1.本发明涉及风电齿轮箱柔性销行星传动齿轮的技术领域,尤其是指一种风电齿轮箱柔性销行星传动齿轮修形校核方法及系统。
背景技术:
2.业内习知,超紧凑半直驱风电齿轮箱采用了柔性销行星传动齿轮,内齿圈固定在箱体上,柔性轴与行星架过盈配合,柔性轴悬空支撑,销套与柔性轴过盈配合组合成柔性销,销套悬空支撑,从而由柔性轴和销套形成了双悬臂支撑结构,行星轮通过轴承固定在销套上,行星轮与内齿圈的啮合为内啮合,行星轮与太阳轮的啮合为外啮合。双悬臂支撑可以使每个行星轮平行移动,进而使载荷在行星轮之间及行星轮齿宽之间平均分配。
3.齿轮修形是齿轮设计过程中重要的一环,包括齿高方向的齿顶修形及齿宽方向的齿向修形,每种修形又有多种形式。
4.由于对柔性销及其加工制造的了解不同、变载工况的处理不同、修形方式选择及修形载荷计算的不同,同一行星传动齿轮有诸多修形方式,并且不同的设计制造供应商的修形结果也不相同。实际测试中有的修形方法表现的结果相差很远,需要多次修改,降低产品研发效率,而且无规律的修形方法不容易总结经验、无法找到最佳的修形方法,因此,有必要针对柔性销行星传动齿轮建立一套规范、可靠、效率高的修形方法。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提供一种规范、可靠、效率高的风电齿轮箱柔性销行星传动齿轮修形校核方法及系统,提高齿轮箱的研发效率及可靠性,提高风电机组设计的研发效率及可靠性。
6.为实现上述目的,本发明所提供的技术方案为:一种风电齿轮箱柔性销行星传动齿轮修形校核方法,包括:
7.利用ldd载荷谱进行等效扭矩计算,进而根据等效扭矩计算出修形作用力;
8.根据修形作用力结合行星传动齿轮的基本参数分别计算出行星传动齿轮的太阳轮和行星轮齿向修形校核的螺旋修形量和倒坡修形量,进而根据螺旋修形量对太阳轮进行螺旋修形,根据倒坡修形量对行星轮的内齿和外齿分别进行倒坡修形,根据行星轮螺旋线总偏差对行星轮的内齿和外齿分别进行鼓形修形;
9.根据修形作用力结合行星传动齿轮的基本参数分别计算出在行星传动齿轮啮合过程中,其太阳轮、内齿圈和行星轮在齿高方向上的变形量,进而将变形量作为齿顶修形量分别对太阳轮、内齿圈和行星轮进行齿顶修形。
10.进一步,所述利用ldd载荷谱进行等效扭矩计算,进而根据等效扭矩计算出修形作用力的具体情况如下:
11.利用ldd载荷谱计算出等效扭矩m
eq
:
[0012][0013]
式中,m
i
为ldd载荷谱中每个工况的扭矩载荷,n
i
为ldd载荷谱中每个工况的循环次数,i为载荷谱工况的次数;
[0014]
通过等效扭矩m
eq
求出修形作用力f
t
:
[0015]
f
t
=0.5
×
m
eq
/a/s
[0016]
式中,a为柔性销行星传动中心距,即柔性销与太阳轮的中心距离,s为行星轮数量。
[0017]
进一步,所述根据修形作用力结合行星传动齿轮的基本参数分别计算出行星传动齿轮的太阳轮和行星轮齿向修形校核的螺旋修形量和倒坡修形量,进而根据螺旋修形量对太阳轮进行螺旋修形,根据倒坡修形量对行星轮的内齿和外齿分别进行倒坡修形,根据行星轮螺旋线总偏差对行星轮的内齿和外齿分别进行鼓形修形的具体情况如下:
[0018]
根据修形作用力f
t
求出太阳轮扭转变形量,作为太阳轮的螺旋修形量δ1:
[0019][0020]
式中,y=d
空
/d1,d
空
为太阳轮内腔直径,d1为太阳轮分度圆直径,b为行星轮的齿宽,s为行星轮数量;
[0021]
根据修形作用力f
t
求出行星轮的倒坡修形量δ2:
[0022]
δ2=f
t
/b/20000
[0023]
倒坡修形的长度根据行星轮齿宽上应力集中现象的长度决定;
[0024]
所述行星轮螺旋线总偏差是结合行星轮的参数及精度等级,根据gb/t10095.1
‑
2001标准查询得到。
[0025]
进一步,倒坡修形的长度l=b
×
10%。
[0026]
进一步,所述根据修形作用力结合行星传动齿轮的基本参数分别计算出在行星传动齿轮啮合过程中,其太阳轮、内齿圈和行星轮在齿高方向上的变形量,进而将变形量作为齿顶修形量的具体情况如下:
[0027]
1)根据修形作用力f
t
计算太阳轮在啮合过程中齿高方向的变形量,将变形量作为太阳轮的齿顶修形量δ3:
[0028]
δ3=f
t
/b/12500
[0029]
式中,b为行星轮的齿宽;
[0030]
所述太阳轮的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:
[0031]
根据行星传动齿轮的基本参数计算太阳轮的基圆直径:d
b1
=z1×
m
×
cos(α)
[0032]
式中,z1为太阳轮齿数,m为模数,α为齿形角;
[0033]
根据行星传动齿轮的基本参数计算行星轮基圆直径:d
b2
=z2×
m
×
cos(α)
[0034]
式中,z2为行星轮齿数,m为模数,α为齿形角;
[0035]
太阳轮和行星轮未变位时的中心距:a1=0.5m
×
(z1 z2)
[0036]
太阳轮与行星轮啮合时的啮合角:α1=acos[a1/a
×
cos(α)]
[0037]
式中,a为柔性销行星传动中心距;
[0038]
根据啮合角α1计算太阳轮与行星轮啮合时的极限点长度n1n2:
[0039]
n1n2=0.5
×
d
b1
×
tan(α1) 0.5
×
d
b2
×
tan(α1)
[0040]
根据极限点长度n1n2计算太阳轮与行星轮啮合时的啮合线长度l
ae
:
[0041][0042]
式中,d
a1
为太阳轮齿顶圆直径,d
a2
为行星轮齿顶圆直径;
[0043]
太阳轮与行星轮啮合时的基节长度l
b
为:
[0044]
l
b
=π
×
m
×
cos(α)
[0045]
太阳轮齿顶修形终止点的直径d
d1
为:
[0046][0047][0048]
j1=l
ae
‑
l
b
[0049]
式中,k1、j1均为过渡参数;
[0050]
2)根据修形作用力f
t
计算内齿圈在啮合过程中齿高方向的变形量,将变形量作为内齿圈的齿顶修形量δ4:
[0051]
δ4=f
t
/b/12500
[0052]
所述内齿圈的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:
[0053]
根据行星传动齿轮的基本参数计算内齿圈基圆直径:d
b3
=z3×
m
×
cos(α)
[0054]
式中,z3为内齿圈齿数,m为齿轮模数,α为齿形角;
[0055]
行星轮的基圆直径:d
b2
=z2×
m
×
cos(α)
[0056]
内齿圈和行星轮未变位时的中心距:a2=0.5m
×
(z3‑
z2)
[0057]
內齿圈与行星轮啮合时的啮合角α2为:α2=acos[a2/a
×
cos(α)]
[0058]
式中,a为柔性销行星传动中心距;
[0059]
根据啮合角α2计算內齿圈与行星轮啮合的极限点长度n3n2:
[0060]
n3n2=0.5
×
d
b3
×
tan(α2)
‑
0.5
×
d
b2
×
tan(α2)
[0061]
根据极限点长度n3n2计算內齿圈与行星轮啮合时的啮合线长度l
sr
:
[0062][0063]
式中,d
a3
为内齿圈齿顶圆直径,d
a2
为行星轮齿顶圆直径;
[0064]
內齿圈与行星轮啮合时的基节长度l
b
为:
[0065]
l
b
=π
×
m
×
cos(α)
[0066]
内齿圈齿顶修形终止点直径d
d2
为:
[0067][0068]
3)根据修形作用力f
t
计算行星轮在啮合过程中齿高方向的变形量,将变形量作为行星轮的齿顶修形量δ5:
[0069]
δ5=f
t
/b/12500
[0070]
所述行星轮的外齿和内齿的齿顶修形终止点均为单双齿对啮合交替处,其外齿齿顶修形终止点的直径d
d3
的计算如下:
[0071][0072][0073]
j1=l
ae
‑
l
b
[0074]
式中,k2、j1均为过渡参数;
[0075]
其内齿齿顶修形终止点的直径d
d4
的计算如下:
[0076][0077][0078]
j2=l
sr
‑
l
b
[0079]
式中,k2、j2均为过渡参数;
[0080]
由于行星轮内、外齿齿顶修形的终止点直径须保持一致,因此将行星轮齿顶修形终止点直径d
d5
的取值最终设定为:
[0081]
d
d5
=max(d
d3
,d
d4
)。
[0082]
本发明所提供的一种风电齿轮箱柔性销行星传动齿轮修形校核系统,所述系统为基于matlab开发的校核工具,所述系统区分有三大模块,分别为参数及载荷谱输入模块、齿轮齿向修形模块和齿轮齿顶修形模块;其中:
[0083]
所述参数及载荷谱输入模块,用于输入行星传动齿轮的基本参数及ldd载荷谱,通过输入的ldd载荷谱进行等效扭矩计算,进而根据等效扭矩计算出修形作用力;
[0084]
所述齿轮齿向修形模块,包括对行星传动齿轮的太阳轮和行星轮进行齿向修形校核;其中,在太阳轮上的齿向修形校核是指在太阳轮上进行螺旋修形,螺旋修形量为太阳轮扭转变形量,根据修形作用力结合行星传动齿轮的基本参数计算得出;在行星轮上的齿向修形校核是指在其内齿和外齿上分别进行鼓形修形以及在其内齿和外齿上分别进行倒坡修形,其鼓形修形量为行星轮螺旋线总偏差,其倒坡修形量根据修形作用力结合行星传动齿轮的基本参数计算得出;
[0085]
所述齿轮齿顶修形模块,包括对行星传动齿轮的太阳轮、内齿圈和行星轮进行齿顶修形校核,其中,在太阳轮、内齿圈和行星轮的齿顶上的修形量为啮合过程中太阳轮、内齿圈和行星轮在齿高方向上的变形量,分别根据修形作用力结合行星传动齿轮的基本参数计算得出。
[0086]
进一步,所述参数及载荷谱输入模块的具体情况如下:
[0087]
利用ldd载荷谱计算出等效扭矩m
eq
:
[0088][0089]
式中,m
i
为ldd载荷谱中每个工况的扭矩载荷,n
i
为ldd载荷谱中每个工况的循环次数,i为载荷谱工况的次数;
[0090]
通过等效扭矩m
eq
求出修形作用力f
t
:
[0091]
f
t
=0.5
×
m
eq
/a/s
[0092]
式中,a为柔性销行星传动中心距,s为行星轮数量。
[0093]
进一步,所述齿轮齿向修形模块的具体情况如下:
[0094]
根据修形作用力f
t
求出太阳轮扭转变形量,作为太阳轮的螺旋修形量δ1:
[0095][0096]
式中,y=d
空
/d1,d
空
为太阳轮内腔直径,d1为太阳轮分度圆直径,b为行星轮的齿宽,s为行星轮数量;
[0097]
根据修形作用力f
t
求出行星轮的倒坡修形量δ2:
[0098]
δ2=f
t
/b/20000
[0099]
倒坡修形的长度根据行星轮齿宽上应力集中现象的长度决定;
[0100]
所述行星轮螺旋线总偏差是结合行星轮的参数及精度等级根据gb/t10095.1
‑
2001标准查询得到。
[0101]
进一步,倒坡修形的长度l=b
×
10%。
[0102]
进一步,所述齿轮齿顶修形模块的具体情况如下:
[0103]
1)根据修形作用力f
t
计算太阳轮在啮合过程中齿高方向的变形量,将变形量作为太阳轮的齿顶修形量δ3:
[0104]
δ3=f
t
/b/12500
[0105]
式中,b为行星轮的齿宽;
[0106]
所述太阳轮的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:
[0107]
根据行星传动齿轮的基本参数计算太阳轮的基圆直径:d
b1
=z1×
m
×
cos(α)
[0108]
式中,z1为太阳轮齿数,m为模数,α为齿形角;
[0109]
根据行星传动齿轮的基本参数计算行星轮基圆直径:d
b2
=z2×
m
×
cos(α)
[0110]
式中,z2为行星轮齿数,m为模数,α为齿形角;
[0111]
太阳轮和行星轮未变位时的中心距:a1=0.5m
×
(z1 z2)
[0112]
太阳轮与行星轮啮合时的啮合角:α1=acos[a1/a
×
cos(α)]
[0113]
式中,a为柔性销行星传动中心距;
[0114]
根据啮合角α1计算太阳轮与行星轮啮合时的极限点长度n1n2:
[0115]
n1n2=0.5
×
d
b1
×
tan(α1) 0.5
×
d
b2
×
tan(α1)
[0116]
根据极限点长度n1n2计算太阳轮与行星轮啮合时的啮合线长度l
ae
:
[0117][0118]
式中,d
a1
为太阳轮齿顶圆直径,d
a2
为行星轮齿顶圆直径;
[0119]
太阳轮与行星轮啮合时的基节长度l
b
为:
[0120]
l
b
=π
×
m
×
cos(α)
[0121]
太阳轮齿顶修形终止点的直径d
d1
为:
[0122][0123][0124]
j1=l
ae
‑
l
b
[0125]
式中,k1、j1均为过渡参数;
[0126]
2)根据修形作用力f
t
计算内齿圈在啮合过程中齿高方向的变形量,将变形量作为内齿圈的齿顶修形量δ4:
[0127]
δ4=f
t
/b/12500
[0128]
所述内齿圈的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:
[0129]
根据行星传动齿轮的基本参数计算内齿圈基圆直径:d
b3
=z3×
m
×
cos(α)
[0130]
式中,z3为内齿圈齿数,m为齿轮模数,α为齿形角;
[0131]
行星轮的基圆直径:d
b2
=z2×
m
×
cos(α)
[0132]
内齿圈和行星轮未变位时的中心距:a2=0.5m
×
(z3‑
z2)
[0133]
內齿圈与行星轮啮合时的啮合角α2为:α2=acos[a2/a
×
cos(α)]
[0134]
式中,a为柔性销行星传动中心距;
[0135]
根据啮合角α2计算內齿圈与行星轮啮合的极限点长度n3n2:
[0136]
n3n2=0.5
×
d
b3
×
tan(α2)
‑
0.5
×
d
b2
×
tan(α2)
[0137]
根据极限点长度n3n2计算內齿圈与行星轮啮合时的啮合线长度l
sr
:
[0138][0139]
式中,d
a3
为内齿圈齿顶圆直径,d
a2
为行星轮齿顶圆直径;
[0140]
內齿圈与行星轮啮合时的基节长度l
b
为:
[0141]
l
b
=π
×
m
×
cos(α)
[0142]
内齿圈齿顶修形终止点直径d
d2
为:
[0143][0144]
3)根据修形作用力f
t
计算行星轮在啮合过程中齿高方向的变形量,将变形量作为行星轮的齿顶修形量δ5:
[0145]
δ5=f
t
/b/12500
[0146]
所述行星轮的外齿和内齿的齿顶修形终止点均为单双齿对啮合交替处,其外齿齿顶修形终止点的直径d
d3
的计算如下:
[0147][0148][0149]
j1=l
ae
‑
l
b
[0150]
式中,k2、j1均为过渡参数;
[0151]
其内齿齿顶修形终止点的直径d
d4
的计算如下:
[0152][0153][0154]
j2=l
sr
‑
l
b
[0155]
式中,k2、j2均为过渡参数;
[0156]
由于行星轮内、外齿齿顶修形的终止点直径须保持一致,因此将行星轮齿顶修形终止点直径d
d5
的取值最终设定为:
[0157]
d
d5
=max(d
d3
,d
d4
)。
[0158]
本发明与现有技术相比,具有如下优点与有益效果:
[0159]
本发明的方法和系统通过结合理论和实践经验选择最优的修形方式,对不同柔性销、不同变载工况下的柔性销行星传动齿轮进行规范化标准化的修形校核,使用户在保证修形精度的同时,高效快捷的完成对柔性销行星传动齿轮的修形校核,大大提高齿轮箱的研发效率及可靠性;同时便于在齿轮箱测试或在运行实践中进一步总结经验,不断完善本发明的方法和系统,进一步提高齿轮箱的研发效率及可靠性,提高风电机组设计的研发效率及可靠性。
附图说明
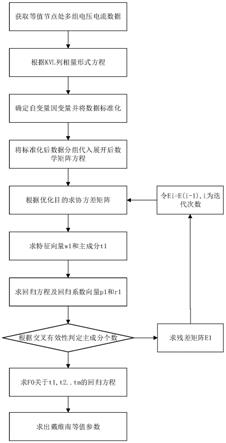
[0160]
图1为本发明的齿轮修形校核系统的主界面图一。
[0161]
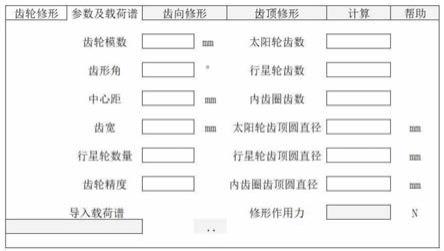
图2为本发明的齿轮修形校核系统的主界面图二。
[0162]
图3为本发明的齿轮修形校核系统的主界面图三。
具体实施方式
[0163]
下面结合具体实施例对本发明作进一步说明。
[0164]
本实施例所述的风电齿轮箱柔性销行星传动齿轮修形校核方法,所述方法包括:
[0165]
利用ldd载荷谱进行等效扭矩计算,进而根据等效扭矩计算出修形作用力;具体情况如下:
[0166]
利用ldd载荷谱计算出等效扭矩m
eq
:
[0167]
[0168]
式中,m
i
为ldd载荷谱中每个工况的扭矩载荷,n
i
为ldd载荷谱中每个工况的循环次数,i为载荷谱工况的次数;
[0169]
通过等效扭矩m
eq
求出修形作用力f
t
:
[0170]
f
t
=0.5
×
m
eq
/a/s
[0171]
式中,a为柔性销行星传动中心距,即柔性销与太阳轮的中心距离,s为行星轮数量。
[0172]
由于行星传动齿轮传动过程中行星轮与太阳轮为外啮合,行星轮与内齿圈为内啮合,行星轮在受力后不偏载,太阳轮和内齿圈均会产生扭转变形,且由于太阳轮的扭转变形相对内齿圈的扭转变形较大,并且太阳轮需要浮动,因此将太阳轮的扭转变形及浮动所产生的影响通过在太阳轮上进行螺旋修形以及在行星轮与太阳轮相啮合的外齿上进行鼓形修形来弥补,其中,螺旋修形量即为太阳轮扭转变形量,根据修形作用力结合行星传动齿轮的基本参数求解,鼓形修形量为行星轮螺旋线总偏差fβ。同时由于内齿圈的扭转变形相对太阳轮的扭矩变形相对较小,内齿圈的齿向不修形,将内齿圈的扭转变形通过在行星轮的内齿上进行鼓形修形来弥补,内齿上的鼓形修形量与外齿上的鼓形修形量相等。另外在行星传动齿轮传动过程中,行星轮的外齿和内齿的齿宽两端(约占齿宽8%)处均有应力集中现象,即齿轮的边缘效应,因此在行星轮内齿和外齿的齿宽两端分别进行倒坡修形以减小应力集中的影响。其中,所述螺旋修形量及倒坡修形量的计算过程如下:
[0173]
根据修形作用力f
t
求出太阳轮扭转变形量,作为太阳轮的螺旋修形量δ1:
[0174][0175]
式中,y=d
空
/d1,d
空
为太阳轮内腔直径,d1为太阳轮分度圆直径,b为行星轮的齿宽;
[0176]
根据修形作用力f
t
求出行星轮的倒坡修形量δ2:
[0177]
δ2=f
t
/b/20000
[0178]
式中,b为行星轮的齿宽。
[0179]
倒坡修形的长度根据行星轮齿宽上应力集中现象的长度决定,本实施例行星轮上齿宽两端的应力集中现象分别占齿宽8%,取齿宽每一端的倒坡修形长度略大于齿宽8%,约为l=b
×
10%。
[0180]
所述行星轮螺旋线总偏差fβ是结合行星轮的参数及精度等级,根据gb/t10095.1
‑
2001标准(渐开线圆柱齿轮精度第1部分
‑
轮齿同侧齿面偏差的定义和允许值)查询得到。
[0181]
由于在行星传动齿轮传动过程中,其太阳轮、行星轮和内齿圈的齿顶均会产生变形,从而产生冲击及振动噪音,因此需要将太阳轮、行星轮和内齿圈的齿顶的变形量去掉,即进行齿顶修形,齿顶的修形量即为太阳轮、行星轮和内齿圈啮合过程中齿高方向的变形量,根据修形作用力结合行星传动齿轮的基本参数求解,具体求解情况如下:
[0182]
1)根据修形作用力f
t
计算太阳轮在啮合过程中齿高方向的变形量,将变形量作为太阳轮的齿顶修形量δ3:
[0183]
δ3=f
t
/b/12500
[0184]
式中,b为行星轮的齿宽;
[0185]
所述太阳轮的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如
下:
[0186]
根据行星传动齿轮的基本参数计算太阳轮的基圆直径:d
b1
=z1×
m
×
cos(α)
[0187]
式中,z1为太阳轮齿数,m为模数,α为齿形角;
[0188]
根据行星传动齿轮的基本参数计算行星轮基圆直径:d
b2
=z2×
m
×
cos(α)
[0189]
式中,z2为行星轮齿数,m为模数,α为齿形角;
[0190]
太阳轮和行星轮未变位时的中心距:a1=0.5m
×
(z1 z2)
[0191]
太阳轮与行星轮啮合时的啮合角:α1=acos[a1/a
×
cos(α)]
[0192]
式中,a为柔性销行星传动中心距;
[0193]
根据啮合角α1计算太阳轮与行星轮啮合时的极限点长度n1n2:
[0194]
n1n2=0.5
×
d
b1
×
tan(α1) 0.5
×
d
b2
×
tan(α1)
[0195]
根据极限点长度n1n2计算太阳轮与行星轮啮合时的啮合线长度l
ae
:
[0196][0197]
式中,d
a1
为太阳轮齿顶圆直径,d
a2
为行星轮齿顶圆直径;
[0198]
太阳轮与行星轮啮合时的基节长度l
b
为:
[0199]
l
b
=π
×
m
×
cos(α)
[0200]
太阳轮齿顶修形终止点的直径d
d1
为:
[0201][0202][0203]
j1=l
ae
‑
l
b
[0204]
式中,k1、j1均为过渡参数;
[0205]
2)根据修形作用力f
t
计算内齿圈在啮合过程中齿高方向的变形量,将变形量作为内齿圈的齿顶修形量δ4:
[0206]
δ4=f
t
/b/12500
[0207]
所述内齿圈的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:
[0208]
根据行星传动齿轮的基本参数计算内齿圈基圆直径:d
b3
=z3×
m
×
cos(α)
[0209]
式中,z3为内齿圈齿数,m为齿轮模数,α为齿形角;
[0210]
行星轮的基圆直径:d
b2
=z2×
m
×
cos(α)
[0211]
内齿圈和行星轮未变位时的中心距:a2=0.5m
×
(z3‑
z2)
[0212]
內齿圈与行星轮啮合时的啮合角α2为:α2=acos[a2/a
×
cos(α)]
[0213]
式中,a为柔性销行星传动中心距;
[0214]
根据啮合角α2计算內齿圈与行星轮啮合的极限点长度n3n2:
[0215]
n3n2=0.5
×
d
b3
×
tan(α2)
‑
0.5
×
d
b2
×
tan(α2)
[0216]
根据极限点长度n3n2计算內齿圈与行星轮啮合时的啮合线长度l
sr
:
[0217]
[0218]
式中,d
a3
为内齿圈齿顶圆直径,d
a2
为行星轮齿顶圆直径;
[0219]
內齿圈与行星轮啮合时的基节长度l
b
为:
[0220]
l
b
=π
×
m
×
cos(α)
[0221]
内齿圈齿顶修形终止点直径d
d2
为:
[0222][0223]
3)根据修形作用力f
t
计算行星轮在啮合过程中齿高方向的变形量,将变形量作为行星轮的齿顶修形量δ5:
[0224]
δ5=f
t
/b/12500
[0225]
所述行星轮的外齿和内齿的齿顶修形终止点均为单双齿对啮合交替处,其外齿齿顶修形终止点的直径d
d3
的计算如下:
[0226][0227][0228]
j1=l
ae
‑
l
b
[0229]
式中,k2、j1均为过渡参数;
[0230]
其内齿齿顶修形终止点的直径d
d4
的计算如下:
[0231][0232][0233]
j2=l
sr
‑
l
b
[0234]
式中,k2、j2均为过渡参数;
[0235]
由于行星轮内、外齿齿顶修形的终止点直径须保持一致,因此将行星轮齿顶修形终止点直径d
d5
的取值最终设定为:
[0236]
d
d5
=max(d
d3
,d
d4
)。
[0237]
本实施例所提供的风电齿轮箱柔性销行星传动齿轮修形校核系统,为基于matlab开发的校核工具,其主界面如图1至图3所示,所述系统区分有三大模块,分别为参数及载荷谱输入模块、齿轮齿向修形模块和齿轮齿顶修形模块;其中:
[0238]
所述参数及载荷谱输入模块,用于输入行星传动齿轮的基本参数和载荷谱,基本参数包括齿轮齿数、齿轮模数、齿形角、中心距、齿宽、行星轮数量、齿轮精度及齿顶圆直径,然后通过输入的ldd载荷谱进行等效扭矩计算,进而根据等效扭矩计算出修形作用力,计算过程如下:
[0239]
利用ldd载荷谱计算出等效扭矩m
eq
:
[0240]
[0241]
式中,m
i
为ldd载荷谱中每个工况的扭矩载荷,n
i
为ldd载荷谱中每个工况的循环次数,i为载荷谱工况的次数;
[0242]
通过等效扭矩m
eq
求出修形作用力f
t
:
[0243]
f
t
=0.5
×
m
eq
/a/s
[0244]
式中,a为柔性销行星传动中心距,s为行星轮数量。
[0245]
所述齿轮齿向修形模块,包括对行星传动齿轮的太阳轮和行星轮进行齿向修形校核;其中,在太阳轮上的齿向修形校核是指在太阳轮上进行螺旋修形,螺旋修形量为太阳轮扭转变形量,根据修形作用力结合行星传动齿轮的基本参数计算得出;在行星轮上的齿向修形校核是指在其内齿和外齿上分别进行鼓形修形以及在其内齿和外齿上分别进行倒坡修形,其鼓形修形量为行星轮螺旋线总偏差fβ,其倒坡修形量根据修形作用力结合行星传动齿轮的基本参数计算得出,计算过程具体情况如下:
[0246]
根据修形作用力f
t
求出太阳轮扭转变形量,即太阳轮的螺旋修形量δ1:
[0247][0248]
式中,y=d
空
/d1,d
空
为太阳轮内腔直径,d1为太阳轮分度圆直径,b为行星轮的齿宽;
[0249]
根据修形作用力f
t
求出行星轮的倒坡修形量δ2:
[0250]
δ2=f
t
/b/20000
[0251]
式中,b为行星轮的齿宽;
[0252]
倒坡修形的长度根据行星轮齿宽上应力集中现象的长度决定,本实施例行星轮上齿宽两端的应力集中现象分别占齿宽8%,取齿宽每一端的倒坡修形长度略大于齿宽8%,约为l=b
×
10%。
[0253]
所述行星轮螺旋线总偏差fβ是结合行星轮的参数及精度等级,根据gb/t10095.1
‑
2001标准(渐开线圆柱齿轮精度第1部分
‑
轮齿同侧齿面偏差的定义和允许值)查询得到。
[0254]
所述齿轮齿顶修形模块,包括对行星传动齿轮的太阳轮、内齿圈和行星轮进行齿顶修形校核,其中,在太阳轮、内齿圈和行星轮的齿顶上的修形量为啮合过程中太阳轮、内齿圈和行星轮在齿高方向上的变形量,分别根据修形作用力结合行星传动齿轮的基本参数计算得出,计算过程具体情况如下:
[0255]
1)根据修形作用力f
t
计算太阳轮在啮合过程中齿高方向的变形量,将变形量作为太阳轮的齿顶修形量δ3:
[0256]
δ3=f
t
/b/12500
[0257]
式中,b为行星轮的齿宽;
[0258]
所述太阳轮的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:
[0259]
根据行星传动齿轮的基本参数计算太阳轮的基圆直径:d
b1
=z1×
m
×
cos(α)
[0260]
式中,z1为太阳轮齿数,m为模数,α为齿形角;
[0261]
根据行星传动齿轮的基本参数计算行星轮基圆直径:d
b2
=z2×
m
×
cos(α)
[0262]
式中,z2为行星轮齿数,m为模数,α为齿形角;
[0263]
太阳轮和行星轮未变位时的中心距:a1=0.5m
×
(z1 z2)
[0264]
太阳轮与行星轮啮合时的啮合角:α1=acos[a1/a
×
cos(α)]
[0265]
式中,a为柔性销行星传动中心距;
[0266]
根据啮合角α1计算太阳轮与行星轮啮合时的极限点长度n1n2:
[0267]
n1n2=0.5
×
d
b1
×
tan(α1) 0.5
×
d
b2
×
tan(α1)
[0268]
根据极限点长度n1n2计算太阳轮与行星轮啮合时的啮合线长度l
ae
:
[0269][0270]
式中,d
a1
为太阳轮齿顶圆直径,d
a2
为行星轮齿顶圆直径;
[0271]
太阳轮与行星轮啮合时的基节长度l
b
为:
[0272]
l
b
=π
×
m
×
cos(α)
[0273]
太阳轮齿顶修形终止点的直径d
d1
为:
[0274][0275][0276]
j1=l
ae
‑
l
b
[0277]
式中,k1、j1均为过渡参数;
[0278]
2)根据修形作用力f
t
计算内齿圈在啮合过程中齿高方向的变形量,将变形量作为内齿圈的齿顶修形量δ4:
[0279]
δ4=f
t
/b/12500
[0280]
所述内齿圈的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:
[0281]
根据行星传动齿轮的基本参数计算内齿圈基圆直径:d
b3
=z3×
m
×
cos(α)
[0282]
式中,z3为内齿圈齿数,m为齿轮模数,α为齿形角;
[0283]
行星轮的基圆直径:d
b2
=z2×
m
×
cos(α)
[0284]
内齿圈和行星轮未变位时的中心距:a2=0.5m
×
(z3‑
z2)
[0285]
內齿圈与行星轮啮合时的啮合角α2为:α2=acos[a2/a
×
cos(α)]
[0286]
式中,a为柔性销行星传动中心距;
[0287]
根据啮合角α2计算內齿圈与行星轮啮合的极限点长度n3n2:
[0288]
n3n2=0.5
×
d
b3
×
tan(α2)
‑
0.5
×
d
b2
×
tan(α2)
[0289]
根据极限点长度n3n2计算內齿圈与行星轮啮合时的啮合线长度l
sr
:
[0290][0291]
式中,d
a3
为内齿圈齿顶圆直径,d
a2
为行星轮齿顶圆直径;
[0292]
內齿圈与行星轮啮合时的基节长度l
b
为:
[0293]
l
b
=π
×
m
×
cos(α)
[0294]
内齿圈齿顶修形终止点直径d
d2
为:
[0295]
[0296]
3)根据修形作用力f
t
计算行星轮在啮合过程中齿高方向的变形量,将变形量作为行星轮的齿顶修形量δ5:
[0297]
δ5=f
t
/b/12500
[0298]
所述行星轮的外齿和内齿的齿顶修形终止点均为单双齿对啮合交替处,其外齿齿顶修形终止点的直径d
d3
的计算如下:
[0299][0300][0301]
j1=l
ae
‑
l
b
[0302]
式中,k2、j1均为过渡参数;
[0303]
其内齿齿顶修形终止点的直径d
d4
的计算如下:
[0304][0305][0306]
j2=l
sr
‑
l
b
[0307]
式中,k2、j2均为过渡参数;
[0308]
由于行星轮内、外齿齿顶修形的终止点直径须保持一致,因此将行星轮齿顶修形终止点直径d
d5
的取值最终设定为:
[0309]
d
d5
=max(d
d3
,d
d4
)。
[0310]
本实施例的每个模块在自动计算后会自动生成报告,并形成word报告下载链接,便于工作人员查看。
[0311]
以上所述之实施例子只为本发明之较佳实施例,并非以此限制本发明的实施范围,故凡依本发明之形状、原理所作的变化,均应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。