技术特征:
1.一种风电齿轮箱柔性销行星传动齿轮修形校核方法,其特征在于,所述方法包括:利用ldd载荷谱进行等效扭矩计算,进而根据等效扭矩计算出修形作用力;根据修形作用力结合行星传动齿轮的基本参数分别计算出行星传动齿轮的太阳轮和行星轮齿向修形校核的螺旋修形量和倒坡修形量,进而根据螺旋修形量对太阳轮进行螺旋修形,根据倒坡修形量对行星轮的内齿和外齿分别进行倒坡修形,根据行星轮螺旋线总偏差对行星轮的内齿和外齿分别进行鼓形修形;根据修形作用力结合行星传动齿轮的基本参数分别计算出在行星传动齿轮啮合过程中,其太阳轮、内齿圈和行星轮在齿高方向上的变形量,进而将变形量作为齿顶修形量分别对太阳轮、内齿圈和行星轮进行齿顶修形。2.根据权利要求1所述的一种风电齿轮箱柔性销行星传动齿轮修形校核方法,其特征在于,所述利用ldd载荷谱进行等效扭矩计算,进而根据等效扭矩计算出修形作用力的具体情况如下:利用ldd载荷谱计算出等效扭矩m
eq
:式中,m
i
为ldd载荷谱中每个工况的扭矩载荷,n
i
为ldd载荷谱中每个工况的循环次数,i为载荷谱工况的次数;通过等效扭矩m
eq
求出修形作用力f
t
:f
t
=0.5
×
m
eq
/a/s式中,a为柔性销行星传动中心距,即柔性销与太阳轮的中心距离,s为行星轮数量。3.根据权利要求1所述的一种风电齿轮箱柔性销行星传动齿轮修形校核方法,其特征在于,所述根据修形作用力结合行星传动齿轮的基本参数分别计算出行星传动齿轮的太阳轮和行星轮齿向修形校核的螺旋修形量和倒坡修形量,进而根据螺旋修形量对太阳轮进行螺旋修形,根据倒坡修形量对行星轮的内齿和外齿分别进行倒坡修形,根据行星轮螺旋线总偏差对行星轮的内齿和外齿分别进行鼓形修形的具体情况如下:根据修形作用力f
t
求出太阳轮扭转变形量,作为太阳轮的螺旋修形量δ1:式中,y=d
空
/d1,d
空
为太阳轮内腔直径,d1为太阳轮分度圆直径,b为行星轮的齿宽,s为行星轮数量;根据修形作用力f
t
求出行星轮的倒坡修形量δ2:δ2=f
t
/b/20000倒坡修形的长度根据行星轮齿宽上应力集中现象的长度决定;所述行星轮螺旋线总偏差是结合行星轮的参数及精度等级根据gb/t10095.1
‑
2001标准查询得到。4.根据权利要求3所述的一种风电齿轮箱柔性销行星传动齿轮修形校核方法,其特征
在于,倒坡修形的长度l=b
×
10%。5.根据权利要求1所述的一种风电齿轮箱柔性销行星传动齿轮修形校核方法,其特征在于,所述根据修形作用力结合行星传动齿轮的基本参数分别计算出在行星传动齿轮啮合过程中,其太阳轮、内齿圈和行星轮在齿高方向上的变形量,进而将变形量作为齿顶修形量的具体情况如下:1)根据修形作用力f
t
计算太阳轮在啮合过程中齿高方向的变形量,将变形量作为太阳轮的齿顶修形量δ3:δ3=f
t
/b/12500式中,b为行星轮的齿宽;所述太阳轮的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:根据行星传动齿轮的基本参数计算太阳轮的基圆直径:d
b1
=z1×
m
×
cos(α)式中,z1为太阳轮齿数,m为模数,α为齿形角;根据行星传动齿轮的基本参数计算行星轮基圆直径:d
b2
=z2×
m
×
cos(α)式中,z2为行星轮齿数,m为模数,α为齿形角;太阳轮和行星轮未变位时的中心距:a1=0.5m
×
(z1 z2)太阳轮与行星轮啮合时的啮合角:α1=acos[a1/a
×
cos(α)]式中,a为柔性销行星传动中心距;根据啮合角α1计算太阳轮与行星轮啮合时的极限点长度n1n2:n1n2=0.5
×
d
b1
×
tan(α1) 0.5
×
d
b2
×
tan(α1)根据极限点长度n1n2计算太阳轮与行星轮啮合时的啮合线长度l
ae
:式中,d
a1
为太阳轮齿顶圆直径,d
a2
为行星轮齿顶圆直径;太阳轮与行星轮啮合时的基节长度l
b
为:l
b
=π
×
m
×
cos(α)太阳轮齿顶修形终止点的直径d
d1
为:为:j1=l
ae
‑
l
b
式中,k1、j1均为过渡参数;2)根据修形作用力f
t
计算内齿圈在啮合过程中齿高方向的变形量,将变形量作为内齿圈的齿顶修形量δ4:δ4=f
t
/b/12500所述内齿圈的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:根据行星传动齿轮的基本参数计算内齿圈基圆直径:d
b3
=z3×
m
×
cos(α)式中,z3为内齿圈齿数,m为齿轮模数,α为齿形角;行星轮的基圆直径:d
b2
=z2×
m
×
cos(α)内齿圈和行星轮未变位时的中心距:a2=0.5m
×
(z3‑
z2)
內齿圈与行星轮啮合时的啮合角α2为:α2=acos[a2/a
×
cos(α)]式中,a为柔性销行星传动中心距;根据啮合角α2计算內齿圈与行星轮啮合的极限点长度n3n2:n3n2=0.5
×
d
b3
×
tan(α2)
‑
0.5
×
d
b2
×
tan(α2)根据极限点长度n3n2计算內齿圈与行星轮啮合时的啮合线长度l
sr
:式中,d
a3
为内齿圈齿顶圆直径,d
a2
为行星轮齿顶圆直径;內齿圈与行星轮啮合时的基节长度l
b
为:l
b
=π
×
m
×
cos(α)内齿圈齿顶修形终止点直径d
d2
为:3)根据修形作用力f
t
计算行星轮在啮合过程中齿高方向的变形量,将变形量作为行星轮的齿顶修形量δ5:δ5=f
t
/b/12500所述行星轮的外齿和内齿的齿顶修形终止点均为单双齿对啮合交替处,其外齿齿顶修形终止点的直径d
d3
的计算如下:的计算如下:j1=l
ae
‑
l
b
式中,k2、j1均为过渡参数;其内齿齿顶修形终止点的直径d
d4
的计算如下:的计算如下:j2=l
sr
‑
l
b
式中,k2、j2均为过渡参数;由于行星轮内、外齿齿顶修形的终止点直径须保持一致,因此将行星轮齿顶修形终止点直径d
d5
的取值最终设定为:d
d5
=max(d
d3
,d
d4
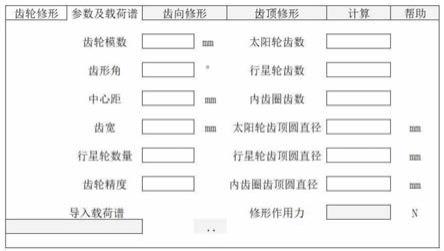
)。6.一种风电齿轮箱柔性销行星传动齿轮修形校核系统,其特征在于:所述系统为基于matlab开发的校核工具,所述系统区分有三大模块,分别为参数及载荷谱输入模块、齿轮齿向修形模块和齿轮齿顶修形模块;其中:所述参数及载荷谱输入模块,用于输入行星传动齿轮的基本参数及ldd载荷谱,通过输入的ldd载荷谱进行等效扭矩计算,进而根据等效扭矩计算出修形作用力;所述齿轮齿向修形模块,包括对行星传动齿轮的太阳轮和行星轮进行齿向修形校核;
其中,在太阳轮上的齿向修形校核是指在太阳轮上进行螺旋修形,螺旋修形量为太阳轮扭转变形量,根据修形作用力结合行星传动齿轮的基本参数计算得出;在行星轮上的齿向修形校核是指在其内齿和外齿上分别进行鼓形修形以及在其内齿和外齿上分别进行倒坡修形,其鼓形修形量为行星轮螺旋线总偏差,其倒坡修形量根据修形作用力结合行星传动齿轮的基本参数计算得出;所述齿轮齿顶修形模块,包括对行星传动齿轮的太阳轮、内齿圈和行星轮进行齿顶修形校核,其中,在太阳轮、内齿圈和行星轮的齿顶上的修形量为啮合过程中太阳轮、内齿圈和行星轮在齿高方向上的变形量,分别根据修形作用力结合所需的行星传动齿轮的基本参数计算得出。7.根据权利要求6所述的一种风电齿轮箱柔性销行星传动齿轮修形校核系统,其特征在于,所述参数及载荷谱输入模块的具体情况如下:利用ldd载荷谱计算出等效扭矩m
eq
:式中,m
i
为ldd载荷谱中每个工况的扭矩载荷,n
i
为ldd载荷谱中每个工况的循环次数,i为载荷谱工况的次数;通过等效扭矩m
eq
求出修形作用力f
t
:f
t
=0.5
×
m
eq
/a/s式中,a为柔性销行星传动中心距,即柔性销与太阳轮的中心距离,s为行星轮数量。8.根据权利要求6所述的一种风电齿轮箱柔性销行星传动齿轮修形校核系统,其特征在于,所述齿轮齿向修形模块的具体情况如下:根据修形作用力f
t
求出太阳轮扭转变形量,作为太阳轮的螺旋修形量δ1:式中,y=d
空
/d1,d
空
为太阳轮内腔直径,d1为太阳轮分度圆直径,b为行星轮的齿宽,s为行星轮数量;根据修形作用力f
t
求出行星轮的倒坡修形量δ2:δ2=f
t
/b/20000倒坡修形的长度根据行星轮齿宽上应力集中现象的长度决定;所述行星轮螺旋线总偏差是结合行星轮的参数及精度等级根据gb/t10095.1
‑
2001标准查询得到。9.根据权利要求8所述的一种风电齿轮箱柔性销行星传动齿轮修形校核系统,其特征在于,倒坡修形的长度l=b
×
10%。10.根据权利要求6所述的一种风电齿轮箱柔性销行星传动齿轮修形校核系统,其特征在于,所述齿轮齿顶修形模块的具体情况如下:1)根据修形作用力f
t
计算太阳轮在啮合过程中齿高方向的变形量,将变形量作为太阳
轮的齿顶修形量δ3:δ3=f
t
/b/12500式中,b为行星轮的齿宽;所述太阳轮的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:根据行星传动齿轮的基本参数计算太阳轮的基圆直径:d
b1
=z1×
m
×
cos(α)式中,z1为太阳轮齿数,m为模数,α为齿形角;根据行星传动齿轮的基本参数计算行星轮基圆直径:d
b2
=z2×
m
×
cos(α)式中,z2为行星轮齿数,m为模数,α为齿形角;太阳轮和行星轮未变位时的中心距:a1=0.5m
×
(z1 z2)太阳轮与行星轮啮合时的啮合角:α1=acos[a1/a
×
cos(α)]式中,a为柔性销行星传动中心距;根据啮合角α1计算太阳轮与行星轮啮合时的极限点长度n1n2:n1n2=0.5
×
d
b1
×
tan(α1) 0.5
×
d
b2
×
tan(α1)根据极限点长度n1n2计算太阳轮与行星轮啮合时的啮合线长度l
ae
:式中,d
a1
为太阳轮齿顶圆直径,d
a2
为行星轮齿顶圆直径;太阳轮与行星轮啮合时的基节长度l
b
为:l
b
=π
×
m
×
cos(α)太阳轮齿顶修形终止点的直径d
d1
为:为:j1=l
ae
‑
l
b
式中,k1、j1均为过渡参数;2)根据修形作用力f
t
计算内齿圈在啮合过程中齿高方向的变形量,将变形量作为内齿圈的齿顶修形量δ4:δ4=f
t
/b/12500所述内齿圈的齿顶修形终止点为单双齿对啮合交替处,该终止点的计算过程如下:根据行星传动齿轮的基本参数计算内齿圈基圆直径:d
b3
=z3×
m
×
cos(α)式中,z3为内齿圈齿数,m为齿轮模数,α为齿形角;行星轮的基圆直径:d
b2
=z2×
m
×
cos(α)内齿圈和行星轮未变位时的中心距:a2=0.5m
×
(z3‑
z2)內齿圈与行星轮啮合时的啮合角α2为:α2=acos[a2/a
×
cos(α)]式中,a为柔性销行星传动中心距;根据啮合角α2计算內齿圈与行星轮啮合的极限点长度n3n2:n3n2=0.5
×
d
b3
×
tan(α2)
‑
0.5
×
d
b2
×
tan(α2)根据极限点长度n3n2计算內齿圈与行星轮啮合时的啮合线长度l
sr
:
式中,d
a3
为内齿圈齿顶圆直径,d
a2
为行星轮齿顶圆直径;內齿圈与行星轮啮合时的基节长度l
b
为:l
b
=π
×
m
×
cos(α)内齿圈齿顶修形终止点直径d
d2
为:3)根据修形作用力f
t
计算行星轮在啮合过程中齿高方向的变形量,将变形量作为行星轮的齿顶修形量δ5:δ5=f
t
/b/12500所述行星轮的外齿和内齿的齿顶修形终止点均为单双齿对啮合交替处,其外齿齿顶修形终止点的直径d
d3
的计算如下:的计算如下:j1=l
ae
‑
l
b
式中,k2、j1均为过渡参数;其内齿齿顶修形终止点的直径d
d4
的计算如下:的计算如下:j2=l
sr
‑
l
b
式中,k2、j2均为过渡参数;由于行星轮内、外齿齿顶修形的终止点直径须保持一致,因此将行星轮齿顶修形终止点直径d
d5
的取值最终设定为:d
d5
=max(d
d3
,d
d4
)。
技术总结
本发明公开了一种风电齿轮箱柔性销行星传动齿轮修形校核方法及系统,利用LDD载荷谱进行等效扭矩计算,进而根据等效扭矩计算出修形作用力;根据修形作用力分别计算出对行星传动齿轮的太阳轮、行星轮进行齿向修形校核的螺旋修形量和倒坡修形量,根据螺旋修形量对太阳轮进行螺旋修形,根据倒坡修形量及行星轮螺旋线总偏差对行星轮分别进行倒坡修形和鼓形修形;根据修形作用力计算出在行星传动齿轮啮合过程中其太阳轮、内齿圈和行星轮在齿高方向上的变形量,根据变形量对太阳轮、内齿圈和行星轮进行齿顶修形。本发明将柔性销行星传动齿轮的修形校核规范化、标准化,在保证齿轮修形校核精度的同时,能够大大提高齿轮箱的研发效率及可靠性。及可靠性。及可靠性。
技术研发人员:夏国锋 郑传统 燕友增 崔红柳
受保护的技术使用者:明阳智慧能源集团股份公司
技术研发日:2021.08.25
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。