt和xgboost至少提高了5%。如图2右侧直方图所示,在识别mtl数据集中由60个gps记录组成的轨迹段时,本实施例提出的深度多尺度交通模式识别模型urbtrans及其识别方法的分类准确率达到了85.41%,比基线方法cnn,image
‑
dnn,knn,svm,dt,tf,gbdt和xgboost至少提高了7%。
[0123]
在本实施例中,为了进一步证明本方法在少量gps记录组成的轨迹上的识别性能,发明人分别在两个数据集上使用不同数量gps记录组成的轨迹段进行识别。对于geolife数据集,gps轨迹段中的gps记录数量为(15,20,30,40,60,90,120,200),对于mtl数据集,gps轨迹段中的gps记录数量为(20,30,40,50,,60)。如图3所示,在geolife数据集的实验上,本方法在只有15个gps记录时,就能达到78.10%的准确率,比其他方法高出至少5%。如图4所示,在mtl数据集的实验上,本发明方法在只有20个gps记录时,就能达到82.43%的准确率,同样比其他方法至少高出5%。并且,总体来说,本发明在组成轨迹段的gps记录数量更少时相较于其他方法具有更高的准确率提升。这证明本发明在识别短距离、短时间的gps轨迹上具有优异的性能。
[0124]
在本实施例中,为了进一步本发明中使用各特征对交通模式识别任务的贡献,比较了使用不同特征组合时的识别准确率。如图5所示,模型分别使用速度、运动特征(速度 加速度)、运动特征 公共设施、运动特征 道路等级、运动特征 相对位置,以及运动特征 地理上下文特征(相对位置 道路等级 公共设施)这些特征组合进行轨迹交通模式识别。如图所示,结果表明,运动特征 地理上下文特征具有最高的精度。此外,地理上下文的特征,如公共设施、道路等级、相对位置都会对交通模式识别带来一些改进。在geolife数据集上,与仅使用运动特征(速度 加速度)相比,使用运动特征 地理上下文特征进行识别将精确度提高了0.2%到1.2%。类似地,在mtl数据集上,使用运动特征 地理上下文特征进行识别的经度带来了从0.8%到2.3%不等的准确率提升。
[0125]
在本实施例中,为了进一步证明本发明提出的深度多尺度交通模式识别模型urbtrans中各模块的有效性,通过消融实验对深度多尺度交通模式识别模型urbtrans中的各模块进行评估。首先,去除多尺度一维卷积层,只保留了一个一维卷积网络。这种变体模型称为urbtrans
‑
scnn。其次,将模型中的长短期记忆网络替换为全连接网络,以消除挖掘时间特征的能力。urbtrans的这种变体模型称为urbtrans
‑
nt。我们在具有200个gps记录的geolife数据集轨迹段和具有60个gps读数的mtl数据集轨迹段上训练和测试这两个变体方法的交通模式识别能力,并将其精度与原始模型进行比较。如图6所示,多尺度一维卷积模块和长短期记忆单元都有助于增加交通模式识别的准确性,分别在geolife数据集轨迹段和mtl数据集轨迹段上提升了2%到3%的准确率。
[0126]
在本实施例中,将训练好的深度多尺度交通模式识别模型urbtrans对geolife数据集中的一条特定轨迹进行识别,并可视化其交通模式识别结果。如图7所示,用户选择步行和轿车的轨迹段均被准确识别。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。