1.本发明涉及使用了多个图像传感器的被检查体的检查装置以及检查方法,提高被检查体中的对象物的检测再现性以及检测概率。
背景技术:
2.在半导体、电子设备、二次电池等的设备领域,已知使用光电变换型的图像传感器,对被检查体中的对象物(异物、缺陷等)进行检测的缺陷检测装置。
3.近年来,在这些领域中,由于产品的高精度化、小型化导致被检查体中的异物、缺陷的尺寸变小。此外,要求生产的效率化、品质改善,伴随于此,需要制造工序的高速化、成品率提高等。为了制造工序的高速化、成品率提高,需要图像传感器的高分辨率化、高响应性。
4.但是,在高分辨率并且高响应性的图像传感器的制作中,需要大量的开发费、开发时间。因此,在专利文献1中,通过将多个图像传感器并排并同时处理,实现高速的检测器。
5.在先技术文献
6.专利文献
7.专利文献1:jp专利5172162号公报
技术实现要素:
8.本发明的一实施方式所涉及的检查装置是通过对被检查体中的对象物的尺寸进行检测来检查所述被检查体的检查装置,具备:多个图像传感器,拍摄所述被检查体;照明装置,向所述被检查体照射光;和图像处理装置,根据所述多个图像传感器的输出,生成所述对象物的图像。所述图像处理装置基于所述多个图像传感器的输出,生成共同地包含所述被检查体的规定范围的图像的多个取入图像,按所生成的多个取入图像的每个取入图像,提取所述被检查体中的对象物的图像,针对所提取的所述对象物的图像彼此,基于该图像中显现的所述对象物的特征量来建立关联,将建立关联的所述对象物的图像彼此合成。
9.本发明的一实施方式所涉及的检查方法是通过使用检查装置来对所述被检查体中的所述对象物的尺寸进行检测,从而检查所述被检查体的检查方法,所述检查装置具备:多个图像传感器,拍摄被检查体;照明装置,向所述被检查体照射光;和图像处理装置,根据所述多个图像传感器的输出,生成所述被检查体中的对象物的图像,所述检查方法包含:基于所述多个图像传感器的输出,生成共同地包含所述被检查体的规定范围的图像的多个取入图像的步骤;按所生成的多个取入图像的每个取入图像,提取所述被检查体中的对象物的图像的步骤;针对提取出的所述对象物的图像彼此,基于该图像中显现的所述对象物的特征量来建立关联的步骤;和将建立关联的所述对象物的图像彼此合成的步骤。
附图说明
10.图1是本实施方式所涉及的检查装置的侧视图。
11.图2是本实施方式所涉及的检查装置的俯视图。
12.图3是表示本实施方式所涉及的摄像装置中的图像传感器的配置的例子的俯视图。
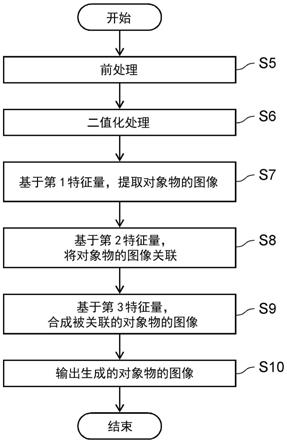
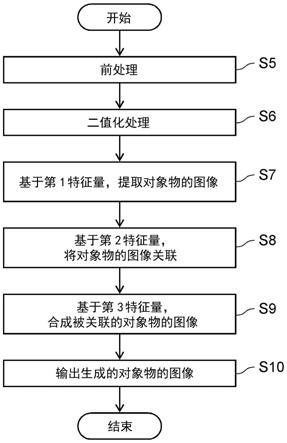
13.图4是用于对本实施方式所涉及的图像处理装置中的图像生成方法的流程进行说明的流程图。
14.图5a是用于对本实施方式所涉及的图像处理装置中的图像生成方法进行说明的图。
15.图5b是用于对本实施方式所涉及的图像处理装置中的图像生成方法进行说明的图。
16.图6a是用于对本实施方式所涉及的图像处理装置中的图像生成方法进行说明的图。
17.图6b是用于对本实施方式所涉及的图像处理装置中的图像生成方法进行说明的图。
18.图7是用于对本实施方式所涉及的图像处理装置中的对象物的图像的提取方法以及对象物的图像的合成方法的流程进行说明的流程图。
19.图8是用于对本实施方式所涉及的图像处理装置中的对象物的图像的合成方法进行说明的图。
20.图9a是表示本实施方式所涉及的检查装置输出的对象物的合成图像的图。
21.图9b是表示现有的检查装置输出的对象物的合成图像的图。
22.图10是用于对本实施方式所涉及的检查装置中的传感器的种类和动态图像的种类与光学系统的关系进行说明的图。
23.‑
符号说明
‑
24.1 摄像装置
25.2 照明装置
26.101~116 图像传感器
27.3~5 辊
28.6 旋转编码器
29.7 图像处理装置
30.8 传送带
31.9~10 驱动装置
32.pa~pd 取入图像
33.e 对象物。
具体实施方式
34.在专利文献1中,为了准确地进行对象物的检测,将从图像传感器输出的多个图像合成,生成高精细的图像。在专利文献1中,基于图像传感器的配置,将多个图像的位置分别偏移(修正)后,进行图像的合成。
35.但是,例如,在照明装置照射的光的方向不恒定的情况下、被检查体是立体等情况下,有时光对被检查体的照射方式不是恒定的。在这种情况下,担心在从图像传感器输出的
多个图像中,对象物的位置较大偏离。因此,通过基于图像传感器的配置来分别修正多个图像的位置,可能无法修正对象物的位置的偏离,不能检测对象物。
36.特别地,被检查体被输送时,进行被检查体的检查的情况下,容易产生对象物的位置的偏离。
37.本发明的目的在于,在使用了多个图像传感器的检查装置以及检查方法中,提高被检查体中的对象物的检测再现性以及检测概率。
38.以下,基于附图来对本发明的实施方式详细进行说明。以下的优选的实施方式的说明本质上仅仅为示例,完全并不意图限制本发明、其应用物或者其用途。
39.图1表示本实施方式所涉及的检查装置的侧视图,图2表示本实施方式所涉及的检查装置的俯视图。如图1以及图2所示,本检查装置具备:摄像装置1、照明装置2、辊3~5、旋转编码器6、图像处理装置7。在辊3~5的外周,卷绕传送带8。
40.本检查装置进行构成为片状的片材s(被检查体)的检查。具体地,本检查装置对片材s中的对象物进行检测。这里,作为对象物,本检查装置对片材s中的缺陷、异物进行检测。该缺陷中例如不仅包含检查对象的片材s中的短路、断线等片材s的生产时的欠缺部分或不足部分,也包含片材s的损伤(例如,片材s与其他构件接触所导致的划痕)等。本检查装置在检测出的对象物大于规定的尺寸的情况下,判断为片材s中包含对象物。片材s在被载置于传送带8的状态下,在图1以及图2的实线所示的箭头的方向上被输送。
41.摄像装置1具备多个图像传感器,对由传送带8输送的片材s进行拍摄。这里,摄像装置1在辊4、5之间,构成为拍摄片材s的线传感器。摄像装置1将从图像传感器输出的像素信号发送给图像处理装置7。另外,在以下的说明中,将摄像装置1的扫描方向设为x方向,将摄像装置1的副扫描方向设为y方向,将与x方向以及y方向垂直的方向设为z方向。
42.照明装置2具有例如包含led、激光、卤素光源等的光源,在辊4、5之间,对摄像装置1的扫描区域(片材s)进行光的照射。具体地,照明装置2被设置为使得光的照射方向相对于传送带8倾斜角度10
°
左右。即,摄像装置1以及照明装置2包含暗视场光学系统。
43.辊3通过驱动机构9而旋转,驱动传送带8,将片材s在附图的实线箭头方向输送。驱动机构9例如是与辊3连结的致动器。致动器例如是旋转电机。
44.辊5通过驱动机构10,使传送带8在x方向(图2中的虚线的箭头方向)以规定的速度蛇行。通过使传送带8在x方向蛇行,进行基于本检查装置的检查后的工序中的片材s的对位。驱动机构10例如是与辊5连结并使辊5在x方向往复运动的致动器。
45.旋转编码器6对辊4的旋转速度进行检测,对由传送带8输送的片材s的移动量进行检测。旋转编码器6将检测出的片材s的移动量发送给图像处理装置7。
46.图像处理装置7例如是计算机,基于从摄像装置1接收的像素信号以及旋转编码器6检测的片材s的移动量,通过后述的图像生成方法,生成多个取入图像。图像处理装置7通过后述的对象物的提取方法,从生成的多个取入图像提取对象物e的图像。图像处理装置7通过后述的图像合成方法,将提取的对象物e的图像合成,生成对象物e的合成图像。
47.(关于摄像装置)
48.图3是表示本实施方式所涉及的摄像装置中的图像传感器的配置的例子的俯视图。如图3所示,摄像装置1具备图像传感器101~116。图像传感器101~116分别包含多个像素。
49.这里,以图像处理装置7根据4个图像生成对象物的合成图像的情况为例来进行说明。在本实施方式中,合成图像中的1个像素的x方向上的分割数nx设为2,y方向上的分割数ny设为2。此外,构成图像传感器101~116的各像素的x方向上的分辨率x设为42.3νm,y方向上的分辨率y设为42.3μm。此外,图像传感器101~116分别x方向是432像素(18273.6μm),y方向是1像素(42.3μm)。为了提高对象物的检测精度,优选合成的多个图像是通过处于以小于1个像素的单位错开的位置的多个图像传感器而生成。分割数nx以多个图像传感器相对于作为基准的传感器(例如图像传感器101等)在x方向偏离多少为指标。例如,在分割数nx为2的情况下,是指2个图像传感器在x方向偏离1/2像素(0.5像素)偏离。同样地,分割数ny以多个图像传感器相对于作为基准的传感器(例如图像传感器101等)在y方向偏离多少为指标。例如,在分割数ny是2的情况下,是指2个图像传感器在y方向偏离1/2像素(0.5像素)。
50.图像传感器105以图像传感器101为基准而在y方向被配置于距离y1的位置。距离y1为y/ny a
×
y。a是系数(0以上的整数)。图像传感器105以图像传感器101为基准,配置为具有分辨率y的a倍加上0.5像素(y/ny)的距离。这里,a=94。因此,距离y1=3997.35μm。图像传感器105以图像传感器101为基准而在x方向被配置于相同的位置。
51.图像传感器109以图像传感器101为基准,被配置于在y方向距离y2、在x方向距离x1的位置。距离y2为0 b
×
y。即,图像传感器109以图像传感器101为基准,被配置为具有分辨率y的b倍的距离。“0”是指图像传感器109在y方向相对于图像传感器101以1像素的整数倍偏离,不包含小数点以下的端数的偏离。b是系数(0以上的整数)。这里,b=189。因此,距离y2=7994.7μm。此外,距离x1为x/nx c
×
x。c是系数(0以上的整数)。这里,c=0。因此,距离x1=21.15μm。
52.图像传感器113以图像传感器101为基准,被配置于在y方向距离y3、在x方向距离x1的位置。距离y3为y/ny d
×
y。d为系数(0以上的整数)。这里,d=283。因此,距离y3=11992.05μm。
53.通过以上的结构,图像传感器105被配置为相对于图像传感器101,在y方向偏离94.5像素。若忽略整数部分,则图像传感器105被配置为相对于图像传感器101,在y方向偏离0.5像素。图像传感器109被配置为相对于图像传感器101,在x方向偏离0.5像素。图像传感器113被配置为相对于图像传感器101,在x方向偏离0.5像素,在y方向偏离283.5像素。若忽略整数部分,则图像传感器113被配置为相对于图像传感器101,在x方向偏离0.5像素,在y方向偏离0.5像素。
54.同样地,图像传感器106、107、108以图像传感器102、103、104为基准,分别被配置为在y方向距离y1的位置。图像传感器110、111、112以图像传感器102、103、104为基准,分别被配置为在y方向距离y2、在x方向距离x1的位置。图像传感器114、115、116以图像传感器102、103、104为基准,分别被配置为在y方向距离y3、在x方向距离x1的位置。
55.此外,图像传感器102在x方向,被配置为一部分与图像传感器101重叠。这里,图像传感器102在x方向,与图像传感器101重叠423μm(10像素)。此外,在y方向,相对于图像传感器101,被配置于距离y4(本例中为21像素)的位置。因此,图像传感器102以图像传感器101为基准,被配置为在x方向17850.6μm(422像素)的距离、在y方向
‑
888.3μm(21像素)的距离。
56.图像传感器103被配置为在x方向,一部分与图像传感器102重叠。这里,图像传感器103在x方向,与图像传感器102重叠423μm(10像素)。此外,在y方向,相对于图像传感器
102,被配置于距离y4(21像素)的位置。因此,图像传感器103以图像传感器102为基准,被配置于在x方向17850.6μm(422像素)的距离、在y方向888.3μm(21像素)的距离。此外,在y方向,相对于图像传感器102,被配置于距离y4(21像素)的位置。图像传感器104在x方向,被配置为一部分与图像传感器103重叠。这里,图像传感器104在x方向,与图像传感器103重叠423μm(10像素)。此外,在y方向,被配置于相对于图像传感器103为距离y4(21像素)的位置。因此,图像传感器104以图像传感器103为基准,被配置于在x方向17850.6μm(422像素)的距离、在y方向
‑
888.3μm(21像素)的距离。
57.同样地,图像传感器106、110、114以图像传感器105、109、113为基准,分别被配置于在x方向422像素的距离、在y方向
‑
21像素的距离。图像传感器107、111、115以图像传感器106、110、114为基准,分别被配置于在x方向422像素的距离、在y方向21像素的距离。图像传感器108、112、116以图像传感器107、111、115为基准,分别被配置于在x方向422像素的距离、在y方向
‑
21像素的距离。
58.(关于取入图像的生成方法)
59.参照图1~图6b,对图像处理装置中的图像生成方法进行说明。图4是用于对图像处理装置中的图像生成方法的流程进行说明的流程图,图5a、图5b、图6a以及图6b是用于对图像处理装置中的图像生成方法进行说明的图。具体地,图5a是表示传送带上的标记位置的俯视图,图5b是基于来自摄像装置1的信号而生成的取入图像,图6a是在y方向偏移的取入图像,图6b是在x方向偏移的取入图像。
60.在步骤s1,图像处理装置7基于从摄像装置1接收的像素信号(从图像传感器101~116输出的像素信号)、以及旋转编码器6所检测的片材s的移动量,生成片材s的取入图像。
61.如图5a所示,在传送带8上,形成在x方向延伸的标记l1、l2。图像处理装置7接受图像传感器101~116输出的像素信号,生成处理前的取入图像(图像p1~p16)。另外,图像p1~p16是基于图像传感器101~116的各个像素信号而生成的图像。
62.在步骤s2,图像处理装置7以标记l1、l2为基准,将取入图像的y方向的位置偏移(修正)。如图5b以及图6a所示,图像处理装置7修正图像p1~p16的y方向的位置,以使得标记l1、l2的y方向的位置一致。
63.在步骤s3,基于图像传感器101~116的配置,将取入图像的x方向的位置偏移(修正)。如图6a以及图6b所示,基于图像传感器101~116的x方向的配置(x方向的重叠),将图像p1~p16的x方向的位置修正(偏移)。例如,图像传感器101、102在x方向相互重叠10像素,因此图像处理装置7将图像p1、p2在x方向重叠10像素。此时,图像p1、p2的重叠部分设为任意一方的亮度等级,或者设为将双方平均化的亮度等级。
64.这里,图像处理装置7将图像p1~p4、p5~p8、p9~p12、p13~p16分别在x方向重叠10像素。
65.在步骤s4,图像处理装置7在x方向重叠的图像p1~p4、p5~p8、p9~p12、p13~p16中,将以坐标原点oa、ob、oc、od分别为基准的规定区域(图6b中被点划线包围的区域)提取(生成)为取入图像pa、pb、pc、pd。坐标原点ob是相对于坐标原点oa在y方向偏移1/ny像素(这里,在y方向0.5像素)的点。坐标原点oc是相对于坐标原点oa在x方向偏移1/nx像素(这里,在x方向0.5像素)的点。坐标原点od是相对于坐标原点oa在x方向偏移1/nx像素以及在y方向偏移1/ny像素(这里,在y方向0.5像素以及在x方向0.5像素)的点。
66.通过以上的方法,图像处理装置7基于图像传感器101~116的像素信号,生成4个取入图像pa~pd。
67.(关于对象物的图像的提取方法以及对象物的图像的合成方法)
68.参照图1~图9b,对图像处理装置中的对象物的图像的提取方法以及对象物的图像的合成方法进行说明。图7是用于对图像处理装置中的对象物的图像的提取方法以及对象物的图像的合成方法的流程进行说明的流程图,图8是用于对图像处理装置中的对象物的图像的合成方法进行说明的图。
69.接下来,图像处理装置7基于取入图像pa~pd,进行对象物e的图像的提取以及合成。
70.在步骤s5,图像处理装置7对图像pa~pd,作为前处理而进行滤波处理。例如,图像处理装置7对图像pa~pd,进行中值滤波处理、平滑化滤波处理、比较差分滤波处理等强调对象物e(缺陷以及异物)的滤波处理或者去除基底的影响的滤波处理。
71.在步骤s6,图像处理装置7对图像pa~pd进行二值化处理。
72.在步骤s7,图像处理装置7基于对象物e的第1特征量,提取图像pa~pd中的对象物e的图像。例如,作为对象物e的第1特征量,使用对象物e的面积、最大长度、纵横比、纵宽度、横宽度、二值化阈值(亮度阈值)、亮度等级(最大值、最小值、平均值等)、费雷特直径(最大值、最小值等)、主轴的长度(最大值、最小值等)等。此外,图像处理装置7也可以将不包含对象物的片材s的图像数据用作为第1特征量,通过该图像数据与图像pa~pd的比较,提取对象物e的图像。此外,图像处理装置7也可以在照明装置2能够在一定方向照射光的情况下,将规定方向的光分量用作为第1特征量,在规定方向的光分量超过规定值的情况下,提取对象物e。
73.图像处理装置7在规定的像素以上包含对象物e的情况下,提取对象物e的图像。这里,图像处理装置7在2像素以上包含对象物e的情况下,提取对象物e的图像。
74.在步骤s8,图像处理装置7基于对象物e的第2特征量(特征量),进行提取的对象物e的图像的关联(建立关联)。作为对象物e的第2特征量,是对象物e的面积、纵横比、重心(面积重心、重心的亮度值等)、外接于对象物e的图像的矩形的中心或者重心、亮度等级(最大值、最小值、平均值等)、费雷特直径(最大值、最小值等)、主轴的长度(最大值、最小值等)等。这里,图像处理装置7基于对象物e的图像的重心(面积重心),进行对象物e的图像的关联。
75.如图8所示,图像处理装置7从图像pa提取对象物e1~e4,从图像pb提取对象物e5~e8,从图像pc提取对象物e9~e12,从图像pd提取对象物e13~e15。该情况下,图像处理装置7基于对象物e1~e15的各自的重心g1~g15,进行对象物e1~e15的图像的关联。具体地,图像处理装置7在将图像pa~pd重叠的情况下,将重心处于对应的位置的对象物e的图像关联。
76.这里,图像处理装置7在对象物e的重心位置处于规定范围的情况下,进行对象物e的图像的关联。规定范围优选是5像素(0.1mm)~50像素(1.0mm),这里,被设定为16像素(0.32mm)。但是,并不限定于此,也可以根据图像传感器101~116之间的距离设定而将规定范围设定得较大。
77.首先,在图8中,图像处理装置7进行图像pa的对象物e的图像与图像pb、pc、pd的对
象物e的图像的关联。具体地,由于重心g5、g9、g13存在于重心g1的规定范围内,因此图像处理装置7将对象物e1、e5、e9、e13的图像关联。由于重心g6、g10存在于重心g2的规定范围内,因此图像处理装置7将对象物e2、e6、e10的图像关联。由于重心g7存在于重心g3的规定范围内,因此图像处理装置7将对象物e3、e7的图像关联。
78.接下来,图像处理装置7进行图像pb的对象物的图像与图像pc、pd的对象物的图像的关联。由于重心g11、g15存在于重心g8的规定范围内,因此图像处理装置7将对象物e8、e11、e15的图像关联。
79.接下来,图像处理装置7进行图像pc的对象物的图像与图像pd的对象物的图像的关联。在图8中,由于图像pc、pd中,重心对应的对象物e的图像之中、未关联的对象物e不存在,因此图像处理装置7不进行对象物e的图像的关联。
80.步骤s9中,图像处理装置7基于第3特征量,进行对象物e的图像合成。作为对象物e的第3特征量,是对象物e的图像的面积、纵横比、重心以及外接于对象物e的图像的矩形的重心等。这里,图像处理装置7基于对象物e的图像的重心,进行对象物e的图像的图像合成。
81.具体地,图像处理装置7将提取的对象物e的图像尺寸在x方向以及y方向分别2倍化。并且,图像处理装置7针对被关联的对象物e的图像,以对象物e的图像的重心(第3特征量)为中心进行重叠,将每个像素的亮度等级相加,进行平均化。
82.例如,在图8中,由于对象物e1、e5、e9、e13的图像被关联,因此图像处理装置7基于4张图像,生成对象物e的图像。
83.在步骤s10,图像处理装置7输出所生成的对象物e的图像(例如,显示于图略的显示器等)。此时,图像处理装置7输出被合成的对象物e的图像,并且输出未关联的对象物e的图像。在图8中,作为被合成的对象物e的图像,图像处理装置7输出对象物e1、e5、e9、e13的合成图像、对象物e2、e6、e10的合成图像、对象物e8、e11、e15的合成图像,作为未关联的对象物e的图像,输出对象物e4的图像、对象物e12的图像、对象物e14的图像。图像处理装置7对关联的多个对象物的图像实施图像合成处理并生成合成图像,输出合成图像。另一方面,图像处理装置7对未关联的单独的对象物的图像跳过图像合成处理并将图像直接输出。例如,对象物e4的图像不与图像pb~pd的对应的区域的图像(不存在对象物的基底图像)合成,直接被输出。对象物e4的图像的画质比对象物e4的图像与基底图像的合成图像的画质高。通过将对象物e4的图像直接输出,能够提高对象物e4的检测精度。
84.图9a以及图9b是对本实施方式所涉及的检查装置以及现有的检查装置输出的对象物的合成图像进行比较的图。具体地,图9a是本实施方式所涉及的检查装置输出的对象物的合成图像,图9b是现有的检查装置输出的对象物的合成图像。
85.在现有的检查装置中,图像处理装置7通过上述的取入图像的生成方法,生成取入图像pa~pd。图像处理装置7基于图像传感器101~116的配置将取入图像pa~pd的x方向以及y方向的位置偏移(修正),合成取入图像pa~pd的基础上,提取对象物e的图像。
86.如图9a以及图9b所示,相比于现有的检查装置,本实施方式所涉及的检查装置输出的对象物e的图像更加清楚。在现有的检查装置中,进行基于图像传感器的配置的偏移(修正),但不考虑光对被检查体的照射方式,因此被合成的每个取入图像的对象物e的图像的位置偏离,对象物e的合成图像变得不清楚。与此相对地,在本实施方式中,按照每个取入图像提取对象物e的图像之后,以对象物e的重心为中心,合成被提取的对象物e的图像。由
此,能够抑制被合成的对象物e的图像的位置的偏离,因此能够使对象物e的合成图像清楚。
87.通过以上的结构,本检查装置通过检测片材s中的对象物e的尺寸,来检查片材s。本检查装置具备:拍摄片材s的图像传感器101~116、向片材s照射光的照明装置2、根据图像传感器101~116的输出来生成对象物e的图像的图像处理装置7。图像处理装置7基于来自图像传感器101~116的输出,生成共同地包含片材s的规定范围的图像的取入图像pa~pd。图像处理装置7按照生成的每个取入图像pa~pd,提取片材s中的对象物e的图像。图像处理装置7基于该图像中显现的对象物e的重心(特征量),将提取的对象物e的图像彼此关联(建立关联)。然后,图像处理装置7将关联的对象物e的图像彼此合成。
88.根据本公开的一方式,如以下所示,在使用了多个图像传感器的检查装置以及检查方法中,能够准确地检测被检查体中的对象物的尺寸(大小),因此能够提高被检查体中的对象物的检测再现性以及检测概率。
89.在基于图像传感器101~116的配置,合成取入图像pa~pd的情况下,担心根据光对片材s的照射方式,每个取入图像pa~pd的对象物e的位置较大偏离。因此,担心通过基于图像传感器的位置的取入图像pa~pd的修正,不能修正对象物e的位置的偏离,不能检测对象物e。与此相对地,在本检查装置中,对象物e的图像是按照每个取入图像pa~pd而被提取的,提取的对象物e的图像彼此基于特征量而被建立关联并合成。由此,能够抑制每个取入图像pa~pd的对象物e的位置的偏离,因此能够准确地进行对象物e的图像的合成,能够准确地检测被检查体中的对象物的尺寸(大小)。因此,能够提高被检查体(片材s)中的对象物(异物或者缺陷)的检测再现性以及检测概率。
90.此外,图像处理装置7不将未关联(未建立关联)的对象物e的图像与其他对象物e的图像合成而输出。由此,能够提高被检查体(片材s)中的对象物的检测再现性以及检测概率。
91.此外,图像传感器101~116分别将x方向的分辨率设为x,将y方向的分辨率设为y。该情况下,图像传感器101~104、105~108、109~112、113~116分别在x方向按照每(1/nx) mx像素排列配置。图像传感器101、105、109、113在y方向按照每(1/ny) py像素排列配置。图像传感器102、106、110、114在y方向按照每(1/ny) py像素排列配置。图像传感器103、107、111、115在y方向按照每(1/ny) py像素排列配置。图像传感器104、108、112、116在y方向按照每(1/ny) py像素排列配置。其中,nx是x方向上的像素的分割数,ny是y方向上的像素的分割数,m、p是整数的系数。由此,1个像素在x方向被分割为分割数nx,在y方向被分割为分割数ny,因此能够提高摄像装置的x方向以及y方向的分辨率。
92.(其他的实施方式)
93.如以上那样,作为本技术中公开的技术的示例,对实施方式进行了说明。但是,本公开中的技术并不局限于此,也能够适用于适当进行了变更、置换、附加、省略等的实施方式。
94.另外,在上述实施方式中,摄像装置1以及照明装置2由暗视场光学系统构成,也可以由明视场光学系统构成。此外,摄像装置1构成为线传感器,但也可以构成为区域传感器。此外,图像处理装置7可以根据从图像传感器101~116输出的像素信号生成动态图像,也可以生成静止图像。
95.图10是用于对本实施方式所涉及的检查装置中的传感器的种类、动态图像的种
类、光学系统的关系进行说明的图。将摄像误差为设定分辨率以上表示为a,将摄像误差小于设定分辨率~设定分辨率的十分之一以上表示为b,将摄像误差小于设定分辨率的十分之一表示为c。如图10所示,本检查装置在摄像装置1以及照明装置2在由暗视场光学系统构成的情况下,能够生成最清楚的对象物e的合成图像。这是由于通过低角度地进行照明,对象物的基底(地面等级)不被照射光(不存在异物的位置的基底的明亮度为低等级),对象物照射光,因此sn(信号噪声(异物的亮度/基底的亮度))比提高。另外,即使照明装置2由明视场光学系统构成,也能够得到与本检查装置同样的效果,即使从图像传感器生成动态图像也能够得到同样的效果。
96.此外,摄像装置1的图像传感器并不局限于上述配置。此外,摄像装置1的图像传感器的数量并不局限于上述数量。
97.此外,构成各图像传感器的像素数并不局限于上述的像素数。
98.此外,图像处理装置7生成的取入图像并不局限于4张。图像处理装置7生成至少2张取入图像即可。
99.此外,本检查装置所检查的被检查体并不局限于构成为片状。
100.产业上的可利用性
101.本发明的检查装置能够用于半导体、电子设备、二次电池等中使用的构件所包含的异物、缺陷等的检查。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。