1.本发明涉及物联网技术领域,更具体地说,它涉及基于物联网的多视角目标识别方法及系统。
背景技术:
2.随着物联网应用技术的不断发展,很多应用场景下需要根据拍摄到的图像快速识别出目标对象,例如人脸识别,就对识别的速度和准确度都提出了很高的要求。
3.目前,对于目标对象的识别主要是将拍摄终端拍摄的视频或图片上传至云端服务器,由云端服务器对其进行图像处理以及目标对象识别后,将识别结果返回给拍摄终端。而云端服务器进行图像处理时一般情况是基于单一拍摄终端拍摄的视频或图片进行处理,然后经过三维重建技术将二维图像投影到三维图像得到目标对象的三维信息,从而完成目标识别。然而,拍摄终端拍摄的视频或图片时在视角范围内的精度存在一定的差异,例如目标图像中与视角范围中部所对应的图像区域准确度高于两侧的精度,这就导致对于目标图像的识别存在一定的差异。此外,部分目标对象识别技术将多个视点所获取的目标图像进行融合以此来削弱视角差异,但是在图像融合过程中可能导致本身精度较高的图像区域发生偏差,其可靠性有待进一步提升。
4.因此,如何研究设计一种基于物联网的多视角目标识别方法及系统是我们目前继续解决的问题
技术实现要素:
5.为解决现有目标识别技术的存在识别差异和可靠性较差的问题,本发明的目的是提供基于物联网的多视角目标识别方法及系统,能够对多个目标图像进行精准匹配融合,识别准确度高,图像融合数据计算量低,有效提升了图像识别效率,为目标对象快速、准确的识别提供了基础。
6.本发明的上述技术目的是通过以下技术方案得以实现的:
7.第一方面,提供了基于物联网的多视角目标识别方法,包括以下步骤:
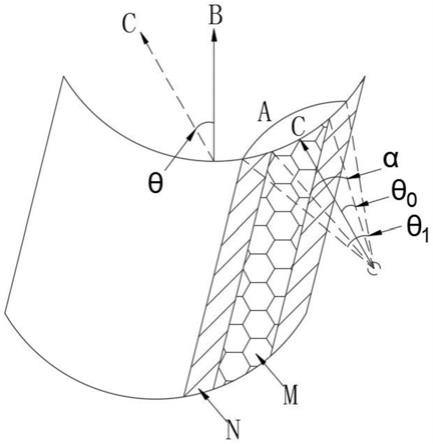
8.s101:获取多个视点采集的目标图像信息,并根据目标图像信息建立目标对象的识别轮廓曲线和识别方向;
9.s102:根据视点与目标对象的位置信息确定对应视点对目标对象的采集方向,并根据视点的视角范围、采集方向标定出识别轮廓曲线上对应的采集区域;
10.s103:根据采集方向和识别方向确定对应视点下的采集偏差角度,并根据偏差角度函数、采集偏差角度计算出采集区域中主识别范围,以及根据主识别范围将采集区域划分为主识别区域和次识别区域;
11.s104:根据主识别区域、次识别区域将对应视点所采集的目标图像信息对应分割成主识别图像、次识别图像;
12.s105:将当前视点所获得的次识别图像与其他视点所获得的存在交集区域的主识
别图像、次识别图像进行融合处理,得到融合图像;
13.s106:将融合图像以及未参与融合处理的主识别图像、次识别图像重组构成新的目标图像信息,并依据新的目标图像信息进行图像识别。
14.进一步的,多个所述视点间隔分布在同一视角平面内,识别轮廓曲线位于视角平面内。
15.进一步的,若多个所述视点为奇数,则识别轮廓曲线依据多个视点中位于中点的视点所采集的目标图像信息进行构建;若多个所述视点为偶数,则识别轮廓曲线依据多个视点中位于中点两侧的两个视点所采集的目标图像信息共同构建。
16.进一步的,所述识别方向的建立具体为:
17.标定识别轮廓曲线的中点,并对识别轮廓曲线的中点为做切线;
18.以中点为起始点作垂直于切线且背离视点的识别向量,以识别向量作为识别方向。
19.进一步的,所述采集方向为对应视点沿其视角范围的中分线指向识别轮廓曲线的方向。
20.进一步的,所述采集偏差角度为采集方向与识别方向的偏转角度。
21.进一步的,所述主识别范围的计算具体为:
22.将采集偏差角度输入偏差角度函数计算得到主识别范围的划分系数;
23.根据划分系数、视角范围计算得到主识别范围边线与采集方向的夹角偏值;
24.以夹角偏值在采集方向做对称偏差得到主识别范围。
25.进一步的,所述偏差角度函数具体为:
[0026][0027]
其中,θ0为主识别范围边线与采集方向的夹角偏值,θ1为视角范围,θ为采集偏差角度,θ k≤90
°
,α为主识别范围的取值范围。
[0028]
进一步的,所述融合图像融合处理具体为:
[0029]
将待融合处理的次识别图像、次识别图像进行重叠分析后得到交集区域;
[0030]
从待融合处理的次识别图像、次识别图像中截取交集区域进行单独融合得到融合区域;
[0031]
将融合区域与截取后的次识别图像、次识别图像进行拼接得到融合图像。
[0032]
第二方面,提供了基于物联网的多视角目标识别系统,包括:
[0033]
图像处理模块,获取多个视点采集的目标图像信息,并根据目标图像信息建立目标对象的识别轮廓曲线和识别方向;
[0034]
区域标定模块,用于根据视点与目标对象的位置信息确定对应视点对目标对象的采集方向,并根据视点的视角范围、采集方向标定出识别轮廓曲线上对应的采集区域;
[0035]
区域划分模块,用于根据采集方向和识别方向确定对应视点下的采集偏差角度,并根据偏差角度函数、采集偏差角度计算出采集区域中主识别范围,以及根据主识别范围将采集区域划分为主识别区域和次识别区域;
[0036]
图像分割模块,用于根据主识别区域、次识别区域将对应视点所采集的目标图像信息对应分割成主识别图像、次识别图像;
[0037]
图像融合模块,用于将当前视点所获得的次识别图像与其他视点所获得的存在交集区域的主识别图像、次识别图像进行融合处理,得到融合图像;
[0038]
重构识别模块,用于将融合图像以及未参与融合处理的主识别图像、次识别图像重组构成新的目标图像信息,并依据新的目标图像信息进行图像识别。
[0039]
与现有技术相比,本发明具有以下有益效果:
[0040]
1、本发明根据目标对象与监控视点的相对位置将目标图像分割成精度较高的主识别图像和次识别图像,并将次识别图像与其他视点下的图像进行补充融合,避免了不同视点下高精度的主识别图像与高精度的主识别图像之间的融合而降低了目标图像识别的准确度的情况发生;
[0041]
2、本发明通过偏差角度函数实现对主识别图像和次识别图像的智能划分,适用范围广,划分准确度较高;
[0042]
3、本发明通过主识别图像、次识别图像的划分融合以及交集区域区域融合处理,有效减少了计算量,提高了目标识别的效率,减少网络资源浪费。
附图说明
[0043]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0044]
图1是本发明实施例中的工作原理图;
[0045]
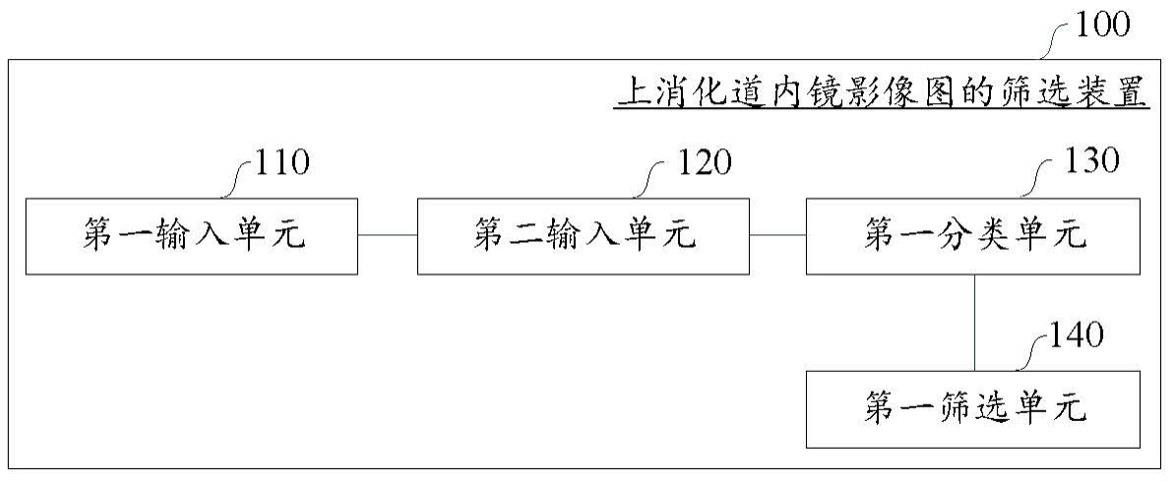
图2是本发明实施例中的系统架构图。
具体实施方式
[0046]
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图1
‑
2及实施例,对本发明进行进一步详细说明。
[0047]
实施例1
[0048]
基于物联网的多视角目标识别方法,如图1所示。
[0049]
s101:获取多个视点采集的目标图像信息,并根据目标图像信息建立目标对象的识别轮廓曲线和识别方向;多个所述视点间隔分布在同一视角平面内,识别轮廓曲线位于视角平面内。
[0050]
若多个所述视点为奇数,则识别轮廓曲线依据多个视点中位于中点的视点所采集的目标图像信息进行构建;若多个所述视点为偶数,则识别轮廓曲线依据多个视点中位于中点两侧的两个视点所采集的目标图像信息共同构建。
[0051]
识别方向的建立具体为:标定识别轮廓曲线的中点,并对识别轮廓曲线的中点为做切线;以中点为起始点作垂直于切线且背离视点的识别向量,以识别向量作为识别方向b。
[0052]
s102:根据视点与目标对象的位置信息确定对应视点对目标对象的采集方向,并
根据视点的视角范围、采集方向标定出识别轮廓曲线上对应的采集区域a。
[0053]
采集方向c为对应视点沿其视角范围的中分线指向识别轮廓曲线的方向。
[0054]
s103:根据采集方向和识别方向确定对应视点下的采集偏差角度,并根据偏差角度函数、采集偏差角度计算出采集区域中主识别范围,以及根据主识别范围将采集区域划分为主识别区域m和次识别区域n。
[0055]
采集偏差角度θ为采集方向与识别方向的偏转角度。
[0056]
主识别范围的计算具体为:将采集偏差角度输入偏差角度函数计算得到主识别范围的划分系数;根据划分系数、视角范围计算得到主识别范围边线与采集方向的夹角偏值;以夹角偏值在采集方向做对称偏差得到主识别范围。
[0057]
偏差角度函数具体为:
[0058][0059]
其中,θ0为主识别范围边线与采集方向的夹角偏值,θ1为视角范围,θ为采集偏差角度,θ k≤90
°
,α为主识别范围的取值范围。
[0060]
s104:根据主识别区域、次识别区域将对应视点所采集的目标图像信息对应分割成主识别图像、次识别图像。
[0061]
s105:将当前视点所获得的次识别图像与其他视点所获得的存在交集区域的主识别图像、次识别图像进行融合处理,得到融合图像。
[0062]
s106:将融合图像以及未参与融合处理的主识别图像、次识别图像重组构成新的目标图像信息,并依据新的目标图像信息进行图像识别。
[0063]
融合图像融合处理具体为:将待融合处理的次识别图像、次识别图像进行重叠分析后得到交集区域;从待融合处理的次识别图像、次识别图像中截取交集区域进行单独融合得到融合区域;将融合区域与截取后的次识别图像、次识别图像进行拼接得到融合图像。
[0064]
实施例2
[0065]
基于物联网的多视角目标识别系统,如图2所示,包括图像处理模块、区域标定模块、区域划分模块、图像分割模块、图像融合模块、重构识别模块。
[0066]
图像处理模块,获取多个视点采集的目标图像信息,并根据目标图像信息建立目标对象的识别轮廓曲线和识别方向。区域标定模块,用于根据视点与目标对象的位置信息确定对应视点对目标对象的采集方向,并根据视点的视角范围、采集方向标定出识别轮廓曲线上对应的采集区域。区域划分模块,用于根据采集方向和识别方向确定对应视点下的采集偏差角度,并根据偏差角度函数、采集偏差角度计算出采集区域中主识别范围,以及根据主识别范围将采集区域划分为主识别区域和次识别区域。图像分割模块,用于根据主识别区域、次识别区域将对应视点所采集的目标图像信息对应分割成主识别图像、次识别图像。图像融合模块,用于将当前视点所获得的次识别图像与其他视点所获得的存在交集区域的主识别图像、次识别图像进行融合处理,得到融合图像。重构识别模块,用于将融合图像以及未参与融合处理的主识别图像、次识别图像重组构成新的目标图像信息,并依据新的目标图像信息进行图像识别。
[0067]
工作原理:根据目标对象与监控视点的相对位置将目标图像分割成精度较高的主识别图像和次识别图像,并将次识别图像与其他视点下的图像进行补充融合,避免了不同视点下高精度的主识别图像与高精度的主识别图像之间的融合而降低了目标图像识别的准确度的情况发生;通过偏差角度函数实现对主识别图像和次识别图像的智能划分,适用范围广,划分准确度较高;通过主识别图像、次识别图像的划分融合以及交集区域区域融合处理,有效减少了计算量,提高了目标识别的效率,减少网络资源浪费。
[0068]
本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。