1.本发明涉及实验力学、非接触式全场应变测量、数字图像相关方法,具体涉及一种数字图像相关中的应变光滑方法。
背景技术:
2.在航空航天、建筑桥梁等诸多领域中,保证结构可靠性永远是第一要务。随着科学技术的发展,能够在结构发生不可逆损伤之前,对其施以控制修缮,成为诸多科学家的重要目标。而由实验力学提供的材料响应载荷表征的测量结果,对于完善设计,改进结构以及监测损伤都具有丰富的指导意义。位移与应变,作为实验力学重要参量,对于分析模型力学特性、验证基础假设及特征识别等都具有举足轻重的作用。面对日益复杂的测量需求,传统的位移应变测量方法就显得捉襟见肘。与此同时,有限处位移应变测量结果远不能胜任复杂模型的分析工作。并且针对各种测量条件的约束,能够实现全场应变及非接触式测量的新兴测量技术应运而生。
3.能够进行全场测量的不同方法,各有其准确性及适用性优势。而又能够同时满足非接触测量条件的数字图像相关法(digital image correlation,dic),由于其较低的实验成本及数据采集过程相对简单等优势已被广泛用于实验力学中,其对测量环境和隔振要求较低,普适性强,广泛应用于各种工程和学科领域,如航空航天、生物医疗等。
4.数字图像相关法(dic)中,如何准确测量应变一直是相关学者关心为问题。理论上,应变是位移的导数。但在实际dic测量过程中,由于噪声及像素插值存在误差等诸多原因,导致位移测量结果存在一定误差。而由该位移测量结果进行微分计算应变时,位移场中的误差会被进一步放大,导致不精确的应变测量结果。相关研究人员曾提出多种位移场平滑方法以提高应变计算精度,但大多数学形式复杂或计算量大幅提高,以致限制实际应用。
技术实现要素:
5.本发明针对现有技术中存在的问题,公开了一种数字图像相关中的应变光滑方法,本发明的方法针对单元内的位移场进行拟合,求得单元内的平均位移。再由与节点相邻所有单元的平均应变,可以计算得到该节点的光滑应变。通过两种方法加成,显著提高应变计算精度。
6.本发明是这样实现的:
7.一种数字图像相关中的应变光滑方法,其特征在于,所述的方法具体为:
8.步骤一、搭建数字图像相关测量系统,获取试件变形前的参考图像及变形后的变形图像;
9.步骤二、依据有限元网格单元及单元节点,对图像进行网格划分;
10.步骤三、依据数字图像相关方法,对于每个网格单元,计算单元内多个特征点的位移;
11.步骤四、选定每个单元内的位移函数类型,使用拟合法,根据单元特征点的位移,
对该单元的位移函数进行拟合;
12.步骤五、根据拟合的单元位移函数,计算该单元内的平均应变;
13.步骤六、根据与节点相邻网格单元的平均应变,计算该节点的光滑应变;
14.步骤七、依据计算得到的各节点的光滑应变,插值得到全场应变。
15.进一步,所述的步骤二中,网格划分方法为均匀网格划分方法或者非均匀网格划分方法;划分网格单元为三角网格、矩形网格或多边形网格。
16.进一步,所述的单元内多个特征点均为特定选择的点,具体包括:单元节点、单元边上的点或单元内部的点。
17.进一步,所述的步骤四中,根据单元位移函数类型及特征点的个数,对单元内位移函数进行拟合,所有拟合法均适用于本方法。
18.进一步,所述的步骤六中,光滑应变的计算方法为:
[0019][0020]
式中,代表节点光滑应变,为传统有限元中的应变,为光滑子域,由与节点相邻的所有网格单元组成,φ(x)为光滑函数,可做如下定义
[0021][0022]
式中,为光滑子域面积;
[0023]
由于已经计算得到节点相邻单元内平均应变,公式(1)改写为如下形式
[0024][0025]
式中,为光滑子域面积,n为与节点相邻的网格单元总数,ε
i
代表第i个单元的平均应变,ω
i
代表第i个单元的面积。
[0026]
本发明与现有技术的有益效果在于:
[0027]
本发明的方法不局限于何种网格划分方式,在各网格单元内选取特征点进行位移场拟合。选取特征点越多,位移场拟合效果越好,应变计算精度越高。
[0028]
本发明可以自行在计算效率及计算精度间权衡取舍。当位移场函数拟合完成后,计算得到单元内平均应变。由与节点相邻所有单元的平均应变,可以计算得到该节点的光滑应变,对于应变计算精度进行进一步地提升。
附图说明
[0029]
图1为本发明一种数字图像相关中的应变光滑方法的实施例中参考图像与变形图像;
[0030]
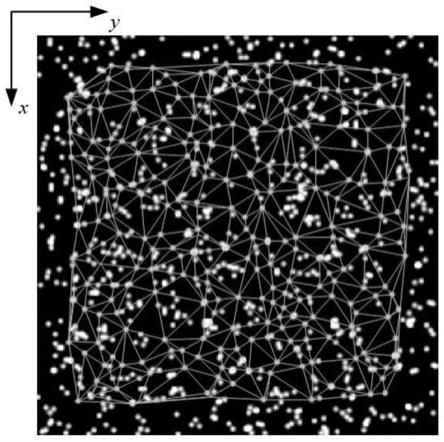
图2为本发明一种数字图像相关中的应变光滑方法的实施例中网格划分结果;
[0031]
图3为本发明一种数字图像相关中的应变光滑方法的实施例中拟合应变测量结果图;
[0032]
图4为本发明一种数字图像相关中的应变光滑方法的实施例中光滑应变测量结果
图。
具体实施方式
[0033]
为使本发明的目的、技术方案及效果更加清楚,明确,以下列举实例对本发明进一步详细说明。应当指出此处所描述的具体实施仅用以解释本发明,并不用于限定本发明。
[0034]
为实现本发明的目的,本发明的方法具体步骤为:
[0035]
步骤一:搭建数字图像相关测量系统,获取试件变形前的参考图像及变形后的变形图像;
[0036]
步骤二:将参考图像进行网格单元划分,记录每个单元及节点编号;
[0037]
步骤三:将单元节点、单元边中点和单元中心作为单元特征点,使用像素插值得到特征点的位置坐标,使用数字图像相关方法计算所有单元特征点的位移;
[0038]
步骤四:选定单元内的位移拟合函数,例如一次多项式,形式如下
[0039][0040]
式中,u,v为位移,x,y为位置坐标,a0,a1,a2,b0,b1,b2为待定系数。
[0041]
根据单元特征点的位置坐标及位移,使用最小二乘法即可拟合得到公式(4);
[0042]
步骤五:根据拟合得到的位移函数,计算每个单元内的平均应变;
[0043]
步骤六:根据与节点相邻网格单元的平均应变,计算该节点的光滑应变,光滑应变的计算方法为:
[0044][0045]
式中,代表节点光滑应变,为传统有限元中的应变,为光滑子域,由与节点相邻的所有网格单元组成,φ(x)为光滑函数,可做如下定义
[0046][0047]
式中,为光滑子域面积。
[0048]
由于已经计算得到节点相邻单元内平均应变,公式(1)可改写为如下形式
[0049][0050]
式中,n为与节点相邻的网格单元总数,ε
i
代表第i个单元的平均应变,ω
i
代表第i个单元的面积。
[0051]
步骤七、依据计算得到的各节点的光滑应变,插值得到全场应变。
[0052]
以下列举具体的实例进行叙述本发明的方法:
[0053]
模拟散斑图像由计算机高斯散斑算法生成,像素为300
×
300,散斑数目为1000,生成参考图像,然后设定x向正应变为0.002,y向正应变为0.003,生成变形图像,如图1所示。通过上述算法计算位移场,然后将计算结果与真实解进行对比。
[0054]
具体实施步骤如下:
[0055]
步骤一:对计算机产生的模拟散斑参考图像进行三角网格划分,网格划分结果及坐标系方向如图2所示;
[0056]
步骤二:选取三角网格节点,三边中点及三角形中心作为单元特征点,记录该7个特征点的位置坐标,使用数字图像相关方法计算该7个特征点的位移;
[0057]
步骤三:选择一次多项式作为单元内的位移函数,如公式(4)表示,由7个特征点的位置坐标及位移,采用最小二乘法,拟合出单元位移场;
[0058]
步骤四:由于单元位移场为一次函数,故单元内应变为常应变,对位移场函数微分即可得单元内平均应变,如下式所示
[0059][0060]
根据所有单元测得的常应变,插值出全场应变,结果如图3所示。
[0061]
结果显示,x向正应变测量均值为1998.6
×
10
‑6,标准差为5.05
×
10
‑5,最大值为2296.5
×
10
‑6,最小值为1678.3
×
10
‑6,最大误差为14.8%,最小误差为
‑
16.1%;
[0062]
y向正应变测量均值为2998.9
×
10
‑6,标准差为5.39
×
10
‑5,最大值为3450.4
×
10
‑6,最小值为2832.2
×
10
‑6,最大误差为15%,最小误差为
‑
5.6%;
[0063]
步骤五:针对每一个节点,根据与其相邻的单元的平均应变,根据公式(3)计算出该点的光滑应变;
[0064]
步骤六:根据全部节点的光滑应变,插值出全场光滑应变,结果如图4所示。
[0065]
结果显示,x向正应变测量均值为1998.0
×
10
‑6,标准差为1.28
×
10
‑5,最大值为2044.6
×
10
‑6,最小值为1910.2
×
10
‑6,最大误差为2.2%,最小误差为
‑
4.5%;
[0066]
y向正应变测量均值为2996.0
×
10
‑6,标准差为1.70
×
10
‑5,最大值为3054.3
×
10
‑6,最小值为2932.2
×
10
‑6,最大误差为1.8%,最小误差为
‑
2.3%;
[0067]
将光滑应变与拟合应变结果进行对比发现,光滑应变方法可以有效减小数据测量误差,提高测量精度。
[0068]
最后应当说明的是,以上实施方案仅用以说明本发明的实现方式而非对其限制;人们应该理解,对该发明的实施过程进行修改或者部分算法过程进行同等替换,而不会脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。