技术特征:
1.一种磁跟踪系统,用于确定在所述磁跟踪系统的环境中的被跟踪对象的对象姿态,所述磁跟踪系统包括:磁跟踪设备,其包括:非磁信号检测器,其被配置为测量所述环境中的非磁信号;以及磁信号检测器,其被配置为测量所述环境中的磁信号,所述磁信号检测器耦合到所述非磁信号检测器;计算设备,其被配置为执行包括以下各项操作:接收针对所述环境中的所述磁跟踪设备的位置的所述非磁信号的测量和所述磁信号的对应测量;基于所述非磁信号的测量来针对所述位置估计在所述环境中的所述磁跟踪设备的非磁姿态,基于所述磁信号的测量来针对所述位置估计在所述环境中的所述磁跟踪设备的磁姿态,确定针对所述位置的磁姿态估计与非磁姿态估计之间的差异;基于所述差异来确定针对所述位置的磁畸变校正值;生成包括所述磁畸变校正值的畸变校正模型;以及输出所述畸变校正模型的表示。2.根据权利要求1所述的磁跟踪系统,其中,所述非磁信号是使用标记生成的,并且其中,所述非磁信号检测器包括相机。3.根据权利要求2所述的磁跟踪系统,其中,所述标记包括外形,所述外形不同于所述环境中的多个标记中的其他标记的其他外形。4.根据权利要求2所述的磁跟踪系统,其中,所述标记包括粘合剂,所述粘合剂被配置为将所述标记能够移除地附接到所述环境中的另一表面。5.根据权利要求2所述的磁跟踪系统,其中,所述标记包括红外回射器,并且其中,所述非磁信号检测器包括红外源。6.根据权利要求1所述的磁跟踪系统,其中,所述非磁信号包括aruco图案、charuco图案、光源、超声波源、无线电信号源或发射机组装件的外形中的一个。7.根据权利要求1所述的磁跟踪系统,其中,所述磁信号由发射机组装件生成,所述发射机组装件包括:存储器,其被配置为存储与所述发射机组装件相关的校准数据;处理设备,其被配置为控制所述磁信号从所述发射机组装件的发射;通信接口,其用于发送数据和从所述计算设备接收数据;以及电源,其被配置为向所述存储器、所述处理设备和所述通信接口提供电功率。8.根据权利要求1所述的磁跟踪系统,其中,所述操作还包括:通过执行包括以下各项的操作来跟踪被跟踪对象:接收在所述环境中的特定位置处的所述磁信号的测量;从与所述计算设备通信的存储器中取回所述畸变校正模型;确定针对所述被跟踪对象的特定姿态估计;基于与所述特定位置相对应的所述畸变校正模型的值来校正所述特定姿态估计;以及
输出经校正的特定姿态估计的表示。9.根据权利要求8所述的磁跟踪系统,其中,所述被跟踪对象包括导管、内窥镜或手术器械中的一个。10.根据权利要求1所述的磁跟踪系统,其中,所述操作还包括:接收与所述环境的平面表面相对应的所述磁信号的多个测量,所述平面表面与定位在所述环境中的已知位置处的支架相关联;对于所述磁信号的所述多个测量中的每个测量,取回与所述环境中的测量的位置相关联的预定校正值;确定针对每个测量的畸变校正值;以及将针对每个测量的所述畸变校正值包括在所述畸变校正模型中。11.一种用于确定在磁跟踪系统的环境中的被跟踪对象的对象姿态的方法,所述方法包括:通过非磁信号检测器测量所述环境中的非磁信号;通过磁信号检测器测量所述环境中的磁信号,其中,所述磁信号检测器耦合到所述非磁信号检测器;接收针对所述环境中的磁跟踪设备的位置的所述非磁信号的测量和所述磁信号的对应测量;基于所述非磁信号的测量来针对所述位置估计在所述环境中的所述磁跟踪设备的非磁姿态;基于所述磁信号的测量来针对所述位置估计在所述环境中的所述磁跟踪设备的磁姿态;确定针对所述位置的磁姿态估计与非磁姿态估计之间的差异;基于所述差异来确定针对所述位置的磁畸变校正值;生成包括所述畸变值的畸变校正模型;以及输出所述畸变校正模型的表示。12.根据权利要求11所述的方法,其中,所述非磁信号是使用视觉标记生成的,并且其中,所述非磁信号检测器包括相机。13.根据权利要求12所述的方法,其中,所述标记包括发射机组装件的外形,所述外形不同于所述环境中的多个标记中的其他标记的其他外形。14.根据权利要求12所述的方法,其中,所述标记包括粘合剂,所述粘合剂被配置为将所述标记能够移除地附接到所述环境中的另一表面。15.根据权利要求12所述的方法,其中,所述标记包括红外回射器,并且其中,所述非磁信号检测器包括红外源。16.根据权利要求11所述的方法,其中,所述非磁信号包括aruco图案、charuco图案、光源、超声波源、无线电信号源或发射机组装件的外形中的一个。17.根据权利要求11所述的方法,其中,所述磁信号由发射机组装件通过以下操作生成:存储与所述发射机组装件相关的校准数据;以及基于所述校准数据来控制所述磁信号从所述发射机组装件的发射。
18.根据权利要求11所述的方法,还包括:通过执行包括以下各项的操作来跟踪被跟踪对象:接收在所述环境中的特定位置处的所述磁信号的测量;从存储器设备中取回所述畸变校正模型;确定针对所述被跟踪对象的特定姿态估计;基于与所述特定位置相对应的所述畸变校正模型的值来校正所述特定姿态估计;以及输出经校正的特定姿态估计的表示。19.根据权利要求18所述的方法,其中,所述被跟踪对象包括导管、内窥镜或手术器械中的一个。20.根据权利要求11所述的方法,还包括:接收与所述环境的平面表面相对应的所述磁信号的多个测量,所述平面表面与定位在所述环境中的已知位置处的支架相关联;对于所述磁信号的所述多个测量中的每个测量,取回与所述环境中的测量的位置相关联的预定校正值;确定针对每个测量的畸变校正值;以及将针对每个测量的所述畸变校正值包括在所述畸变校正模型中。
技术总结
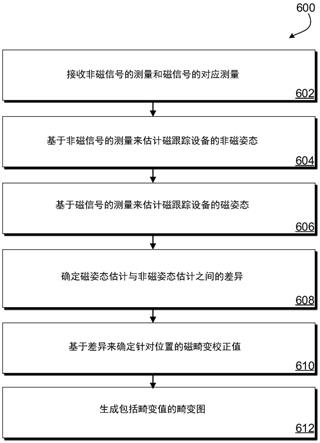
磁跟踪设备被配置为通过接收针对环境中的磁跟踪设备的位置的非磁信号的测量和磁信号的对应测量来跟踪环境中的对象。磁跟踪设备基于非磁信号的测量来针对该位置估计在环境中的磁跟踪设备的非磁姿态。该设备基于磁信号的测量来针对该位置估计在环境中的磁跟踪设备的磁姿态。该设备确定针对该位置的磁姿态估计与非磁姿态估计之间的差异。该设备基于该差异来确定针对该位置的磁畸变校正值。磁跟踪设备生成包括畸变值的畸变校正模型,并且输出畸变校正模型的表示。变校正模型的表示。变校正模型的表示。
技术研发人员:马克
受保护的技术使用者:阿森松技术公司
技术研发日:2021.06.11
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。