1.本发明涉及一种具有操作部件的输入设备,所述操作部件相对于载体可动地,优选地可振动地支承,以便例如能够借助致动器而处于产生主动的触觉反馈的运动,例如振动以及/或者通过遵循操纵地移动所述操纵部件来进行输入,例如触发开关状态变化或实施控制功能。
背景技术:
2.在触摸时,操作者可以感觉到这个运动或振动,因此,在手动输入期间以及之后,这个运动或振动针对操作者产生触觉上可以察觉到的响应,也称为反馈。通常力求实现操作部件的最小运动,从未受操纵的操作部件的休止位置至受操纵的操作部件的最大偏转位置的行程例如小于1mm,部分仅为十分之几毫米。特别是在具有最小偏转的情况下,但是一般而言,这对操作部件的支承造成困难,因为在载体与操作部件之间的每次滑动接触都会导致非期望的滞后,例如由从静摩擦到滑动摩擦的过渡而引起的滞后。这个滞后导致在进行操纵时操作部件的行为被感知为是不精确的。因此,需要对提供主动反馈和/或操纵所必需的运动自由度的操作部件进行支承,但其中同时可以尽可能省略处于滑动接触的组件。在操作部件由于例如容置在面板中而应尽可能无倾斜地被支承时,这特别是具有挑战性。因此,本发明致力于所述操作部件的尽可能无滑动接触的“浮动”和复位支承。
技术实现要素:
3.有鉴于此,本发明的目的是提供一种输入设备,所述输入设备在其操作部件的支承方面有所改进,从而可以避免特别是因操纵期间的滑动接触而引发的滞后。要指出的是,在权利要求中单独列出的特征可以以任何技术上合理的方式彼此组合并且阐明了本发明的其他技术方案。特别是结合附图所作的描述补充性地表征和说明了本发明。
4.本发明涉及一种输入设备。根据本发明的输入设备具有操作部件。所述操作部件具有接触面或触摸面。为简单起见,下面将其称为触摸面,因为触摸这个面是操纵这个操作部件的最低要求。这个操作部件例如但并非必须配设有触敏触摸面,因为设有用于检测触摸这个触摸面的构件,特别是用于空间分辨地检测这个触摸的构件。这个触摸面的面积优选大于10cm2,更优选大于25cm2。所述操作部件可以是触摸板或触摸屏。在本发明中,术语“触摸板”应作广义解释并且涉及每个触敏操作部件,就所述触敏操作部件而言,空间分辨地检测触摸面的触摸。优选设有触摸板,以便例如根据触摸曲线进行输入,例如控制显示器上的光标。此外,所述触摸板可以是显示器和触敏触摸面(“触摸屏”)的组合的一部分或者可以定义无显示器的,即纯触的敏触摸面。例如以电容、电阻或光学的方式测定触摸坐标或其曲线。
5.此外,根据本发明的输入设备还具有载体,所述操作部件可动地支承在所述载体上。所述载体例如用于将所述输入设备固定在诸如仪表盘之类的车辆结构上。此外,根据本发明的输入设备还包括用于将所述操作部件可动地支承在所述载体上的构件,其在下文中
也简称为构件,以便以可沿偏转方向从休止位置进行偏转并复位至这个休止位置的方式对所述操作部件进行支承。这个可动的支承适于实现这个操作部件的可检测的操纵,即在操纵力作用于这个触摸面时移动这个操作部件,或者能够产生主动的触觉反馈,或者使得二者均能得到实现。在偏转方向上的最大可能位移的程度,也称为行程,优选仅为1mm或更小。
6.所述偏转方向优选基本上正交于所述触摸面。
7.此外,优选设有用于产生主动的触觉反馈的致动器,所述致动器适于在其被施加电控制信号时,在偏转方向上产生所述操作部件的运动激励,从而针对所述操作者产生主动的触觉反馈(=响应)。这个致动器优选为电磁或压电致动器。更优选设有电磁致动器,这个电磁致动器包括电枢和与这个电枢电磁地相互作用的电线圈并且例如根据插入式电枢原理、扁平电枢原理或音圈原理而构造。在此情况下,这个操作部件的合力运动不一定是振动的,即与一个或多个穿过原始的休止位置的通路相关联的运动,而是也可以是仅包含一次偏转和阻尼地返回至这个休止位置的运动。
8.此外,为能实现可检测的操纵,根据一个技术方案,设有用于操纵检测的构件,例如在一个简单的技术方案中,设有一个开关元件,所述开关元件的开关位置通过操作部件在偏转位置中的机械作用而切换。在另一技术方案中,设有布置在操作部件与载体之间的力传感器,所述力传感器适于检测在操纵期间作用于所述操作部件的触摸面的操纵力,以便在超过预定的操纵力时触发开关状态的改变等。这个力传感器例如是借助压电、电容或电感测量原理进行检测的力传感器。为了检测作用于触摸面的操纵力,即操作部件与载体之间的相对运动,优选设有电容式力传感器。例如在超过预定的操纵力时,触发通过致动器而产生的触觉反馈。这个力传感器例如适于结合测量电容的变化基于由操作者施加到这个触摸面上的操纵力来检测操作部件在偏转方向上的位移。这个测量电容例如特别是通过作为产生这个测量电容的电极的这些板簧元件中的一个以及通过固定在载体上的另一对配电极而引起的,因为这些电极被施加了相应的电势。
9.根据本发明,所述用于可动地支承所述操作部件的构件包括至少三个板簧元件。所述板簧元件优选由弹簧钢构成,更优选构建为由弹簧钢板制成的冲压件。所有板簧元件优选以均匀的方式设计。根据本发明,所述板簧元件分别具有至少一个在所述载体与所述操作部件之间延伸的弹性屈服的弹簧区段。所述弹簧区段的特征在于在偏转方向上具有特别大的弯曲弹性。所述弹簧区段的特征优选在于,所述弹簧钢在所述弹簧区段的区域中是敞开的。这个板簧元件的末端通过动力耦合连接一方面固定在载体上,另一方面固定在操作部件上。根据本发明,每个板簧元件的弹簧区段的总长度基本相同。如果每个板簧元件具有多个弹簧区段,则这些弹簧区段的长度加起来的总长度对于所有板簧元件而言基本上是相同的。根据本发明,所述板簧区段彼此平行地错开布置。这些板簧区段例如以某种方式布置,使得一个板簧区段的布置通过相应的另一板簧区段在平行于偏转方向的方向上和/或在垂直于偏转方向的方向上的平行位移而产生。根据本发明,至少两个板簧元件通过分别以形状配合的方式容置相关的板簧元件的连接桥而连接,以便将相关弹簧区段例如围绕在载体与操作部件之间,即在这个板簧区段的纵向方向上延伸的假想轴线(纵轴)的扭转减至最小,从而最终实现这个操作部件围绕垂直于偏转方向的假想轴线的倾斜的最小化,乃至抑制这个倾斜。这样就可以省去任何其他的滑动接触,例如面临开篇所描述的摩擦问题的输入部件与载体之间的导引卡合。从而防止操纵和/或主动的触觉反馈面临滞后问题。否则
就例如无法可靠地在操纵之后或在产生主动的触觉反馈之后到达休止位置,因此,根据本发明的解决方案确保在产生反馈之后实现有所改善的复位并且基于在光学和触觉方面的改进而实现积极的操作者体验。
10.优选通过借助热塑性塑料对所述板簧元件进行包覆成型来构建所述连接桥。这个板簧元件例如在其走向中在载体与操作部件之间被连接桥的热塑性塑料包围,以便如此在这个板簧元件上形成两个弹簧区段,即位于载体与连接桥之间的第一弹簧段以及位于连接桥与操作部件之间的第二弹簧区段。
11.优选至少设有第一对板簧元件,所述板簧元件的弹簧区段在所述操纵部件的休止位置上处于同一平面中,其中所述平面被正交于偏转方向的线跨越并且所述相关的弹簧区段通过所述连接桥而连接。这个平面例如倾斜于偏转方向。所述偏转方向优选垂直于所述平面。
12.此外,优选还设有第二对板簧元件,即例如总共设有四个板簧元件,其中所述第二对板簧元件具有处于第二平面中的弹簧区段,所述第二平面以沿偏转方向与所述第一平面平行错开的方式布置并且所述弹簧区段通过另一连接桥而连接。
13.为了补充性地进行加强,这些连接桥抗扭地相互连接或者一体成型,例如通过在同一包覆成型过程中对第一和第二平面的所有板簧元件进行包覆成型。
14.根据一个优选的技术方案,至少一个板簧元件形成自由端,所述自由端支撑在所述载体上,以便补充性地促使所述操作部件复位至所述休止位置。
15.优选地,至少一个固定部件通过借助热塑性塑料包覆成型而固定在所述板簧元件上。这例如可以通过在成型的注塑过程中对整个板簧元件进行包覆成型而实现,其中既形成所述连接桥,又形成所述固定部件。每个板簧元件例如分别设有一个优选固定在这个板簧元件的末端上的用于固定在所述载体上的载体侧固定不仅以及一个优选同样固定在末端上的用于固定在所述操作部件上的操作部件侧固定部件。优选设有至少一个固定部件,所述固定部件通过榫槽连接抗扭地固定在所述载体或所述操作部件上。这个榫槽连接优选以某种方式构建,从而实现这个连接的零间隙,具体方式在于,这个连接的至少一个配合件采用楔形设计方案并且在建立连接时或者随着配合件的卡合的增加而实现磨合。
16.优选地,除了出于功能上必要的原因而绝对必不可少的与载体的连接(例如通过板簧元件的弹性屈服的制成、通过力传感器的弹性支撑以及通过致动器的连接)之外,所述操作部件不具有其他任何与载体的连接(例如导引件或铰接连接),因此,所述操作部件自由浮动地固定在所述载体上。
17.此外,本发明还涉及上述有利技术方案中的输入设备在汽车中的有利用途。
附图说明
18.下面结合附图对本发明以及技术环境进行详细说明。要指出的是,附图示出了本发明的特别优选的实施变体,但并不局限于此。其中示意性示出:
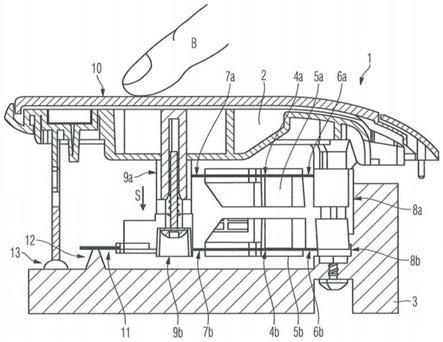
19.图1为根据本发明的输入设备1的一个实施方式的示意性剖视图;
20.图2为用于可动地支承操作部件2,特别是图1所示相关的板簧元件4a、4b的构件的透视图。
具体实施方式
21.图1示出根据本发明的输入设备1的一个实施方式。这个输入设备具有定义触摸面10的操作部件2。触摸面10面向操作者b,使得其可以通过手动操纵,即按下操作部件2以及操纵所引起的操作部件2的位移借助输入设备1进行输入。这使得操作部件2能够从图1所示休止位置沿偏转方向s进行偏转并以弹性复位的方式支承在载体3上,这个载体用于将输入设备1固定在未示出的内衬或汽车的仪表盘上。通过四个均匀设计的板簧元件4a、4b实现可动支承,其中在图1所示剖视图中仅两个板簧元件可见。操作部件2通过板簧元件4a、4b支撑在载体3上。板簧元件4a、4b分别由冲压的弹簧钢板构成。偏转方向s基本上正交于触摸面10所定义的平面。支撑性支承指的是,在按预期方式操作输入设备1时,板簧元件4a、4b完全不或仅略微受到拉力。通过板簧元件4a、4b沿偏转方向s以弹性复位的方式进行支承,以便一方面能够实现可检测的操纵,另一方面也通过图2所示电磁致动器16产生运动激励,用以对操作者b进行触觉反馈。为了检测这个操纵,设有力传感器13,这个力传感器布置在载体3与操作部件2之间并且用于位置检测。为了实现限位止挡,设有弹性止挡元件15。
22.板簧元件4a、4b构建为平面板件并且布置在两个平面中。在更靠近操作者b的上部平面中,设有两个上部板簧元件4a,其分别具有两个总长度相同的弹簧区段6a和7a。这两个上部弹簧元件的弹簧区段6a和7a在正交于偏转方向s的方向上彼此平行错开地延伸。在两个上部弹簧区段6a与7a之间构建有上部连接桥5a,这个上部连接桥通过借助热塑性塑料包覆成型而以形状配合的方式容置上部板簧元件4a并且减扭地交替对这些上部板簧元件进行加强。在上部板簧元件4a的末端上设有载体侧上部固定部件8a和操作部件侧上部固定部件9a,这些固定部件通过借助热塑性塑料对上部板簧元件4a进行包覆成型而固定在这些上部板簧元件上。载体侧上部固定部件8a用于将上部板簧元件4a固定在载体3上,而操作部件侧上部固定部件9a则用于将这些上部板簧元件固定在操作部件2上。载体侧上部固定部件8a具有楔形榫舌14a,其卡入未示出的载体侧凹槽中,以便在载体3上实现无间隙的固定。
23.在背离操作者b且沿偏转方向s平行于上部平面地错开的下部平面中,设有两个下部板簧元件4b,其同样分别具有两个总长度相同的弹簧区段6b和7b。这两个下部板簧元件的弹簧区段6b和7b在正交于偏转方向s的方向上彼此平行错开地延伸。在两个下部弹簧区段6b与7b之间构建有下部连接桥5b,这个下部连接桥通过借助热塑性塑料包覆成型而以形状配合的方式容置下部板簧元件4b并且减扭地交替对这些下部板簧元件进行加强。在下部板簧元件4b的末端上设有载体侧下部固定部件8b和操作部件侧下部固定部件9b,这些固定部件通过借助热塑性塑料对下部板簧元件4b进行包覆成型而固定在这些下部板簧元件上。载体侧下部固定部件8b用于将下部板簧元件4b固定在载体3上,而操作部件侧下部固定部件9b则用于将这些下部板簧元件固定在操作部件2上。载体侧下部固定部件8b具有楔形榫舌14b,其卡入未示出的载体侧凹槽中,以便在载体3上实现无间隙的固定。当所有其他固定部件(8a、8b、9a)都构建在板簧元件4a、4b的末端上时,下部板簧元件4b穿过操作部件侧下部固定部件9b并借助支撑在构建在载体3上的凸起12上的自承末端11突出于这些下部固定部件,以便如此借助自由端11对由弹簧区段6a、6b、7a、7b而引起的复位进行支持。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。