一种astar快速路径规划改进算法
技术领域
1.本发明涉及自动路径规划领域,具体为一种astar快速路径规划改进算法。
背景技术:
2.路径规划在越来越多的应用场景得到越来越广泛的运用。他是现代人工智能和自动化处理的一个重要分支,在军用和民用领域得到越来越多的应用,并取得了较为长足的发展。由于应用的不断拓展,在执行效率方面的要求也越来越凸显,如何在算法准确性和运行效率的矛盾中得到一个合理的可接受的解决方案就成了各个应用场景的紧迫需求。本发明改进正是针对目前的各种应用需求提出的一种有效的解决方法。
技术实现要素:
3.本发明目的在于提供一种astar快速路径规划改进算法,本发明改进astar原始算法的启发式地图路点搜索模式为矢量路网数据和网格分割并辅以权重的方式,极大的减少了搜索数据集的范围和数量,同时通过网格分割的方式进一步减小了搜索范围,再辅以权重的方式,得到比原始astar算法更为合理的路线规划。
4.为达成上述目的,本发明提出如下技术方案:一种astar快速路径规划改进算法,包括如下步骤:
5.步骤一:解析矢量路网数据,将目标地图的矢量路网信息加载到系统中并进行数据处理得到数据一,数据一存放于系统中,供后续查询和计算算法使用;
6.步骤二:数据网格化处理,将数据一进行分割得到数据二,并存放于系统中,供后续查询和计算算法使用;
7.步骤三:权重信息处理,根据辅助的权重数据对数据二进行权重信息处理得到数据三,并存放于系统中,供后续查询和计算算法使用;
8.步骤四:数据处理,接收外部输入路点信息,定位出输入路点最近的矢量网络路点作为修正的输入,并使用数据三,利用改进的astar算法进行快速路径规划并返回处理结果,具体的算法公式如下:
9.f(n)=g(n) h(n);
10.f(n)为下一个最佳的点,其中g(n)表示从起点到节点n的真实距离;h(n)表示通过启发函数估计的节点n到终点的距离,h(n)的计算加入了权重信息处理,因此其实际的意义是带权重条件下的估计距离,h(n)的具体算法公式如下:
11.h(n)=t(n) d(n) p(n);
12.其中t(n)是从节点n到终点的时间权重估值;d(n)是从节点n到终点的距离权重估值;p(n)是从节点n到终点的其他可用的参考权重估值,其中t(n)、d(n)、p(n)至少要有一项有意义。
13.进一步的,在本发明中,步骤一中得到数据一的具体过程,包括系统加载矢量网路数据,导入成功后解析矢量网路数据,重组管理矢量网路数据得到数据一。
14.进一步的,在本发明中,步骤二中得到数据二的具体过程,加载网格化处理配置信息,加载成功后根据配置进行网格化处理,处理后数据放入管理器得到数据二,加载失败返回失败信息并结束。
15.进一步的,在本发明中,步骤三中得到数据三的具体过程,加重权重配置信息,加载成功后将各个权重信息按照指定方式配置到矢量路网各个路点上得到数据三,加载失败返回失败信息并结束。
16.进一步的,在本发明中,步骤四中,数据处理流程如下,接收输入参数,判定输入参数的最近路网点,有效路网点≥2,调用改进astar算法计算路网路径,路径存在返回有效路径信息,路径不存在则返回失败标识并结束,有效路网点<2,返回错误标识并结束。
17.进一步的,在本发明中,数据综合处理流程,加载数据综合处理配置信息,加载成功后将网格化数据信息融入矢量路网信息,权重信息融入矢量路网信息,路网信息统计并放入管理器,加载失败返回失败信息并结束。
18.一种电子设备,包括存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行上述一种astar快速路径规划改进算法。
19.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使所述计算机执行上述一种astar快速路径规划改进算法。
20.有益效果,本技术的技术方案具备如下技术效果:
21.本发明改进astar原始算法的启发式地图路点搜索模式为矢量路网数据和网格分割并辅以权重的方式,极大的减少了搜索数据集的范围和数量,同时通过网格分割的方式进一步减小了搜索范围,再辅以权重的方式,得到比原始astar算法更为合理的路线规划。通过本算法可以快速准确的获得规划路径并得到正确的路网路点顺序,引导相关目标按照规划路径通过地图区域。本方法采用的区域分割法和矢量路网数据进行优化后,极大的提高了astar算法的执行效率。
22.应当理解,前述构思以及在下面更加详细地描述的额外构思的所有组合只要在这样的构思不相互矛盾的情况下都可以被视为本公开的发明主题的一部分。
23.结合附图从下面的描述中可以更加全面地理解本发明教导的前述和其他方面、实施例和特征。本发明的其他附加方面例如示例性实施方式的特征和/或有益效果将在下面的描述中显见,或通过根据本发明教导的具体实施方式的实践中得知。
附图说明
24.附图不意在按比例绘制。在附图中,在各个图中示出的每个相同或近似相同的组成部分可以用相同的标号表示。为了清晰起见,在每个图中,并非每个组成部分均被标记。现在,将通过例子并参考附图来描述本发明的各个方面的实施例,其中:
25.图1为本发明流程示意图。
26.图2为本发明解析矢量路网数据流程示意图。
27.图3为本发明数据网格化处理流程示意图。
28.图4为本发明权重信息处理流程示意图。
29.图5为本发明数据处理流程示意图。
30.图6为本发明数据综合处理流程示意图。
具体实施方式
31.为了更了解本发明的技术内容,特举具体实施例并配合所附图式说明如下。在本公开中参照附图来描述本发明的各方面,附图中示出了许多说明的实施例。本公开的实施例不必定义在包括本发明的所有方面。应当理解,上面介绍的多种构思和实施例,以及下面更加详细地描述的那些构思和实施方式可以以很多方式中任意一种来实施,这是因为本发明所公开的构思和实施例并不限于任何实施方式。另外,本发明公开的一些方面可以单独使用,或者与本发明公开的其他方面的任何适当组合来使用。
32.本实施例提供一种astar快速路径规划改进算法,包括如下步骤,
33.步骤一:解析矢量路网数据,将目标地图的矢量路网信息加载到系统中并进行数据处理得到数据一,数据一存放于系统中,供后续查询和计算算法使用;
34.步骤二:数据网格化处理,将数据一进行分割得到数据二,并存放于系统中,供后续查询和计算算法使用;
35.步骤三:权重信息处理,根据辅助的权重数据对数据二进行权重信息处理得到数据三,并存放于系统中,供后续查询和计算算法使用;
36.步骤四:数据处理,接收外部输入路点信息,定位出输入路点最近的矢量网络路点作为修正的输入,并使用数据三,利用改进的astar算法进行快速路径规划并返回处理结果,具体的算法公式如下:
37.f(n)=g(n) h(n);
38.f(n)为下一个最佳的点,其中g(n)表示从起点到节点n的真实距离;h(n)表示通过启发函数估计的节点n到终点的距离,h(n)的计算加入了权重信息处理,因此其实际的意义是带权重条件下的估计距离,h(n)的具体算法公式如下:
39.h(n)=t(n) d(n) p(n);
40.其中t(n)是从节点n到终点的时间权重估值;d(n)是从节点n到终点的距离权重估值;p(n)是从节点n到终点的其他可用的参考权重估值,其中t(n)、d(n)、p(n)至少要有一项有意义。
41.进一步的,在本发明中,得到步骤一中得到数据一的具体过程,包括系统加载矢量网路数据,导入成功后解析矢量网路数据,重组管理矢量网路数据得到数据一。
42.进一步的,在本发明中,步骤二中得到数据二的具体过程,加载网格化处理配置信息,加载成功后根据配置进行网格化处理,处理后数据放入管理器得到数据二,加载失败返回失败信息并结束。
43.进一步的,在本发明中,步骤三中得到数据三的具体过程,加重权重配置信息,加载成功后将各个权重信息按照指定方式配置到矢量路网各个路点上得到数据三,加载失败返回失败信息并结束。
44.进一步的,在本发明中,步骤四中,数据处理流程如下,接收输入参数,判定输入参数的最近路网点,有效路网点≥2,调用改进astar算法计算路网路径,路径存在返回有效路径信息,路径不存在则返回失败标识并结束,有效路网点<2,返回错误标识并结束。
45.进一步的,在本发明中,数据综合处理流程,加载数据综合处理配置信息,加载成
功后将网格化数据信息融入矢量路网信息,权重信息融入矢量路网信息,路网信息统计并放入管理器,加载失败返回失败信息并结束。
46.本发明的核心数据结构如下:
47.1.路点信息结构
48.//路点关系结构定义
49.typedef struct roadpointrelationship
50.{
51.pointinfo*ptinfo;
52.bool reachable;//是否允许到达
53.}roadpointrelationship;
54.roadpointrelationship结构中的reachable用于标志ptinfo指向的路点与关联路点的可到达性,用于有向路径规划。
55.roadpointrelationship结构中的ptinfo是与关联路点相关的路点信息结构指针,reachable描述的就是它与关联路点的到达关系。
56.//有向图坐标及相关信息结构
57.typedef struct pointinfo
58.{
59.std::vector<pointinfo*>parentpts;
60.std::vector<pointinfo*>childrenpts;
61.std::vector<roadpointrelationship>ptrelationship;
62.double lat;
63.double lon;
64.}pointinfo;
65.pointinfo结构中的ptrelationship用于保存与自身直接连接的路点的通行状态,这个成员仅在有向路径规划时使用。
66.pointinfo结构中的parentpts存放当前路点的父级路点,此处的父只是一个相对概念,并非绝对不可变的。
67.pointinfo结构中的childrenpts存放当前路点的子级路点,此处的子只是一个相对概念,并非绝对不可变的。
68.pointinfo结构中的lon是当前路点的经度坐标信息。
69.pointinfo结构中的lat是当前路点的纬度坐标信息。
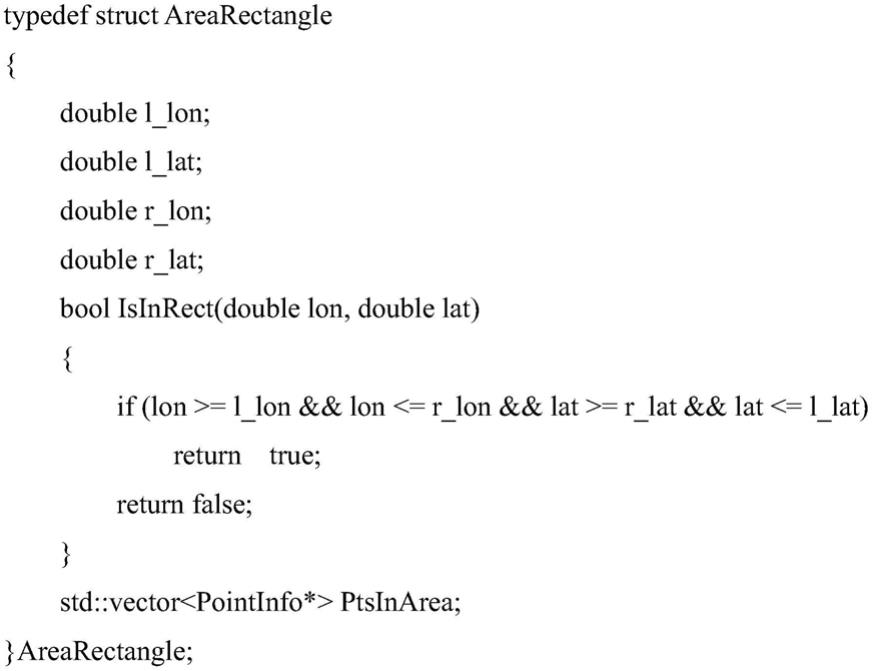
70.2.网格信息结构
[0071][0072]
arearectangle结构中的l_lon表示左上角经度坐标信息,l_lat表示左上角纬度坐标信息,r_lon表示右下角经度坐标信息,r_lat表示右下角纬度坐标信息。
[0073]
arearectangle结构中的ptsinarea存放所有处于此网格范围内的点的信息。
[0074]
arearectangle结构中的isinrect函数用于判断指定的坐标点是否归属于此网格范围内部。
[0075]
3.矢量路网信息路线结构
[0076]
//有向图线段及相关信息结构
[0077]
typedef struct lineinfo
[0078]
{
[0079]
pointinfo*begin;
[0080]
pointinfo*end;
[0081]
bool onewayflag;//单行道
[0082]
std::vector<pointinfo*>roadpts;
[0083]
std::vector<double>pointdistance;//f
[0084]
}lineinfo;
[0085]
lineinfo结构中的begin存放的是路线的起始端路点信息指针。
[0086]
lineinfo结构中的end存放的是路线的结束端路点信息指针。
[0087]
lineinfo结构中的onewayflag用于标志该路段是否为单行道。
[0088]
lineinfo结构中的roadpts存放路段中的所有路点信息;
[0089]
lineinfo结构中的pointdistance存放路段中前后两点间的距离信息。
[0090]
本发明的另一个实施例公开一种电子设备,包括存储器和处理器,所述存储器和
所述处理器之间互相通信连接,例如通过总线或者其他方式连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行所述一种astar快速路径规划改进算法。
[0091]
处理器优选但不限于是中央处理器(central processing unit,cpu)。例如,处理器还可以为其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现场可编程门阵列(fieldprogrammable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等芯片,或者上述各类芯片的组合。存储器作为一种非暂态计算机可读存储介质,可用于存储非暂态软件程序、非暂态计算机可执行程序以及模块,如本发明实施例中的一种astar快速路径规划改进算法对应的程序指令/模块,处理器通过运行存储在存储器的非暂态软件程序、指令以及模块,从而执行处理器的各种功能应用以及数据处理,即实现上述方法实施例中的一种astar快速路径规划改进算法。
[0092]
存储器可以包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需要的应用程序;存储数据区可存储处理器所创建的数据等。此外,存储器优选但不限于高速随机存取存储器,例如,还可以是非暂态存储器,例如至少一个磁盘存储器件、闪存器件、或其他非暂态固态存储器件。在一些实施例中,存储器还可选包括相对于处理器远程设置的存储器,这些远程存储器可以通过网络连接至处理器。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。本领域技术人员可以理解,实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成的程序,可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,存储介质可为磁碟、光盘、只读存储记忆体(read
‑
only memory,rom)、随机存储记忆体(random access memory,ram)、快闪存储器(flash memory)、硬盘(hard disk drive,缩写:hdd)或固态硬盘(solid
‑
statedrive,ssd)等;存储介质还可以包括上述种类的存储器的组合。
[0093]
虽然本发明已以较佳实施例揭露如上,然其并非用以限定本发明。本发明所属技术领域中具有通常知识者,在不脱离本发明的精神和范围内,当可作各种的更动与润饰。因此,本发明的保护范围当视权利要求书所界定者为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。