1.本发明涉及一种方法、一种具有指令的计算机程序以及一种装置,该方法、计算机程序和装置用于控制用于交通工具(fortbewegungsmittel,或者说前行工具)的增强现实平视显示器的显示(或者说显示内容)。此外,本发明涉及一种交通工具,在该交通工具中使用按照本发明的方法或按照本发明的装置。
背景技术:
2.随着虚拟现实和增强现实技术和应用的不断发展,它们也用于机动车和其它交通工具。增强现实(英语:augmented reality,缩写ar;德语:“erweiterte”)是通过虚拟元素对真实世界的丰富,这些虚拟元素在三维空间中位置正确地注册并且允许实时交互。由于在德语地区的学术界中,表述“augmented reality”相比于表述“erweiterte
ꢀ”
已得到认可,因此在下文中使用前者。表述“混合现实(mixed reality)”也作为同义词使用。
3.平视显示器(hud)提供一种可能的技术实现方案,以便相应地通过透视正确(perspektivisch korrekt)的、模拟接触(kontaktanalog)的虚拟扩展来丰富驾驶员驾驶位置。在此,安装在仪表板中的显示器的光线通过多个镜面和透镜被折叠并且通过投影面反射到驾驶员的眼睛中,从而驾驶员感知到交通工具外部的虚拟图像。在汽车领域中,前挡风玻璃通常用作投影面,在显示时必须考虑前挡风玻璃的弯曲形状。作为备选,部分地也使用由玻璃或塑料制成的附加板(scheibe),该附加板在驾驶员和前挡风玻璃之间布置在仪表板上。通过显示内容和驾驶场景的视觉叠加,需要较少的头部和眼睛的移动来读取信息。此外,用于眼睛的适应耗费减少,因为根据显示的虚拟距离需要较少地调节甚至完全不需要调节。
4.增强现实提供了用于通过模拟接触地标记车行道和对象来辅助驾驶员的各种应用可能性。相对容易想到的示例大多数涉及导航领域。传统的导航显示在传统的hud中通常显示示意图,例如向右直角地延伸的箭头作为应当在下个时机向右转弯的符号,而ar显示提供明显更有效的可能性。由于这些显示可以作为“环境的一部分”示出,因此可以例如直接在真实的参考位置处非常有效地向驾驶员呈现导航提示或危险警告。
5.j.l.gabbard等人的文章:“behind the glass:driver challenges and opportunities for ar automotive applications”[1]研究了在汽车应用中集成增强现实的挑战。对环境的驾驶相关信息的覆盖(也称为遮挡)是模拟接触的ar显示的主要缺点之一。增强现实平视显示器显示在与驾驶直接相关的区域中的信息。因此,平视显示器中的每个显示都可能隐藏关键信息、例如车行道上的障碍物。该效应被增加的杂乱、即元素在较小空间上的堆积放大。
[0006]
关于图像信息的叠加显示,专利文献de 10 2012 020 568a1描述了一种用于运行机动车的导航装置的方法。在该方法中,导航装置的适配装置接收至少一个测量参量传感器的信号,该信号涉及机动车的环境的物理或化学特性或物质状况,该物理或化学特性或
物质状况能被环境中的机动车的驾驶员视觉地感知。根据该信号产生逼真的环境图像,在该图像中再现了借助信号识别的环境的特性或状况。将逼真的环境图像与环境地图相结合,并且将由此产生的组合图像传输至显示装置。
技术实现要素:
[0007]
本发明所要解决的技术问题是提供用于控制用于交通工具的增强现实平视显示器的显示的解决方案,这些解决方案使得可以减少由于对驾驶相关信息的覆盖而导致的缺点。
[0008]
所述技术问题通过方法、通过具有指令的计算机程序并且通过装置解决。
[0009]
根据本发明的第一方面,用于控制用于交通工具的增强现实平视显示器的显示的方法包括如下步骤:
[0010]
‑
确定至少一个与安全相关的参数;并且
[0011]
‑
根据所述至少一个与安全相关的参数调整(或者说适配)待由所述增强现实平视显示器示出的显示元素的强度。
[0012]
根据本发明的另外的方面,计算机程序包含指令,这些指令在由计算机执行时使计算机实施以下用于控制用于交通工具的增强现实平视显示器的显示的步骤:
[0013]
‑
确定至少一个与安全相关的参数;并且
[0014]
‑
根据所述至少一个与安全相关的参数调整待由所述增强现实平视显示器示出的显示元素的强度。
[0015]
术语“计算机”在此应当宽泛地理解。计算机尤其还包括控制设备、嵌入式系统和其它基于处理器的数据处理装置。
[0016]
该计算机程序可以例如被提供用于电子调取,或者可以存储在计算机可读的存储介质上。
[0017]
根据本发明的另外的方面,用于控制用于交通工具的增强现实平视显示器的显示的装置具有:
[0018]
‑
分析模块,用于确定至少一个与安全相关的参数;和
[0019]
‑
控制模块,用于根据所述至少一个与安全相关的参数调整待由增强现实平视显示器示出的显示元素的强度。
[0020]
在按照本发明的解决方案中,动态地减少由显示元素引起的遮挡或遮盖。根据对于安全关键的参数减小显示元素的强度。为此可以例如调节显示元素的不透明度,或者可以调整显示元素的被图像元素占据的面积份额。在不减少遮挡的情况下,由于增强现实显示,例如具有恒定高的强度的位于远处的转弯箭头在接近时会变得越来越大并且因此导致严重的覆盖。为了避免对驾驶相关信息的覆盖,可以将示出的显示元素减少为轮廓线。但在试验中发现,在高的环境亮度下不能确保这种减少为轮廓线的显示元素的可见性。此外可以限制示出的显示元素的尺寸,使得显示元素只增大至一定尺寸。然而这抑制了增强现实效果。与此相反,借助于描述的解决方案,由增大引起的遮挡增加通过减小强度来补偿。因此,只当遮挡是严重的或有问题时,减小显示元素的显著性。为了使显示能被感知,需要相对于环境的足够的显著性。因此产生在可感知性和遮挡减少之间的折衷。
[0021]
根据本发明的一个方面,所述至少一个与安全相关的参数是所述交通工具相对于
目标元素的距离或者是直至与所述目标元素碰撞的时间。被显示元素遮盖的较小的、不可移动的对象、例如儿童可以视为特别关键的情况。这种情况最可能出现在城市环境中。当显示元素最大时、即当在虚拟的显示元素和本交通工具之间的距离较小时,由显示元素引起的遮挡是最关键的。为了使驾驶员能够对潜在地被遮盖的障碍物做出反应,应当在低于临界距离的情况下减小遮盖。该临界距离与本交通工具的速度有关,其中,直至碰撞的时间通常用作安全指标。对于城市环境,直至碰撞的时间为1.5s的值可以被认为是可接受的。但在某些情况下,完全依赖对直至碰撞的时间的考虑是不够的。否则可能在交通缓慢的情况下、例如在交通高峰时间导致非常迟地减少遮挡。因此有意义的是,也通过距离影响强度。
[0022]
根据本发明的一个方面,在调整强度时考虑显示元素的尺寸。例如,对强度的调整可以限于例如关于高度、宽度或面积具有某个最小尺寸的显示元素。以此方式排除原本就不会引起有问题的遮挡的显示元素。此外,在确定了以下距离时可以考虑显示元素的尺寸,在低于该距离时应该对强度进行调整。
[0023]
根据本发明的一个方面,所述交通工具相对于目标元素的距离和直至与目标元素碰撞的时间均被确定,并且选择更关键的参数用于对显示元素的强度的调整。将时间参数包括在内确保了与速度相关的遮挡减少。这样可以确保有足够的时间来做出反应和制动。例如,在自身速度为150km/h的情况下,相对较小的显示元素可能由于模拟接触的显示遮盖位于远处的障碍物,因此在只基于距离或显示元素的尺寸的解决方案中不能确保足够的用于反应和制动的时间。而与时间相关的解决方案确保障碍物不被覆盖。
[0024]
根据本发明的一个方面,所述强度能根据所述至少一个与安全相关的参数在标称(nominell)强度的100%至0%之间进行调整。分别根据显示元素的设计可以规定,显示元素由具有不同标称强度的多个部分构成。例如,一个虚拟路标可以由三个并排布置的方向箭头构成,这三个方向箭头具有100%、70%和50%的强度。因此,为了简化对强度的调整适宜的是,分别确定标称强度的按百分比的调整。
[0025]
根据本发明的一个方面,所述显示元素的强度根据所述至少一个与安全相关的参数只被降低,但不被重新提高。以此方式防止例如在剧烈的制动过程中强度的波动。如果显示元素的强度在给定情况下只受直至碰撞的时间影响,则这在驾驶员快速接近交叉路口但随后变慢的情况下会导致波动,因为直至碰撞的时间重新增大。因此,强度至少由直至碰撞的时间只单向地影响、即只下降。如果直至碰撞的时间在减小之后重新增大,则强度保持在目前为止的水平并且只当直至碰撞的时间下降到先前的较低值以下时才再次减小。
[0026]
根据本发明的一个方面,所述显示元素的轮廓线保持不变地可见。由于显示元素的轮廓线太细而不会遮盖环境对象,因此这些轮廓线可以没有问题地保持恒定地可见。由此同时确保了由显示元素提供的信息的连续可见性和可理解性。
[0027]
根据本发明的一个方面,用于根据所述至少一个与安全相关的参数对显示元素的强度进行调整的函数是能被调整的。例如可以基于显示元素的尺寸来调整函数,以便例如确定这样的距离,在低于该距离时应该对强度进行调整。这些函数同样可以是能由交通工具的用户调整的,该用户因此可以根据其个人喜好调整显示元素的显示。此外存在这样的可能性,即这些函数能由交通工具或增强现实平视显示器的制造商调整。制造商因此可以对修改的规章或交通研究的结果做出反应。
[0028]
根据本发明的一个方面,所述显示元素是导航提示或警告提示。由于这些类型的
显示元素在模拟接触的显示中特别频繁地使用,因此按照本发明的解决方案的应用适合于这类显示元素。
[0029]
根据本发明的一个方面,所述目标元素是障碍物或交叉路口。在导航提示的情况下,目标元素通常是放置有导航提示的交叉路口。而警告提示通常用于障碍物、例如物体、其它交通参与者或道路损坏部位。
[0030]
按照本发明的方法或按照本发明的装置特别有利地用在(部分)自主或手动控制的交通工具中。交通工具尤其可以是机动车,但也可以是轮船、飞行器、例如飞行车(volocopter)等。
附图说明
[0031]
本发明的其它特征由以下描述和所附权利要求结合附图得出。在附图中:
[0032]
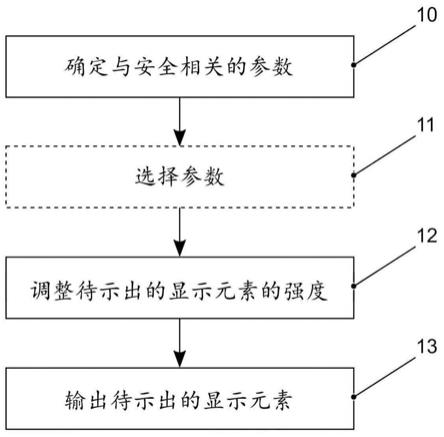
图1示意性地示出用于控制用于交通工具的增强现实平视显示器的显示的方法;
[0033]
图2示出用于控制用于交通工具的增强现实平视显示器的显示的装置的第一实施方式;
[0034]
图3示出用于控制用于交通工具的增强现实平视显示器的显示的装置的第二实施方式;
[0035]
图4示意性示出交通工具,在该交通工具中实现按照本发明的解决方案;
[0036]
图5示意性地示出用于交通工具的增强现实平视显示器的一般性结构;
[0037]
图6示意性地示出与交通工具有较大距离的显示元素的第一实施例;
[0038]
图7示意性地示出与交通工具有较小距离的显示元素的第一实施例;
[0039]
图8示意性地示出与交通工具有较大距离的显示元素的第二实施例;
[0040]
图9示意性地示出与交通工具有较小距离的显示元素的第二实施例;
[0041]
图10示意性地示出显示元素的强度和直至与目标元素碰撞的时间的相关性的函数图;
[0042]
图11示意性地示出显示元素的强度与相对于目标元素的距离的相关性的函数图。
具体实施方式
[0043]
为了更好地理解本发明的原理,以下根据附图更详细地阐述本发明的实施方式。当然,本发明不限于这些实施方式,并且描述的特征还能够被结合或修改,只要不脱离本发明的在所附权利要求中限定的保护范围即可。
[0044]
图1示意性地示出用于控制交通工具的增强现实平视显示器的显示的方法。在第一步骤中,确定10至少一个与安全相关参数。所述与安全相关的参数可以例如是交通工具相对于目标元素的距离或者直至与目标元素碰撞的时间。目标元素可以例如是障碍物或交叉路口。针对两个或更多的与安全相关的参数被确定10的情况,可以可选地选择11所确定的参数之一作为更关键的参数。随后,待由增强现实平视显示器示出的显示元素、例如导航提示或警告提示的强度根据至少一个与安全相关的参数被调整12,其中还可以考虑显示元素的尺寸。例如可以调节显示元素的不透明度,或者可以调整显示元素的被图像元素占据的面积份额。为此使用的函数可以是能调整的,例如由交通工具的用户或者制造商进行调整。强度能够有利地在标称强度的100%至0%之间进行调整。在此,显示元素的轮廓线保持
优选不变地可见。有利地只降低强度,但不重新提高强度。最后,待示出的显示元素被输出13,以便由增强现实平视显示器进行显示。
[0045]
图2示出用于控制交通工具的增强现实平视显示器的显示的装置20的第一实施方式的简化示意图。装置20具有输入端21,通过该输入端接收信息,分析模块22由这些信息确定至少一个与安全相关的参数p。例如,这些信息是摄像机43的图像数据、传感器系统44的数据或者导航系统45的数据。传感器系统44可以例如具有激光扫描仪或立体摄像机,用于检测交通工具的环境中的对象。同样可以通过输入端21直接接收先前已由外部部件确定的与安全相关的参数。所述与安全相关的参数p可以例如是交通工具相对于目标元素的距离或者直至与目标元素碰撞的时间。目标元素可以例如是障碍物或交叉路口。针对由分析模块22确定两个或更多的与安全相关的参数的情况,可以可选地由分析模块22选择所确定的参数之一作为更关键的参数。控制模块23设置用于,根据至少一个与安全相关的参数p来调整待由增强现实平视显示器示出的显示元素、例如导航提示或警告提示的强度,其中还可以考虑显示元素的尺寸。例如可以调节显示元素的不透明度,或者可以调整显示元素的被图像元素占据的面积份额。为此使用的函数可以是能调整的,例如由交通工具的用户或者制造商进行调整。强度能够有利地在标称强度的100%至0%之间进行调整。在此,显示元素的轮廓线保持优选不变地可见。有利地只降低强度,但不重新提高强度。通过装置20的输出端26可以输出待示出的显示元素,例如以图像数据的形式或者以用于增强现实平视显示器的控制设备42的控制信号的形式输出,以便由增强现实平视显示器进行显示。
[0046]
分析模块22和控制模块23可以由监控模块24控制。通过用户接口(或者说用户界面)27可以在必要时改变分析模块22、控制模块23或监控模块24的设置。在装置20中产生的数据可以在需要时存储在装置20的存储器25中,以便例如进行后续评估或者由装置20的部件使用。分析模块22、控制模块23和监控模块24可以实现为专用硬件、例如实现为集成电路。然而它们当然也可以部分或完全地组合或作为软件被实施,所述软件在合适的处理器、例如在cpu或gpu上运行。输入端21和输出端26可以实施为分开的接口或组合的双向接口。在描述的示例中,装置20是独立的部件。但该装置同样可以集成在增强现实平视显示器装置的控制设备42中。
[0047]
图3示出用于控制交通工具的增强现实平视显示器的显示的装置30的第二实施方式的简化示意图。装置30具有处理器32和存储器31。装置30例如是计算机或控制设备。在存储器31中存储有指令,这些指令在由处理器32执行时使装置30实施根据所述方法之一的步骤。因此,存储在存储器31中的指令体现能够由处理器32执行的程序,该程序实现按照本发明的方法。装置30具有输入端33,用于接收信息、例如导航数据或关于交通工具的环境的数据。由处理器32生成的数据通过输出端34提供。此外,这些数据能够被存储在存储器31中。输入端33和输出端34可以组合成双向接口。
[0048]
处理器32可以包括一个或多个处理器单元、例如微处理器、数字信号处理器或其组合。
[0049]
所述实施方式的存储器25、31可以既具有易失的存储区域也具有不易失的存储区域,并且包括不同的存储设备和存储介质,例如硬盘、光学存储介质或半导体存储器。
[0050]
以下要借助图4至图11描述本发明的优选实施方式。在该实施方式中,增强现实平视显示器安装在机动车中。当然,按照本发明的解决方案不限于该应用。增强现实平视显示
器也可以安装在其它类型的交通工具中。
[0051]
图4示意性示出交通工具40,在该交通工具中实现按照本发明的解决方案。在该示例中,交通工具40是机动车。该机动车具有带有所属的控制设备42的增强现实平视显示器41。该机动车还具有用于控制增强现实平视显示器41的显示的装置20。装置20当然也可以集成在增强现实平视显示器41中或者在增强现实平视显示器41的控制设备42中。机动车的另外的部件是用于检测对象的摄像机43和传感器系统44、导航系统45、数据传输单元46和一系列辅助系统47,其中一个辅助系统示范性地示出。借助于数据传输单元46可以建立与服务提供商的连接,例如用于调取地图数据。为了存储数据存在存储器48。在机动车的不同部件之间的数据交换通过网络49进行。
[0052]
图5示意性地示出用于交通工具40、在该情况下为机动车的增强现实平视显示器41,借助于该增强现实平视显示器可以将内容显示在交通工具40的投影面53上、例如前挡风玻璃上或者由玻璃或塑料制成的附加板上,该附加板在驾驶员和前挡风玻璃之间布置在仪表板上。显示的内容由成像单元50产生并且借助于光学模块51投影到投影面53上。在机动车中,该投影在此通常发生在前挡风玻璃的位于方向盘上方的区域中。借助于光学模块51的光学部件52可以调整增强现实平视显示器41的眼动范围(eyebox)的位置。成像单元50可以例如是lcd
‑
tft显示器。增强现实平视显示器41通常安装在机动车的仪表板中。
[0053]
图6示意性地示出与交通工具有较大距离的显示元素60的第一实施例。在该实施例中,显示元素60是放置在环境中的路标,该路标被显示在增强现实平视显示器的视场64(fov:field of view)中。该路标在目标元素61的位置处垂直于车行道定位并且由三个并排定位的箭头元素构成,这些箭头元素指向机动的方向。目标元素61此处是交叉路口,所述机动应该在该交叉路口处进行。在所示的示例中,每个箭头元素本身又由单独的图像元素63构成,此处由完全被填充的三角形构成。最接近目标道路的左边的箭头元素的三角形具有100%的强度。中间的箭头元素具有70%的强度,并且右边的箭头元素具有50%的强度。各个单独的三角形分别由轮廓线62限定边界。被填充的三角形的不同强度通过使用不同的阴影线表示。在该实施方式中,这些强度由填充部的不透明度形成。
[0054]
图7示意性地示出与交通工具有较小距离的显示元素60的第一实施例。该显示元素60又是已经在图6中示出的路标。类似于真实的对象,路标或箭头元素在接近时变大,由此产生对放置在环境中的对象的希望的印象。这可能导致对驾驶场景的明显遮盖,这可能引起尤其对行人而言潜在有危险的情况。此外,由于变得越来越大的路标引起的光强在某个时间点可能超出在考虑功能上的安全性的范畴内确定的阈值。这可能导致增强现实平视显示器完全无效。因此,根据与安全相关的参数调整被填充的三角形的强度,即降低不透明度,这又由阴影线表示。显示元素60的轮廓线62在此保持恒定可见,因为这些轮廓线一方面太细而不会遮盖环境对象,并且另一方面确保了转弯信息的连续可见性和可理解性。为了避免不希望的副作用并且改善箭头元素的可见性和可解释性,有意义的可能是,与目前为止使用这类路标的应用相比,选择箭头元素的更大的标称强度和更尖锐的角度。
[0055]
图8示意性地示出与交通工具有较大距离的显示元素60的第二实施例。该显示元素60又是显示在增强现实平视显示器的视场64中的路标,该路标由三个并排定位的箭头元素构成,这些箭头元素指向机动的方向。在所示的示例中,每个箭头元素本身又由单独的图像元素63构成,此处由部分被填充的三角形构成。最接近目标道路的左边的箭头元素的三
角形具有100%的强度。中间的箭头元素具有70%的强度,并且右边的箭头元素具有50%的强度。各个单独的三角形分别由轮廓线62限定边界。在该实施方式中,不同的强度由显示元素60的被图像元素63占据的面积份额形成。
[0056]
图9示意性地示出与交通工具有较小距离的显示元素60的第二实施例。该显示元素60又是已经在图8中示出的路标。为了避免可能由于在接近时路标变大和与之伴随的不断增加的遮挡产生的危险情况,在该实施方式中也根据与安全相关的参数调整三角形的强度。然而,在这种情况下减小显示元素60的被图像元素63占据的面积份额。各个单独的三角形的填充部分的不透明度在此保持不变。当然也可以将两种方法结合,即额外地也调整不透明度。
[0057]
各个单独的三角形的强度优选既作为在本交通工具和目标元素、即虚拟路标的位置之间的距离的函数又作为直至与虚拟路标碰撞的时间的函数被减小。强度的调整可以例如根据以下逻辑进行:
[0058]
如果(f
强度
(t)<f
强度
(d)){//确定较低值
[0059]
要使用的强度=f
强度
(t);
[0060]
}
[0061]
否则{
[0062]
要使用的强度=f
强度
(d);
[0063]
}
[0064]
如果(要使用的强度<当前强度){//确保强度下降
[0065]
当前强度=要使用的强度;
[0066]
}
[0067]
在此,f
强度
(t)描述和直至与目标元素碰撞的时间相关的强度,并且f
强度
(d)描述与在本交通工具和目标元素之间的距离相关的强度。当前强度是当前用于显示单独的三角形的强度。
[0068]
图10示意性地示出显示元素的强度和直至与目标元素碰撞的时间t的相关性的函数图。对于城市环境,直至碰撞的时间为1.5s的值可以被认为是可接受的。相应地,强度在第一时间值t1(例如t1=3.83s)和第二时间值t2(例如t2=1.50s)之间从最大值f
最大
逐渐减小到0%。针对显示元素由多个具有不同标称强度的元素、例如上述路标的三个箭头构成的情况,可以为每个元素设置不同的最大值f
最大
。备选地可以使用唯一的最大值f
最大
。该最大值可以随后例如针对每个元素乘以与标称强度相应的修正因数。优选地,该函数图是可调整的,尤其关于时间t1和t2可调整。此外,曲线在两个时间点之间的走向也可以是可调整的。
[0069]
图11示意性地示出显示元素的强度与相对于目标元素的距离d的相关性的函数图。例如,强度可以在第一距离d1(例如d1=12.7m)和第二距离d2(例如d2=5m)之间从最大值f
最大
逐渐降低到0%。在此,变量d2可以定义为显示元素达到等于视场高度的65%的高度的那个距离,即在该距离处显示元素达到具有遮挡特征的临界尺寸。在这种情况下,距离d2与显示元素的具体设计有关。变量d1可以与d2相关地定义,例如形式为d1=d2 7.7m。优选地,该函数图是可调整的,尤其关于距离d1和d2可调整。此外,曲线在两个时间点之间的走向也可以是可调整的。
[0070]
在低速的情况下可能出现的是,直至碰撞的时间大于t1,这导致f
最大
的强度,而距
离已经小于d2,这导致0%的强度。在这样的情况下应当总是选择更关键的参数,在该情况下为距离。因此,强度被设置为0%。
[0071]
显示元素或组成显示元素的图像元素的轮廓或轮廓线优选保持100%的不透明度,直到整个显示元素逐渐隐去。例如,一旦显示元素已达到其最大尺寸,就可以以500ms的动画时长逐渐隐去整个显示元素。显示元素的高度不允许超出视场的高度。同样,围绕显示元素的各个单独的元素、例如上述路标的三个箭头的边界框不允许超出视场的宽度。达到最大尺寸时的距离和动画的时长优选均是可调整的。
[0072]
参考文献
[0073]
[1]j.l.gabbard等人:“behind the glass:driver challenges and opportunities for ar automotive applications”,《proceedings of the ieee》,第102卷(2014年),第124
‑
136页。
[0074]
附图标记列表
[0075]
10
ꢀꢀ
确定与安全相关的参数
[0076]
11
ꢀꢀ
选择参数
[0077]
12
ꢀꢀ
调整待示出的显示元素的强度
[0078]
13
ꢀꢀ
输出待示出的显示元素
[0079]
20
ꢀꢀ
装置
[0080]
21
ꢀꢀ
输入端
[0081]
22
ꢀꢀ
分析模块
[0082]
23
ꢀꢀ
控制模块
[0083]
24
ꢀꢀ
监控模块
[0084]
25
ꢀꢀ
存储器
[0085]
26
ꢀꢀ
输出端
[0086]
27
ꢀꢀ
用户接口
[0087]
30
ꢀꢀ
装置
[0088]
31
ꢀꢀ
存储器
[0089]
32
ꢀꢀ
处理器
[0090]
33
ꢀꢀ
输入端
[0091]
34
ꢀꢀ
输出端
[0092]
40
ꢀꢀ
交通工具
[0093]
41
ꢀꢀ
增强现实平视显示器
[0094]
42
ꢀꢀ
增强现实平视显示器的控制设备
[0095]
43
ꢀꢀ
摄像机
[0096]
44
ꢀꢀ
传感器系统
[0097]
45
ꢀꢀ
导航系统
[0098]
46
ꢀꢀ
数据传输单元
[0099]
47
ꢀꢀ
辅助系统
[0100]
48
ꢀꢀ
存储器
[0101]
49
ꢀꢀ
网络
[0102]
50
ꢀꢀ
成像单元
[0103]
51
ꢀꢀ
光学模块
[0104]
52
ꢀꢀ
光学部件
[0105]
53
ꢀꢀ
投影面
[0106]
60
ꢀꢀ
显示元素
[0107]
61
ꢀꢀ
目标元素
[0108]
62
ꢀꢀ
轮廓线
[0109]
63
ꢀꢀ
图像元素
[0110]
64
ꢀꢀ
视场
[0111]
d
ꢀꢀꢀ
距离
[0112]
p
ꢀꢀꢀ
参数
[0113]
t
ꢀꢀꢀ
时间
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。