用于致动张力带的带有长度守恒机构的医疗工具
1.相关申请
2.本专利申请要求美国临时专利申请第62/860,938号(于2019年6月13日提交)(名称为“medical tool with length conservation mechanism for actuating tension bands(用于致动张力带的带有长度守恒机构的医疗工具)”)的优先权和申请日权益,该专利申请通过引用整体并入本文。
技术领域
3.本文描述的实施例涉及抓取工具,更具体地涉及医疗设备,并且更加具体地涉及内窥镜工具。更特别地,本文描述的实施例涉及包括张力带和用于在腕接头的运动范围期间使带的长度守恒的机构的设备。
背景技术:
4.用于微创外科手术(mis)的已知技术采用器械来操纵组织,这些器械可以手动控制,也可以经由计算机辅助远程操作进行控制。许多已知的mis器械包括安装在轴的远端处的腕机构上的治疗或诊断末端执行器(例如,钳子、切割工具或烧灼工具)。在mis手术期间,末端执行器、腕机构和轴的远端可以插入患者的小切口或自然孔口中,以将末端执行器定位在患者体内的工作部位处。可选的腕机构能够用于改变末端执行器相对于轴的取向,以在工作现场处进行期望的手术。已知的腕机构通常为末端执行器的运动提供期望的自由度(dof)。例如,对于钳子或其他抓取工具,已知的腕机构通常能够改变末端执行器相对于轴的俯仰和偏转。腕部可以可选地为末端执行器提供滚动dof,或者可以通过滚动轴来实现滚动dof。末端执行器可以可选地具有额外机械dof,例如夹持运动或刀片运动。在一些情况下,腕部和末端执行器机械dof可以相结合。例如,美国专利第5,792,135号(于1997年5月16日提交)公开了一种机构,其中腕部和末端执行器夹持dof相结合。
5.为了实现腕机构和末端执行器的期望移动,已知的器械包括延伸穿过器械的轴并将腕机构连接到致动器(在本文中也称为后端机构)的张力元件(例如,缆线)。该致动器使缆线移动以操作腕机构。对于机器人系统或远程操作系统,后端机构是由马达驱动的,并且能够可操作地联接到处理系统,以为临床用户(例如,外科医生)提供用户接口来控制器械。
6.患者受益于为提高mis方法和工具的有效性而做的不断努力。例如,减小轴和腕机构的尺寸和/或操作收起空间可以允许更小的进入切口并减少对外科手术部位空间的需求,从而减少外科手术的负面影响,例如疼痛、疤痕和不希望的愈合时间。但是,为微创手术生产实现临床期望功能的小型医疗器械可能具有挑战性。具体来说,简单地通过“按比例缩小”部件来减小已知腕机构的尺寸不会产生有效的解决方案,因为所需的部件和材料特性不会按比例缩小。例如,腕机构的有效率的实施可能会很复杂,因为必须小心地将缆线行进穿过腕机构,以在腕机构的整个运动范围内保持缆线张力,并最大限度地减少一个旋转轴线与另一个旋转轴线的相互作用(或联接效应)。此外,通常需要滑轮和/或波状表面来减少缆线摩擦,这延长了器械寿命并允许操作而不会向缆线或腕机构中的其他结构施加过大的
力。可能由较小的结构(包括缆线和腕机构的其他部件)造成的增加的局部力会导致缆线在储存和使用期间出现不希望的加长(例如,“拉伸”或“蠕变”)、缆线寿命缩短等等。
7.此外,腕机构通常为末端执行器的运动提供特定的自由度。例如,对于钳子或其他抓取工具,腕部可能能够改变末端执行器的俯仰、偏转和夹持。更多的自由度可以通过腕部实现,但将需要腕部和轴中的额外致动构件,这会争夺考虑到mis应用所需的尺寸限制而存在的有限空间。其他自由度(例如,滚动或通过移动主管而进行的插入/拔出)也争夺设备的轴处或轴中的空间。
8.机器人控制的医疗器械中用于腕机构的常规架构使用缆线来转动腕机构中的绞盘,并从而旋转腕机构的连接到绞盘的部分。例如,腕机构可以包括三个绞盘,用于绕俯仰轴线、偏航轴线或夹持轴线旋转。每个绞盘都可以使用附接到绞盘的两根缆线进行控制,这样一侧拉出缆线,而另一侧则拉入等长的缆线。在这种架构的情况下,三个自由度需要总共六根缆线,这六根缆线从腕机构沿主管的长度向后延伸到器械的后端机构。腕机构的有效率的实施可能很复杂,因为必须小心地将缆线穿过腕机构,以在腕机构的整个运动范围内保持腕部的稳定性,并最大限度地减少一个旋转轴与另一个旋转轴的相互作用(或联接效应)。此外,通常需要滑轮来减少缆线摩擦,这延长了器械寿命并允许操作而不会向缆线或腕机构中的其他结构施加过大的力。
9.因此,需要改进的内窥镜工具,包括改进的后端机构以使腕部能够用少量的张力元件进行操作,以促进器械的小型化并降低器械的成本,并通过减少所需部分的数量来降低制造成本。
技术实现要素:
10.本发明内容介绍了本文描述的实施例的某些方面以提供基本的理解。本发明内容不是对本发明主题的广泛概述,并且不旨在鉴定重点或关键要素或描绘本发明主题的范围。在一些实施例中,医疗设备包括医疗器械的轴、末端执行器、外壳、第一致动器、第二致动器、第一带和第二带。医疗器械的轴包括近端和远端,并且末端执行器联接到轴的远端。外壳联接到轴的近端。第一致动器和第二致动器被可旋转地支撑在外壳中。第一带具有第一端部和第二端部,第一带的第一端部联接到第一致动器,并且第一带的第二端部联接到末端执行器。第二带具有第一端部和第二端部,第一端部联接到第一致动器,并且第二端部联接到末端执行器。第一致动器被配置为沿第一方向移动第一带并且沿与第一方向相反的第二方向移动第二带,从而以第一自由度致动末端执行器。第二致动器包括第一引导结构,第一引导结构具有第一引导表面和第二引导表面。第一引导表面与第一带的第一端部接触,第二引导表面与第二带的第一端部接触,并且第二致动器的运动沿第一方向致动第一带和第二带二者,从而以第二自由度致动末端执行器。
11.在一些实施例中,医疗器械还包括第三致动器、第四致动器、第三带、第四带,并且末端执行器包括第一钳爪构件和第二钳爪构件。第一带和第二带的第二端部联接到第一钳爪构件。第三带和第四带的第一端部联接到第三致动器,并且第三带和第四带的第二端部联接到第二钳爪构件。第三致动器的运动沿第一方向致动第三带并且沿第二方向致动第四带,从而致动末端执行器的第二钳爪。第四致动器包括第二引导结构,第二引导结构具有第三引导表面和第四引导表面。第三引导表面与第三带的第一端部接触,并且第四引导表面
与第四带的第一端部接触。第四致动器的运动沿第二方向致动第三带和第四带二者,从而以第二自由度致动末端执行器。
12.在一些实施例中,第一引导表面和第二引导表面各自具有与第二致动器整体构造在一起的弯曲表面。第一引导表面和第二引导表面绕第二致动器的第一引导结构轴线弯曲。第一引导表面具有沿着第一引导结构轴线延伸的第一宽度,并且第二引导表面具有沿着第一引导结构轴线延伸的第二宽度,第二宽度沿着第一引导结构轴线与第一引导表面间隔开。当第一致动器移动第一带和第二带时,第一带的第一端部沿着第一引导表面滑动并且第二带的第一端部沿着第二引导表面滑动。第三引导表面和第四引导表面绕第二致动器的第二引导结构轴线弯曲。第三引导表面具有沿着第二引导结构轴线延伸的第三宽度,并且第四引导表面具有沿着第二引导结构轴线延伸的第四宽度,第四宽度沿着第二引导结构轴线与第四引导表面间隔开。当第三致动器移动第三带和第四带时,第三带的第一端部沿着第三引导表面滑动并且第四带的第一端部沿着第四引导表面滑动。
13.在一些实施例中,第二致动器包括桥接部。桥接部从在第一引导表面和第二引导表面之间的第一位置延伸到在第三引导表面和第四引导表面之间的第二位置。在一些实施例中,第二致动器包括具有旋转轴线的底座部分。第一引导表面为第二致动器的平行于旋转轴线的第一宽度,第二引导表面为第二致动器的平行于旋转轴线的第二宽度,第三引导表面为第二致动器的平行于旋转轴线的第三宽度,并且第四引导表面为第二致动器的平行于旋转轴线的第四宽度。以此方式,第一宽度、第二宽度、第三宽度和第四宽度各自相对于旋转轴线彼此间隔开。在一些实施例中,医疗设备包括可旋转地支撑在外壳中的驱动齿轮,并且第二致动器包括可操作以将运动从驱动齿轮传递到第二致动器的扇形齿轮。
14.在一些实施例中,医疗器械的轴限定了沿着轴的中心轴线从轴的近端延伸到远端的内腔。医疗设备包括联接到外壳的引导构件,并且引导构件包括第一引导槽和第二引导槽。引导构件的至少一部分在轴的近端处在内腔之上延伸。第一带的中央部分在第一引导槽内行进并进入内腔,并且第二带的中央部分在第二引导槽内行进并进入内腔。第一引导槽位于距轴的中心轴线第一距离处,而第二引导槽位于距中心轴线第二距离处。第一距离不同于第二距离。在一些实施例中,第一致动器包括钩部,并且第一带的第一端部经由钩部联接到第一致动器。在一些实施例中,第一致动器和第三致动器二者的同时移动以第三运动度致动末端执行器。在该同时移动期间,第一致动器沿第一方向移动第一带并沿第二方向移动第二带。第三致动器沿第一方向移动第三带并沿第二方向移动第二带。
15.在一些实施例中,医疗器械包括医疗器械的轴、末端执行器、外壳、第一致动器、第二致动器、第一带、第二带和引导构件。医疗器械的轴包括近端和远端,并且轴限定了沿着轴的中心轴线从近端延伸到远端的内腔。末端执行器联接到轴的远端,而外壳联接到轴的近端。第一致动器和第二致动器被可旋转地支撑在外壳中。第一带具有第一端部和第二端部,第一带的第一端部联接到第一致动器,而第二端部联接到末端执行器。第二带具有第一端部和第二端部。第二带的第一端部联接到第一致动器并且第二带的第二端部联接到末端执行器。引导构件联接到外壳,并且引导构件的至少一部分在轴的近端处在内腔之上延伸。引导构件包括第一引导元件和第二引导元件。第一带的中央部分在第一引导元件之上行进并进入内腔,并且第二带的中央部分在第二引导元件之上行进并进入内腔。第一引导元件在沿着中心轴线距轴的近端第一偏移距离处,第二引导元件在沿着中心轴线距轴的近端第
二偏移距离处,并且第一偏移距离不同于轴向第二距离。第一致动器被配置为沿第一方向移动第一带并且沿与第一方向相反的第二方向移动第二带,从而以第一自由度致动末端执行器。第二致动器被配置为沿第一方向移动第一带和第二带,从而以第二自由度致动末端执行器。
16.在一些实施例中,第一引导元件包括第一杆和当第一带移动时可绕第一杆旋转的第一轴承。第二引导元件包括第二杆和当第二带移动时可绕第二杆旋转的第二轴承。当第一致动器沿第一方向移动第一带并沿第二方向移动第二带时,第一轴承和第二轴承可操作以沿相反方向旋转。当第二致动器沿第一方向移动第一带和第二带时,第一轴承和第二轴承可操作以沿相同方向旋转。在一些实施例中,第一带和第二带的中央部分离开引导构件并以大约90度进入轴的内腔。在一些实施例中,第一引导元件从中心轴线垂直偏移第一偏移距离。第二引导元件从中心轴线垂直偏移第二偏移距离,其中第一距离不同于第二距离。
17.在一些实施例中,医疗器械还包括第三致动器、第三带、第四带,并且末端执行器包括第一钳爪构件和第二钳爪构件。第一带和第二带的第二端部联接到第一钳爪构件。第三带和第四带的第一端部联接到第三致动器,并且第三带和第四带的第二端部联接到第二钳爪构件。第三致动器的运动沿第一方向致动第三带并且沿第二方向致动第四带,以致动末端执行器的第二钳爪。
18.在一些实施例中,引导构件包括第三引导元件和第四引导元件。第三带的中央部分在第三引导元件之上行进并进入轴的内腔。第四带的中央部分在第四引导元件之上行进并进入内腔。第三引导元件从中心轴线垂直偏移第三偏移距离,并且第四引导元件从中心轴线垂直偏移第四偏移距离,第三偏移距离不同于第四偏移距离。
19.在一些实施例中,医疗设备包括医疗器械的轴、末端执行器、外壳、第一致动器、第二致动器、第一带和引导构件。轴包括近端和远端,并且限定了沿着轴的中心轴线从近端延伸到远端的内腔。末端执行器联接到轴的远端,而外壳联接到轴的近端。第一致动器和第二致动器被可旋转地支撑在外壳中。第一带具有第一端部和第二端部,第一端部联接到第一致动器,而第二端部联接到末端执行器。第二带具有第一端部和第二端部,第一端部联接到第一致动器,而第二端部联接到末端执行器。引导构件联接到外壳,并且引导构件的至少一部分在轴的近端处在内腔之上延伸。第一带的中央部分穿过引导构件行进并进入轴的内腔,并且第一带在第一带的第一端部和第一带的中央部分之间沿着第一带的纵向中心线扭转。第二带的中央部分穿过引导构件行进并进入轴的内腔,第二带在第二带的第一端部和第二带的中央部分之间沿着第二带的纵向中心线扭转。第一致动器被配置为沿第一方向移动第一带并沿与第一方向相反的第二方向移动第二带,从而以第一自由度致动末端执行器。第二致动器被配置为沿第一方向移动第一带和第二带,从而以第二自由度致动末端执行器。
20.在一些实施例中,医疗设备还包括第三致动器、第三带、第四带,并且末端执行器包括第一钳爪构件和第二钳爪构件。第一带和第二带的第二端部联接到第一钳爪构件。第三带和第四带的第一端部联接到第三致动器,并且第三带和第四带的第二端部联接到第二钳爪构件。第三致动器的运动沿第一方向致动第三带并沿第二方向致动第四带,以致动末端执行器的第二钳爪。第三带和第四带的中央部分穿过引导构件行进并进入轴的内腔。第三带在第三带的第一端部和中央部分之间沿着第三带的纵向中心线扭转。第四带在第四带
的第一端部和中央部分之间沿着第四带的纵向中心线扭转。在一些实施例中,第一带被扭转大约90度的扭转角。在一些实施例中,第一带通过第一旋转方向扭转,并且第二带也沿第一方向扭转。在一些实施例中,第一带通过第一旋转方向扭转,而第二带通过与第一方向不同的第二旋转方向扭转。在一些实施例中,第一带通过第一旋转方向扭转,并且第三带也沿第一方向扭转。在一些实施例中,第一带通过第一旋转方向扭转,而第三带通过与第一方向不同的第二旋转方向扭转。在一些实施例中,第一带通过第一旋转方向扭转,第二带通过第一旋转方向扭转,第三带通过第二旋转方向扭转,第四带通过第二方向扭转旋转,并且第一旋转方向与第二旋转方向不同。在一些实施例中,第一带通过第一旋转方向扭转,第二带通过第一旋转方向扭转,第三带通过第一旋转方向扭转,第四带通过第一方向扭转扭转,
21.在阅读以下附图和详细描述后,根据实施例的其他医疗设备、相关部件、医疗设备系统和/或方法对于本领域技术人员而言将是显而易见的。包括在本说明书中的所有此类附加医疗设备、相关部件、医疗设备系统和/或方法旨在在本公开的范围内。
附图说明
22.图1是根据实施例的微创远程操作医疗系统用于进行诸如外科手术的医疗手术的平面图。
23.图2是图1所示的微创远程操作外科手术系统的可选的辅助单元的透视图。
24.图3是图1所示的微创远程操作外科手术系统的用户控制台的透视图。
25.图4是图1所示的微创远程操作外科手术系统的包括多个器械的操纵器单元的前视图。
26.图5是根据实施例的包括第一组带和两个致动器的器械的一部分的示意图。
27.图6是图5的器械的上述部分的致动器组件的放大示意图,其描绘了第一致动器的操作状态。
28.图7是图5的器械的上述部分的致动器组件的放大示意图,其描绘了第二致动器的操作状态。
29.图8是根据实施例的包括两组带和四个致动器的器械的一部分的示意图。
30.图9是图8的器械的上述部分的致动器组件的放大示意图,其描绘了第一致动器和第三致动器的操作状态。
31.图10是图8的器械的上述部分的致动器组件的放大示意图,其描绘了第二致动器的操作状态。
32.图11是图8的器械的上述部分的致动器组件的放大示意图,其描绘了第四致动器的操作状态。
33.图12是根据实施例的包括两组带和三个致动器的部分的示意图。
34.图13是图12的器械的上述部分的致动器组件的放大示意图,其描绘了第一致动器的操作状态。
35.图14是图12的器械的上述部分的致动器组件的放大示意图,其描绘了第三致动器的操作状态。
36.图15是图12的器械的上述部分的致动器组件的放大示意图,其描绘了第二致动器的操作状态。
37.图16是根据实施例的外科手术系统的器械的透视图。
38.图17是由图16所示的区域z1指示的器械的远端部分处的末端执行器和腕组件的放大透视图。
39.图18是由图16所示的区域z2指示的器械的近端部分处的致动器组件的放大透视图。
40.图19是图18中的致动器组件的放大透视图,其以透明形式显示外壳和引导构件组件以详细说明部件的内部布置。
41.图20是图18中的致动器组件的透视分解图,其示出了外壳和引导组件从致动器组件的底座移除。
42.图21和图22是图20中的致动器组件的第二致动器的前透视图(图21)和后透视图(图22)。
43.图23和图24是图20中的致动器组件的致动器和带的前透视图(图23)和后透视图(图24)。
44.图25a是根据实施例的第一带附接到图23中的致动器组件的第一致动器的透视分解图。
45.图25b是根据另一实施例的第一带附接到图23中的致动器组件的第一致动器的透视分解图。
46.图26是当第二致动器处于第一位置时图18中的致动器组件的一部分的横截面图,该横截面沿图18中的线x1‑
x1截取。
47.图27是当第二致动器处于第二位置时图18中的致动器组件的一部分的横截面图,该横截面沿图18中的线x1‑
x1截取。
48.图28是图20所示的外壳的放大透视图。
49.图29是联接到如图18所示设备的外壳的放大透视图。
50.图30是致动器组件的一部分的横截面图,该横截面沿图18中的线x2‑
x2截取。
51.图31是由图23中所示的区域z3指示的引导构件组件、带和轴的放大横截面图。
52.图32是根据实施例的致动器组件的透视图,其以透明形式显示外壳和引导构件组件以详细说明部件的内部布置。
53.图33是图32的致动器组件的放大透视图,其示出了外壳和引导组件从底座移除。
54.图34、图35和图36是图32中的致动器组件的第二致动器的前透视图(图34)、侧视图(图35)和俯视图(图36)。
具体实施方式
55.本文描述的实施例可以有利地用于与微创外科手术相关联的各种各样的抓取、切割和操纵操作。
56.本技术的长度守恒机制仅使用四个张力元件就能够实现三个自由度(例如,绕俯仰轴线、偏航轴线和夹持轴线)的运动,从而减少了所需张力元件的总数,减少了轴和腕部内所需的空间,降低了总成本,并实现腕部和轴组件的进一步小型化,从而促进mis手术。此外,本文所述的器械包括能够被移动以用数个自由度致动末端执行器的一个或多个张力带。带能够包括具有更大横截面积以促进增加的强度的区域,或者能够被扭转以允许在器
械的传动内高效行进。
57.如本文中所使用的,术语“大约”在与提及的数字指示结合使用时是指提及的数字指示加上或减去这个提及的数字指示的10%。例如,语言“大约50”涵盖了45到55的范围。类似地,语言“大约5”涵盖了4.5到5.5的范围。
58.与诸如机械结构、部件或部件组件等部分相关联的术语“柔性”应作广义解释。从本质上讲,该术语意味着所述部分可以被反复弯曲并恢复到原始形状而不会损坏所述部分。某些柔性部件也可以是有弹性的。例如,如果部件(例如,挠曲件)具有在弹性变形时吸收能量的能力,并且然后在卸载(即,恢复到其原始状态)时释放储存的能量,则称该部件是有弹性的。许多“刚性”物体由于材料特性而具有轻微的固有弹性“弯曲度”,但是此类物体不被视为如该术语在本文中所用的那样具有“柔性”。
59.如在本说明书和随附权利要求中所使用的,“远侧”一词是指朝向工作部位的方向,而“近侧”一词是指远离工作部位的方向。因此,例如,工具的最靠近目标组织的一端将是工具的远端,而与远端相反的那端(即,由用户操纵或联接到致动轴的那端)将是工具的近端。
60.此外,选择来描述一个或多个实施例及可选的元件或特征部的特定词语并不旨在限制本发明。例如,空间相对术语——例如“下方”、“下面”、“下”、“上面”、“上”、“近侧”、“远侧”等——可用于描述如图中图示的一个元件或特征部与另一个元件或特征部的关系。除了图中所示的位置和取向之外,这些空间相对术语旨在包含使用中或操作中的设备的不同位置(即,平移放置)和取向(即,旋转放置)。例如,如果图中的设备被翻转,被描述为在其他元件或特征部“下面”或“下方”的元件则将在所述其他元件或特征部的“上面”或“之上”。因此,术语“下面”可以包含上面和下面的位置和取向二者。设备可以以其他方式定向(例如,旋转90度或处于其他取向)并且相应地解释本文中使用的空间相对描述符。同样,对沿着(平移)和围绕(旋转)各个轴的运动的描述包括各种空间设备位置和取向。主体的位置和取向的组合定义了主体的姿势。
61.类似地,几何术语(例如,“平行”、“垂直”、“圆形”或“正方形”)并不旨在要求绝对的数学精度,除非上下文另有说明。相反,此类几何术语允许因制造或等效功能而引起的变化。例如,如果一个元件被描述为“圆形”或“大致圆形”,那么这个描述仍然包含不是精确圆形的部件(例如,一个为稍微长椭圆形或多条边的多边形的部件)。
62.此外,除非上下文另有说明,否则单数形式“一”、“一个”和“该”也包括复数形式。术语“包含”、“包括”、“具有”等指定了所述特征、步骤、操作、元件、部件等的存在,但不排除一个或多个其他特征、步骤、操作、元件、部件或组的存在或添加。
63.除非另有说明,术语装置、医疗设备、器械及其变体可以互换使用。
64.本发明的各方面主要根据使用da外科手术系统的实施方式来描述,该外科手术系统由加利福尼亚州桑尼维尔市的直观外科公司(intuitive surgical)商业化。此类外科手术系统的示例是da vinci外科手术系统(is4000型)和da vinci外科手术系统(is3000型)。然而,知识渊博的人将理解,本文公开的发明方面可以以各种方式体现和实现,这些方式包括计算机辅助、非计算机辅助以及手动和计算机辅助实施例和实施方式的混合组合。关于da外科手术系统(例如,is4000型、is3000型、is2000型、is1200型)的实施方式仅作为示例呈现,并且它们不应被视为限制本文公开的发明方面的范围。在
适用的情况下,可以既在相对较小的、手持的、手动操作的设备又在具有附加机械支撑的相对较大的系统中体现和实现本发明的各方面。
65.图1是计算机辅助远程操作系统的平面图。所示的是一种医疗设备,它是微创机器人外科手术(mirs)系统1000(在本文中也称为微创远程操作外科手术系统),其用于对躺在外科手术台1010上的患者p进行微创诊断或外科手术手术。该系统可以具有任意数量的部件,例如供外科医生或其他熟练临床医生s在手术期间使用的用户控制单元1100。mirs系统1000还可以包括操纵器单元1200(通常称为外科手术机器人)和可选的辅助装备单元1150。操纵器单元1200可以包括臂组件1300和可移除地联接到臂组件的工具组件。操纵器单元1200可以在外科医生s查看外科手术部位并通过控制单元1100控制器械1400的运动的同时通过患者p的身体中的微创切口或自然孔口来操纵至少一个可移除地联接的器械1400(本文中也称为“工具”)。外科手术部位的图像由诸如立体内窥镜之类的内窥镜(未示出)获得,内窥镜可由操纵器单元1200操纵以定向该内窥镜。辅助装备单元1150可用于处理外科手术部位的图像,以便随后通过用户控制单元1100显示给外科医生s。一次使用的器械1400的数量通常将取决于诊断或外科手术手术和外科手术室内的空间约束等因素。如果在手术期间有必要更换一个或多个正在使用的器械1400,则助手将器械1400从操纵器单元1200移除,并用外科手术室中的托盘1020中的另一器械1400替换它。尽管被示为与器械1400一起使用,但本文所述的任何器械都可以与mirs 1000一起使用。
66.图2是控制单元1100的透视图。用户控制单元1100包括左眼显示器1112和右眼显示器1114,用于向外科医生s呈现能够实现深度感知的外科手术部位的协调立体视图。用户控制单元1100还包括一个或多个输入控制设备1116,所述输入控制设备又使操纵器单元1200(图1所示)操纵一个或多个工具。输入控制设备1116提供至少与它们相关联的器械1400相同的自由度,以向外科医生s提供远程呈现,或输入控制设备1116与器械1400集成在一起(或直接连接到器械1400)的感知。以此方式,用户控制单元1100为外科医生s提供直接控制器械1400的强烈。为此,可以采用位置传感器、力传感器和触觉反馈传感器(未示出)通过输入控制设备1116将来自器械1400的位置感受、力感受和触觉感受传回外科医生的手。
67.用户控制单元1100在图1中被示为与患者在同一个房间,以便外科医生s能够直接监控手术,必要时亲自到场,并直接与助手交谈,而不是通过电话或其他通信媒介。然而,在另一些实施例中,用户控制单元1100和外科医生s可以在不同的房间、完全不同的建筑物或其他远离患者的允许远程外科手术手术的远程位置中。
68.图3是辅助装备单元1150的透视图。辅助装备单元1150可以与内窥镜(未示出)联接,并且可以包括一个或多个处理器来处理捕获的图像以用于后续显示,例如经由用户控制单元1100显示,或显示在位于本地和/或远程的另一个合适的显示器上。例如,在使用立体内窥镜的情况下,辅助装备单元1150可以处理捕获的图像以经由左眼显示器1112和右眼显示器1114向外科医生s呈现外科手术部位的协调立体图像。这种协调可以包括相对的图像之间的对齐并且可以包括调整立体内窥镜的立体工作距离。作为另一个示例,图像处理可以包括使用先前确定的相机校准参数来补偿图像捕获设备的成像误差,例如光学像差。
69.图4示出了操纵器单元1200的前透视图。操纵器单元1200包括允许操纵器械1400和诸如立体内窥镜之类的用于捕获手术部位的图像的成像设备(未示出)的部件(例如,臂、联动装置、马达、传感器等)。具体地,器械1400和成像设备可以由具有许多接头的远程操作
机构操纵。此外,器械1400和成像设备通过患者p中的切口或自然孔口以使得软件和/或运动学远程运动中心保持在该切口或孔口处的方式被定位和操纵。以此方式,可以最小化切口尺寸。
70.图5
‑
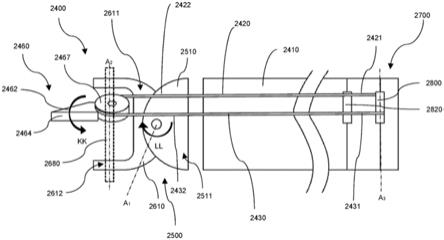
7是根据实施例的器械2400的一部分的示意图。器械2400包括腕组件2500、第一带2420(其充当第一张力构件)、第二带2430(其充当第二张力构件)、末端执行器2460和致动器组件2700。器械2400经配置使得第一带2420和第二带2430的运动产生腕组件2500绕第一旋转轴线a1(其用作俯仰轴线,术语俯仰是任意的)的运动、末端执行器2460绕第二旋转轴线a2(其用作偏航轴线,术语偏航是任意的)的运动或腕组件2500的运动和末端执行器2460的运动二者。尽管被图示为带,但是本技术中讨论的带中的任何一种可以用其他形式的张力构件代替,所述其他形式的张力构件包括但不限于缆线、线材、梁、杆,或带、缆线、线材、梁或杆中的一种或多种的组合。
71.腕组件2500(也称为接头组件)包括第一连杆2510和第二连杆2610。第一连杆2510具有联接到轴2410的近侧部分2511。轴2410可以是将腕组件2500联接到致动器组件2700的任何合适的细长轴。例如,在一些实施例中,轴2410可以是圆柱形轴,第一带2420、第二带2430以及从致动器组件2700行进至腕组件2500的其他部件(例如,电线、地线或诸如此类)设置在该圆柱形轴内。近侧部分2511可以经由任何合适的机构被联接到轴2410。例如,在一些实施例中,近侧部分2511可以配合地设置在轴2410的一部分内(例如,经由干涉配合)。在一些实施例中,近侧部分2511可以包括将近侧部分2511联接到轴2410的一个或多个突起、凹口、开口或连接器。在一些实施例中,近侧部分2511可以焊接、胶粘或熔合到轴2410。
72.第二连杆2610具有近侧部分2611和远端部分2612。近侧部分2611可旋转地联接到第一连杆2510以形成具有第一旋转轴线a1的腕组件2500,第二连杆2610相对于第一连杆2510绕第一旋转轴线a1旋转。腕组件2500可以包括任何合适的联接机构。例如,在一些实施例中,第二连杆2610可以经由在本文中示出和描述的类型的销接接头联接到第一连杆2510。
73.第二连杆2610的远端部分2612包括连接器2680,连接器2680被联接到末端执行器2460的滑轮部分2467,使得末端执行器2460相对于腕组件2500绕第二旋转轴线a2旋转。第二旋转线a2不平行于第一旋转轴线a1。在具有数个工具构件的实施例中,轴线a2不但在工具构件一起旋转时用作偏航轴线(术语偏航是任意的),而且在工具构件彼此相反地旋转时用作夹持轴线。因此,器械2400提供至少三个自由度(即,绕第一旋转轴线a1的俯仰运动、绕第二旋转轴线a2的偏航运动以及绕第二旋转轴线a2的夹持运动)。连接器2680可以是任何合适的连接器以将末端执行器2460可旋转地联接到腕组件2500。例如,在一些实施例中,第一连杆2510和/或第二连杆2610可以包括u形夹和销,例如在名称为“medical instrument electronicly energized using drive cables(使用驱动缆线通电的医疗器械)”的美国专利no.us 9,204,923b2(于2008年7月16日提交)中示出和描述的销接接头,该专利通过引用整体并入本文。在另一些实施例中,第一连杆2510和/或第二连杆2610可以包括顺从机构,例如在名称为“rolling
‑
contact joint mechanisms and methods(滚动接触接头机构和方法)”的国际专利公开no.wo 2016/123139 a2(于2016年1月26日提交)中示出和描述的顺从机构,该专利公开通过引用整体并入本文。在又一些实施例中,腕组件2500可以包括在名称为“medical tools having tension bands(具有张力带的医疗工具)”的国际专利申
请no.pct/us18/64721(于2018年12月10日提交)中示出和描述的任何连接器或特征部,该申请通过引用整体并入本文。
74.末端执行器2460联接到腕组件2500并包括至少一个工具构件2462。工具构件2462可以包括接触部分2464和滑轮部分2467。接触部分2464被配置为在外科手术期间接合或操纵目标组织。例如,在一些实施例中,接触部分2464可以包括用作夹持器、切割器、组织操纵器或诸如此类的接合表面。在另一些实施例中,接触部分2464可以是用于烧灼或电外科手术的通电工具构件。如上所述,滑轮部分2467可旋转地联接到第二连杆2610,使得工具构件2462沿箭头kk的方向相对于腕组件2500绕第二旋转轴线a2旋转。以此方式,工具构件2462的接触部分2464可绕第二旋转轴线a2致动以在外科手术期间接合或操纵目标组织。工具构件2462(或本文所述的任何工具构件)可以是任何合适的医疗工具构件。此外,虽然仅示出了一个工具构件2462,但在另一些实施例中,器械2400可以包括两个移动工具构件,它们协同执行夹持或剪切功能。
75.第一带2420包括近侧部分2421和远侧部分2422,并且第一带2420从致动器组件2700延伸穿过轴2410并进入腕组件2500。第一带2420的近侧部分2421附接到致动器组件2700的第一致动器2800,并且远侧部分2422附接到滑轮部分2467。第二带2430包括近侧部分2431和远侧部分2432,并且第二带2430从致动器组件2700延伸穿过轴2410并进入腕组件2500。第二带2430的近侧部分2431附接到致动器组件2700的第一致动器2800,并且远侧部分2432附接到滑轮部分2467。
76.第一带2420、第二带2430和本文所述的任何带可以具有任何合适的形状。例如,在一些实施例中,本文所述的任何带可具有矩形横截面形状(在正交于带的纵向中心线的横截面平面内截取)。在另一些实施例中,本文所述的任何带可具有梯形形状。在又一些实施例中,本文所述的任何带可以包括略微弯曲的表面。此外,本文所述的任何带可以由任何合适的材料构成。例如,在一些实施例中,第一带2420、第二带2430和本文所述的任何带可由一系列粘接在一起(例如,经由粘合剂)的层压件构成。在另一些实施例中,层压件可以通过任何其他合适的方法结合。层压件可由任何合适的材料构成,这些材料包括钨、钢或任何合适的聚合物。这些带可以类似于名称为“medical tools having tension bands(具有张力带的医疗工具)”的国际专利申请no.pct/us18/64721(于2018年12月10日提交)中示出和描述的任何带,该申请通过引用整体并入本文。
77.如图6和图7所示,致动器组件2700(其可用作传动或后端组件)产生第一带2420和第二带2430的运动,第一带2420和第二带2430操作以在腕组件2500处产生期望的铰接运动(俯仰、偏航或夹持)。因此,如本文所述,致动器组件2700包括用于沿近侧方向移动一个带(即,拉入某个带)同时允许向远侧移动(即,释放或“松开”)其他带的部件和控件。致动器组件2700还可沿相同方向移动第一带2420和第二带2430二者。以此方式,致动器组件2700可以在这些带内保持期望的张力,从而在腕组件2500处产生期望的运动。此外,在一些实施例中,致动器组件2700可以确保在腕组件2500的整个运动范围内带的长度是守恒的(即,等量移动)。
78.具体地,致动器组件2700包括外壳2760、第一致动器2800和第二致动器2820。外壳2760(其用作底盘)提供结构支撑,用于安装和对齐致动器组件2700的部件。例如,外壳2760可以限定用于安装轴或其他部件的开口、突起和/或支架。第一致动器2800经由第一致动器
支撑构件2801安装到致动器组件2700(例如,在外壳2760内)。例如,第一致动器支撑构件2801可以是安装件、轴或任何其他合适的支撑结构以将第一致动器2800固定到致动器组件2700。在一些实施例中,第一带2420的近侧部分2421在第一位置处附接到第一致动器2800,并且第二带2430的近侧部分2431在不同于第一位置的第二位置处附接到第一致动器2800。近侧部分2421和近侧部分2431都可以经由一个或多个紧固件附接到第一致动器2800。例如,第一带2420的近侧部分2421和第二带2430的近侧部分2431可以通过螺栓或螺钉固定到第一致动器2800。
79.如图5
‑
7所示,第二致动器2820经由第二致动器支撑构件2821安装到致动器组件2700(例如,在外壳2760内)。例如,第二致动器支撑构件2821可以是安装件、轴或任何其他合适的支撑结构以将第二致动器2820固定到致动器组件2700。在一些实施例中,第二致动器2820是线性致动器,其可操作以在箭头dd所示的方向上产生线性运动。对于第一带2420和第二带2430,第二致动器2820的行进方向与箭头bb和cc指示的行进方向不平行(即,包括垂直于箭头bb和cc的行进分量)。在另一些实施例中,第二致动器2820包括可操作以在箭头dd的方向上产生线性运动的杠杆或凸轮。
80.第二致动器2820包括具有第一引导表面2823和第二引导表面2824的引导结构2822。第一引导表面2823与第一带2420的近侧部分2421接触。第二引导表面2824与第二带2430的近侧部分2431接触。以这种方式,如本文所述,第二致动器2820的运动将产生第一带2420和第二带2430的运动。此外,这种移动可以独立于由第一致动器2800产生的第一带2420和第二带2430的运动。第一引导表面2823和第二引导表面2824可以是任何合适的表面并且可以包括任何合适的特征部以接触第一带2420和第二带2430并将移动赋予第一带2420和第二带2430。在一些实施例中,当第二致动器2820在沿如下所述的箭头dd的方向被致动并移动之前处于中间位置时,第一带2420的近侧部分2421可以与第一引导表面2823间隔开,并且第二带2430的近侧部分2431可以与第二引导表面2824间隔开。
81.由第一致动器2800产生的运动被平移到第一带2420的近侧部分2421和第二带2430的近侧部分2431。在一些实施例中,第一致动器2800可操作以产生绕第一致动器轴线a3在箭头aa的方向上的旋转运动。近侧部分2421可以以第一取向附接到第一致动器2800,并且近侧部分2431可以以与第一取向相反的第二取向附接到第一致动器2800,使得当第一致动器2800沿箭头aa的方向旋转时,第一带2420沿箭头bb的方向在远侧方向上移动(即,释放),同时第二带2430沿箭头cc的方向在近侧方向上移动(即,拉动)。被释放的第一带2420的长度可以与被拉动或收起的第二带2430的长度相同,以确保在腕组件2500的整个运动范围内带的长度可以守恒(即,等量移动)。在另一些实施例中,第一致动器2800可以被配置为线性致动器以分别沿箭头bb和cc所示的方向移动第一带2420和第二带2430。
82.当第一带2420沿箭头bb的方向移动并且第二带2430沿箭头cc的方向移动时,第一带2420的远侧部分2422被送入滑轮部分2467,同时第二带2430的远侧部分2432从滑轮部分2467收起,从而导致滑轮部分2467和工具构件2462沿图5中箭头kk所示的方向绕第二旋转轴线a2旋转。相反,当第一致动器2800沿与图6中箭头aa相反的方向旋转时,第一带2420的远侧部分2422从滑轮部分2467收起,并且第二带2430的远侧部分2432被送入滑轮部分2467,从而推动滑轮部分2467和工具构件2462沿与图5中箭头kk相反的方向绕第二旋转轴线a2旋转。
83.当第二致动器2820沿箭头dd的方向移动时,如图7所示,第一带2420和第二带2430二者在致动器组件2700外部的长度被收起。随着长度被收起,第一带2420的远侧部分2422和第二带2430的远侧部分2432沿箭头cc的方向移动。远侧部分2422和远侧部分2432的运动继而在滑轮2467上施加力并且推动第二连杆2610沿箭头ll的方向绕第一旋转轴线a1旋转。因此,第一致动器2800、第二致动器2820和一组带(第一带2420和第二带2430)的组合可操作以至少以2个自由度(例如,俯仰和偏航)控制器械2400的末端执行器2460和腕组件2500。
84.如上所述,尽管图5中的末端执行器2460被示为仅具有一个工具构件2462,但可以提供两个(或更多)工具构件并且可以相对于第二连杆2610固定地或可旋转地安装第二工具构件。例如,图8
‑
11是根据实施例的器械3400的各个部分的示意图。器械3400包括腕组件3500、第一带3420(其充当第一张力构件)、第二带3430(其充当第二张力构件)、第三带3440(其充当第三张力构件)、第四带3450(其充当第四张力构件)、末端执行器3460和致动器组件3700。末端执行器3460可以包括联接到第一滑轮部分3467的第一工具构件3462和联接到第二滑轮部分3477的第二工具构件3472。虽然被示为包括第一带3420、第二带3430、第三带3440和第四带3450,但在另一些实施例中,可以采用如本文所述的其他形式的张力构件。
85.腕组件3500(也称为接头组件)包括第一连杆3510和第二连杆3610。第一连杆3510具有联接到轴3410的近侧部分3511。轴3410可以是任何合适的细长轴,例如上面参照轴2410描述的那些。第二连杆3610具有近侧部分3611和远端部分3612。近侧部分3611可旋转地联接到第一连杆3510以形成具有第一旋转轴线a1(其用作俯仰轴线,术语俯仰是任意的)的腕组件3500,第二连杆3610相对于第一连杆3510绕第一旋转轴线a1旋转。腕组件3500可以包括本文中示出和描述的任何合适的联接机构。第二连杆3610的远端部分3612包括连接器3680,连接器3680被联接到第一工具构件3462的第一滑轮部分3467和第二工具构件3472的第二滑轮部分3477。第一滑轮部分3467和第二滑轮部分3477被联接以相对于腕组件3500绕第二旋转轴线a2独立地或一致地旋转。第二旋转轴线a2不平行于第一旋转轴线a1。轴线a2不但在第一工具构件3462和第二工具构件3472一起旋转时用作偏航轴线(术语偏航是任意的),而且在第一工具构件3462和第二工具构件3472彼此相反地旋转时用作夹持轴线。连接器3680可以是任何合适的连接器以将末端执行器3460可旋转地联接到如本文所述的腕组件3500。
86.第一工具构件3462可以包括接触部分3464并且第二工具构件3472可以包括接触部分3474。接触部分3464、3474被配置为在外科手术期间接合或操纵目标组织。例如,接触部分3464、3474可以包括用作夹持器、切割器、组织操纵器或诸如此类的接合表面。在另一些实施例中,接触部分3464、3474可以是用于烧灼或电外科手术的通电工具构件。如上所述,第一工具构件3462和第二工具构件3472可旋转地联接到第二连杆3610,使得第一工具构件3462和第二工具构件3472可以相对于腕组件3500绕第二旋转轴线a2旋转。以此方式,第一工具构件3462的接触部分3464可以沿箭头kk的方向被致动,并且第二工具构件3472的接触部分3474可以沿与箭头kk相反的方向被致动以使接触部分3464、3474靠得更近,从而在外科手术期间抓取、切割、接合或操纵目标组织。相反,第一工具构件3462的接触部分3464可以沿与箭头kk相反的方向被致动,并且第二工具构件3472的接触部分3474可以沿箭头kk的方向被致动以将接触部分3464、3474彼此分离并释放目标组织。
87.如图8所示,第一滑轮部分3467联接到第一带3420的远侧部分3422和第二带3430
的远侧部分3432。第二滑轮部分3477联接到第三带3440的远侧部分3442和第四带3450的远侧部分3452。第一带3420、第二带3430、第三带3440和第四带3450中的每一个从它们各自的远侧部分延伸出腕组件3500、穿过轴3410并进入致动器组件3700。
88.如图9
‑
11所示,致动器组件3700(其可用作传动组件)产生第一带3420和第二带3430(统称为第一组带)的运动和/或产生第三带3440和第四带3450(统称为第二组带)的运动。以此方式,带的不同移动组合操作以在腕组件3500处产生期望的铰接运动(俯仰、偏航或夹持)。因此,如本文所述,致动器组件3700在每一组带中包括用于沿近侧方向移动一个带(即,拉入某个带)同时允许向远侧移动(即,释放或“松开”)其他带的部件和控件。致动器组件3700还可沿相同方向移动第一组带或第二组带中的两个带。以此方式,致动器组件3700可以经由带生成期望的扭矩以在腕组件3500处产生期望的运动。此外,在一些实施例中,致动器组件3700可以确保在腕组件3500的整个运动范围内带的长度是守恒的(即,等量移动)。
89.具体地,致动器组件3700包括外壳3760、第一致动器3800、第二致动器3820、第三致动器3840和第四致动器3860。外壳3760(用作底盘)提供结构支撑,用于安装和对齐致动器组件3700的部件。例如,外壳3760可以限定用于安装轴或其他部件的开口、突起和/或支架。第一致动器3800经由第一致动器支撑构件3801安装到致动器组件3700,第二致动器3820经由第二致动器支撑构件3821安装到致动器组件3700,第三致动器3840经由第三致动器支撑构件3841安装到致动器组件3700,并且第四致动器3860经由第四致动器支撑构件3861安装到致动器组件3700。如本文所述,支撑构件3801、3821、3841、3861可以是将支撑构件固定到致动器组件3700同时使相应的致动器能够将旋转和/或线性运动传递到一个或多个附接的带的任何合适的支撑结构。
90.如图9所示,第一带3420的近侧部分3421在第一位置处被附接到第一致动器3800,并且第二带3430的近侧部分3431在不同于第一位置的第二位置处被附接到第一致动器3800。近侧部分3421和近侧部分3431都可以经由一个或多个如本文所述的紧固件附接到第一致动器3800。第三带3440的近侧部分3441在第一位置处被附接到第三致动器3840,并且第四带3450的近侧部分3451在不同于第一位置的第二位置处被附接到第三致动器3840。近侧部分3421和近侧部分3431都可以经由一个或多个如本文所述的紧固件附接到第三致动器3840。
91.联接到第一带3420和第二带3430的第一致动器3800的操作与联接到第一带2420和第二带2430的第一致动器2800的操作类似,如上面参照图5和图6描述的。例如,由第一致动器3800产生的绕第一致动器轴线a3在箭头aa的方向上的运动推动第一带3420沿箭头bb的方向移动并且推动第二带3430沿箭头cc的方向移动,如图9所示。第一带3420和第二带3430的运动又推动第一滑轮部分3467和第一工具构件3462相对于腕组件3500沿箭头kk的方向绕第二旋转轴线a2旋转。相反,第一致动器3800在与箭头aa相反的方向上的旋转推动第一滑轮部分3467和第一工具构件3462在与图9中的箭头kk相反的方向上旋转。
92.联接到第三带3440和第四带3450的第三致动器3840的操作类似于第一致动器3800对第一带3420和第二带3430的操作。例如,由第三致动器3840产生的绕第三致动器轴线a4在箭头ee的方向上的运动推动第二滑轮部分3477和第二工具构件3472相对于腕组件3500沿箭头kk的方向绕第二旋转轴线a2旋转。相反,第三致动器3840在与箭头ee相反的方
向上的旋转推动第二滑轮部分3477和第二工具构件3472在与图9中箭头kk相反的方向上旋转。
93.在一种操作状态下,第一致动器3800和第三致动器3840都可以被操作以一起致动(即,对于第一致动器3800和第三致动器3840,分别沿箭头aa和箭头ee的方向一起致动,或沿与箭头相反的方向一起致动),从而推动第一滑轮部分3467和第二滑轮部分3477沿箭头kk的方向一起旋转,或沿与箭头kk相反的方向一起旋转,从而实现对第一工具构件3462和第二工具构件3472绕第二旋转轴线a2(例如,偏航)的控制。在另一种操作状态下,第一致动器3800和第三致动器3840都可以被操作以沿相反的方向被致动(即,对于第一致动器3800,沿箭头aa的方向,而对于第三致动器3840,沿与箭头ee相反的方向),从而推动第一滑轮部分3467和第二滑轮部分3477二者绕第二旋转轴线a2沿相反的方向旋转,以便使第一工具构件3462和第二工具构件3472更加靠近在一起或分开,从而实现绕第二旋转轴线a2(例如,夹持)的第二dof。在又一种操作状态下,第一致动器3800或第三致动器3840中的一个被致动(即,对于第一致动器3800,沿箭头aa的方向,或者对于第三致动器3840,沿与箭头ee相反的方向),同时第一工具构件3462或第二工具构件3472中的另一个保持静止。在这种状态下,与静止致动器相关联的工具构件可保持在固定位置处,而与活动致动器相关联的另一个工具构件朝向固定工具构件移动,这对于在用两个工具构件抓取、剪切或烧灼之前需要持续接触或支撑目标组织的某些手术可能是有益的。鉴于本公开,经由控制第一致动器3800或第三致动器3840中的一者或二者来同时进行偏航和夹持致动的其他组合对于本领域技术人员而言将是显而易见的。
94.参照图9和图10,第二致动器3820包括具有第一引导表面3823和第二引导表面3824的引导结构3822。第一引导表面3823和第二引导表面3824可以相对于第二致动器3820的中心轴线沿纵向方向彼此间隔开。第一引导表面3823与第一带3420的近侧部分3421接触。第二引导表面3824与第二带3430的近侧部分3431接触。在一些实施例中,当第二致动器3820在沿如图10所示箭头dd的方向被致动并移动之前处于中间位置时,第一带3420的近侧部分3421可以与第一引导表面3823间隔开,并且第二带3430的近侧部分3431可以与第二引导表面3824间隔开。第二致动器3820对第一带3420和第二带3430的操作类似于第二致动器2820对第一带2420和第二带2430的操作。例如,第二致动器3820是线性致动器,其可操作以沿箭头dd所示的方向产生线性运动。对于第一带3420和第二带3430,第二致动器3820的行进方向与图9中箭头bb和cc指示的行进方向不平行(即,包括垂直于箭头bb和cc的行进分量)。在另一些实施例中,第二致动器3820包括可操作以沿箭头dd的方向产生线性运动的杠杆或凸轮。
95.当第二致动器3820沿箭头dd的方向移动时,如图10所示,第一带3420和第二带3430二者在致动器组件3700外部的的长度被收起。随着长度被收起,第一带3420的远侧部分3422和第二带3430的远侧部分3432沿箭头cc的方向移动。远侧部分3422、3432的运动继而在第一滑轮3467上施加力并且推动第二连杆3610沿箭头ll的方向绕第一旋转轴线a1旋转。
96.参照图9和图11,第四致动器3860包括具有第一引导表面3863和第二引导表面3864的引导结构3862。第一引导表面3863和第二引导表面3864可以相对于第四致动器3860的中心轴线沿纵向方向彼此间隔开。第一引导表面3863与第三带3440的近侧部分3441接
触。第二引导表面3864与第四带3450的近侧部分3451接触。在一些实施例中,当第四致动器3860在沿如图11所示箭头ff的方向被致动并移动之前处于中间位置时,第三带3440的近侧部分3441可以与第一引导表面3863间隔开,并且第四带3450的近侧部分3451可以与第二引导表面3864间隔开。第四致动器3860对第三带3440和第四带3450的操作类似于第二致动器3820对第一带3420和第二带3430的操作。例如,第四致动器3860是线性致动器,其可操作以沿箭头ff所示的方向产生线性运动。对于第三带3440和第四带3450,第四致动器3860的行进方向与图9中箭头bb和cc指示的行进方向不平行(即,包括垂直于箭头bb和cc的行进分量)。在另一些实施例中,第四致动器3860包括可操作以沿箭头ff的方向产生线性运动的杠杆或凸轮。
97.当第四致动器3860沿箭头ff的方向移动时,如图11所示,第三带3440和第四带3450二者在致动器组件3700外部的的长度被收起。随着长度被收起,第三带3440的远侧部分3442和第四带3450的远侧部分3452沿箭头cc的方向移动。远侧部分3442和远侧部分3452的运动继而在第二滑轮3477上施加力并且推动第二连杆3610沿与箭头ll相反的方向绕第一旋转轴线a1旋转。通过在第二致动器3820和第四致动器3860之间交替致动,第二连杆3610可操作以绕第一旋转轴线a1来回枢转(例如,俯仰,术语俯仰是任意的)。因此,至少四个致动器(第一致动器3800、第二致动器3820、第三致动器3840和第四致动器3860)、第一组带(第一带3420和第二带3430)和第二组带(第三带3440和第四带3450)的组合可操作以向器械3400的末端执行器3460和腕组件3500提供至少3个dof(例如,俯仰、偏航和夹持)。
98.尽管致动器组件3700被示为具有与第四致动器3860分离的第二致动器3820,但在另一些实施例中,致动器组件可以包括致动器的任何合适布置。例如,图12
‑
15是根据实施例的器械4400的各个部分的示意图。器械4400包括腕组件4500、第一带4420(其充当第一张力构件)、第二带4430(其充当第二张力构件)、第三带4440(其充当第三张力构件)、第四带4450(其充当第四张力构件)、末端执行器4460和致动器组件4700。末端执行器4460可以包括联接到第一滑轮部分4467的第一工具构件4462和联接到第二滑轮部分4477的第二工具构件4472。尽管被示为包括第一带4420、第二带4430、第三带4440和第四带4450,但在另一些实施例中,可以采用如本文所述的其他形式的张力构件。
99.腕组件4500(也称为接头组件)包括第一连杆4510和第二连杆4610。第一连杆4510具有联接到轴4410的近侧部分4511。轴4410可以是任何合适的细长轴,例如上面参照轴2410描述的那些。第二连杆4610具有近端部分4611和远端部分4612。近端部分4611可旋转地联接到第一连杆4510以形成具有第一旋转轴线a1(其用作俯仰轴线,术语俯仰是任意的)的腕组件4500,第二连杆4610相对于第一连杆4510绕第一旋转轴线a1旋转。腕组件4500可以包括本文示出和描述的任何合适的联接机构。第二连杆4610的远端部分4612包括连接器4680,该连接器联接到第一工具构件4462的第一滑轮部分4467和第二工具构件4472的第二滑轮部分4477。第一滑轮部分4467和第二滑轮部分4477被联接以相对于腕组件4500绕第二旋转轴线a2独立地或一致地旋转。第二旋转轴线a2不平行于第一旋转轴线a1。轴线a2不但在第一工具构件4462和第二工具构件4472一起旋转时用作偏航轴线(术语偏航是任意的),而且在第一工具构件4462和第二工具构件4472彼此相反地旋转时用作夹持轴线。连接器4680可以是任何合适的连接器以将末端执行器4460可旋转地联接到如本文所述的腕组件4500。
100.第一工具构件4462可以包括接触部分4464并且第二工具构件4472可以包括接触
部分4474。接触部分4464、4474被配置为在外科手术期间接合或操纵目标组织。例如,接触部分4464、4474可以包括用作夹持器、切割器、组织操纵器或诸如此类的接合表面。在另一些实施例中,接触部分4464、4474可以是用于烧灼或电外科手术的通电工具构件。如上所述,第一工具构件4462和第二工具构件4472可旋转地联接到第二连杆4610,使得第一工具构件4462和第二工具构件4472可以相对于腕组件4500绕第二旋转轴线a2旋转。以此方式,第一工具构件4462的接触部分4464可以沿箭头kk的方向被致动,并且第二工具构件4472的接触部分4474可以沿与箭头kk相反的方向被致动以使接触部分4464、4474靠得更近,从而在外科手术期间抓取、切割、接合或操纵目标组织。相反,第一工具构件4462的接触部分4464可以沿与箭头kk相反的方向被致动,并且第二工具构件4472的接触部分4474可以沿箭头kk的方向被致动以分离接触部分4464、4474并释放目标组织。
101.如图12所示,第一滑轮部分4467联接到第一带4420的远侧部分4422和第二带4430的远侧部分4432。第二滑轮部分4477联接到第三带4440的远侧部分4442和第四带4450的远侧部分4452。第一带4420、第二带4430、第三带4440和第四带4450中的每一个从它们各自的远侧部分延伸出腕组件4300、穿过轴4410并进入致动器组件4700。
102.如图13
‑
15所示,致动器组件4700(其可用作传动组件)产生第一带4420和第二带4430(统称为第一组带)的运动和/或产生第三带4440和第四带4450(统称为第二组带)的运动。以此方式,带的不同移动组合操作以在腕组件4500处产生期望的接头运动(俯仰、偏航或夹持)。因此,如本文所述,致动器组件4700在每一组带中包括用于沿近侧方向移动一个带(即,拉入某个带)同时允许向远侧移动(即,释放或“松开”)其他带的部件和控件。致动器组件4700还可沿相同方向移动第一组带或第二组带中的两个带。以此方式,致动器组件4700可以在带内保持期望的张力以在腕组件4500处产生期望的运动。此外,在一些实施例中,致动器组件4700可以确保在腕组件4500的整个运动范围内带的长度是守恒的(即,等量移动)。
103.具体地,致动器组件4700包括外壳4760、第一致动器4800、第二致动器4820、第三致动器4840。外壳4760(用作底盘)提供结构支撑,用于安装和对齐致动器组件4700的部件。第一致动器4800经由第一致动器支撑构件4801安装到致动器组件4700,第二致动器4820经由第二致动器支撑构件4821安装到致动器组件4700,并且第三致动器4840经由第三致动器支撑构件4841安装到致动器组件4700。如本文所述,支撑构件4801、4821和4841可以是将支撑构件固定到致动器组件4700并使相应的致动器能够将旋转和/或线性运动传递到一个或多个附接的带的任何合适的支撑结构。
104.如图13所示,第一带4420的近侧部分4421在第一位置处被附接到第一致动器4800,并且第二带4430的近侧部分4431在不同于第一位置的第二位置处被附接到第一致动器4800。近侧部分4421、4431都可以经由一个或多个如本文所述的紧固件附接到第一致动器4800。第三带4440的近侧部分4441在第一位置处被附接到第三致动器4840,并且第四带4450的近侧部分4451在不同于第一位置的第二位置处被附接到第三致动器4840。近侧部分4441、4451都可以经由一个或多个如本文所述的紧固件附接到第三致动器4840。
105.联接到第一带4420和第二带4430的第一致动器4800的操作与联接到第一带3420和第二带3430的第一致动器3800的操作(如上面参照图8和图9描述的)类似(这又类似于上面参照图5和图6描述的第一致动器2800、第一带2420和第二带2430的操作)。例如,由第一
致动器4800产生的绕第一致动器轴线a3沿箭头aa的方向的运动推动第一带4420沿箭头bb的方向移动并且推动第二带4430沿箭头cc的方向移动,如图13所示。第一带4420和第二带4430的运动又推动第一滑轮部分4467和第一工具构件4462相对于腕组件4500沿箭头kk的方向绕第二旋转轴线a2旋转。相反,第一致动器4800在与箭头aa相反的方向上的旋转推动第一滑轮部分4467和第一工具构件4462在与图12中的箭头kk相反的方向上旋转。
106.联接到第三带4440和第四带4450的第三致动器4840的操作类似于第三致动器3840对第三带3440和第四带3450的操作(如上面参照图8和图9描述的)。例如,由第三致动器4840产生的绕第三致动器轴线a4在箭头ee的方向上的运动推动第二滑轮部分4477和第二工具构件4472围绕第二滑轮部分4477和第二工具构件4472相对于腕组件4500沿箭头kk的方向绕第二旋转轴线a2旋转。相反,第三致动器4840在与箭头ee相反的方向上的旋转推动第二滑轮部分4477和第二工具构件4472在与图12中箭头kk相反的方向上旋转。
107.参照图13
‑
15,第二致动器4820包括具有第一引导表面4823、第二引导表面4824、第三引导表面4825和第四引导表面4826的引导结构4822。第一引导表面4823与第一带4420的近侧部分4421接触。第二引导表面4824与第二带4430的近侧部分4431接触。第三引导表面4825与第三带4440的近侧部分4441接触。第四引导表面4826与第四带4450的近侧部分4451接触。在一些实施例中,在第二致动器4820在沿如图14和图15所示的箭头ff的方向或箭头gg的方向被致动之前处于中间位置时,第一引导表面4823、第二引导表面4824、第三引导表面4825和第四引导表面4826中的每一个可以与其各自的带间隔开。在一些实施例中,第一引导表面4823和第二引导表面4824可以位于引导结构4822的第一侧。第三引导表面4825和第四引导表面4826可以位于引导结构4822的与第一侧相反的第二侧。第一引导表面4823和第二引导表面4824可以沿着第二致动器轴线a5在纵向方向上彼此间隔开。第三引导表面4825和第四引导表面4826可以沿着第二致动器轴线a5在纵向方向上彼此间隔开。
108.在一些实施例中,第二致动器4820可以是线性致动的、安装到第二致动器支撑构件4821以沿如图14和图15所示的箭头ff和gg的方向平移。对于第一带4420、第二带4430、第三带4440和第四带4450,箭头ff和gg的方向均不平行于由箭头bb和cc指示的行进方向。
109.第二致动器支撑构件4821可安装至致动器组件4700的底座,或可固定至致动器组件4700的轨道或引导件,以使得第一引导表面4823和第二引导表面4824能够沿图13所示的箭头ff和gg的方向移动。在一些实施例中,第二致动器4820可以具有中间位置,如图13所示,其中第一引导表面4823和第二引导表面4824不作用于或不接触第一带4420、第二带4430、第三带4440或第四带4450中的任一个。
110.在如图14所示的第二致动器4820的第一活动位置中,第二致动器4820的第一引导表面4823和第二引导表面4824在箭头ff的方向上被推动,从而分别压靠在第一带4420的近侧部分4421和第二带4430的近侧部分4431上。当第一引导表面4823压靠在近侧部分4421上并且第二引导表面4824压靠在近侧部分4431上时,第一带4420和第二带4430二者在致动器组件4700外部的长度被收起。随着长度被收起,第一带4420的远侧部分4422和第二带4430的远侧部分4432沿箭头cc的方向移动。远侧部分4422和远侧部分4432的运动继而在第一滑轮部分4467上施加力并且推动第二连杆4610沿箭头ll的方向绕第一旋转轴线a1旋转。
111.在如图15所示的第二致动器4820的第二活动位置中,第二致动器4820的第三引导表面4825和第四引导表面4826在箭头gg的方向上被推动,压靠在第三带4440的近侧部分
4441和第四带4450的近侧部分4451上。当第三引导表面4825压靠在近侧部分4441上并且第四引导表面4826压靠在近侧部分4451上时,第三带4440和第四带4450在致动器组件4700外部的长度被收起。随着长度被收起,第三带4440的远侧部分4442和第四带4450的远侧部分4452沿箭头cc的方向移动。远侧部分4442和远侧部分4452的运动继而在第二第一滑轮部分4477上施加力并且推动第二连杆4610沿箭头ll的方向绕第一旋转轴线a1旋转。
112.通过在第二致动器4820的第一活动位置和第二活动位置之间交替致动,第二连杆4610可操作以绕第一旋转轴线a1来回枢转(例如,俯仰,术语俯仰是任意的)。因此,三个致动器(第一致动器4800、第二致动器4820和第三致动器4840)、第一组带(第一带4420和第二带4430)和第二组带(第三带4440和第四带4450)的组合可操作以向器械4400的末端执行器4460和腕组件4500提供至少3个dof(例如,俯仰、偏航和夹持)。
113.图16
‑
31是根据实施例的器械5400的各种视图。在一些实施例中,器械5400或其中的任何部件可选地是进行微创外科手术的外科手术组件的部分,并且其可以包括患者侧远程操作操纵器单元、一个或多个运动学联动装置、一个或多个插管或诸如此类。例如,器械5400可以联接到mirs系统(例如,参照上述的图1
‑
4描述的mirs系统1000)并可与其一起操作。器械5400包括致动器组件5700(用作传动或后端机构)、轴5410、腕组件5500和末端执行器5460。器械5400还包括将致动器组件5700联接到腕组件5500的第一带5420、第二带5430、第三带5440和第四带5450。腕组件5500可以类似于本文示出和描述的任何腕组件。末端执行器5460可以包括任何合适的工具构件并且可类似于本文所述的任何末端执行器。例如,末端执行器可以包括形成一对抓取器的第一工具构件5462和第二工具构件5472。第一工具构件5462可以包括接触部分5464和滑轮部分5467。类似地,第二工具构件5472可以包括接触部分5474和滑轮部分5477。
114.轴5410可以是将腕组件5500联接到致动器组件5700的任何合适的细长轴。具体地,轴5410包括联接到致动器组件5700的近端5411和联接到腕组件5500(例如,腕组件5500的近侧连杆,其类似于上述的近侧或第一连杆2510、3510、4510)的远端5412。轴5410限定内腔5413(见图30)或数个通道,带及其他部件(例如,电线、地线等)可通过这些通道从致动器组件5700行进到腕组件5500。器械5400经配置使得带的运动可以产生腕组件5500绕接头轴线a
11
的旋转(例如,类似于上述绕俯仰轴线a1的旋转)、末端执行器5460绕旋转轴线a
12
的旋转(例如,类似于上述绕轴线a2(也称为偏航轴线)的旋转)、末端执行器5460的工具构件绕轴线a
12
的夹持旋转或这些运动的任何组合。可以通过操纵致动器组件5700内的带来改变器械5400的俯仰、偏航或夹持。
115.致动器组件5700包括底座5710和外壳5760,并且外壳5760可以经由一个或多个紧固构件附接到底座5710。例如如20图所示,紧固构件可以是销5761和安装孔5711的组合,然而,可以使用任何合适的紧固件将外壳5760固定到底座5710。在一些实施例中,底座5710和外壳5760可以部分地包封或完全地包封设置在致动器组件5700内的部件。底座5710和外壳5760提供结构支撑,用于安装和对齐致动器组件5700的部件。例如,参照图30,底座5710限定了轴开口5712,轴5410的近端5411安装在轴开口5712内。底座5710进一步限定了一个或多个轴承表面或开口5713,致动器安装在所述轴承表面或开口5713内并且可旋转地支撑在所述轴承表面或开口5713内。在一些实施例中,外壳5760包括其中安装有致动器的一个或多个轴承表面或开口5763。外壳5760的开口5763可以与底座的开口5713轴向对齐。参照图
26和图27,致动器组件5700限定了将致动器组件5700一分为二的组件中心线cl
a
。组件中心线cl
a
从轴开口5712的中心线和开口5713的中心线延伸,第二致动器5820的第一安装部分安装在开口5713内(如下所述)。类似地陈述的,组件中心线cl
a
与轴开口5412的中心线和第二致动器5820的中心旋转轴线a
14
共面。如本文更详细描述的,在某些操作条件下,带的中心线与组件中心线cl
a
重合,而在另一些操作条件下,带的中心线稍微偏移(或不平行于)组件中心线cl
a
。
116.除了为致动器组件5700的内部部件提供安装支撑之外,底座5710可以包括与驱动设备(未示出)的对接端口相接的外部特征部(例如,凹口、夹子等)。驱动设备可以是例如可以接收和操纵器械5400以进行各种外科手术的手持系统或计算机辅助远程操作系统。驱动设备可以包括一个或多个马达以驱动致动器组件5700的致动器。在另一些实施例中,驱动设备可以是能够接收和操纵器械5400以进行各种手术的组件。
117.具体地,参照图18
‑
24,致动器组件5700包括第一致动器5800、第二致动器5820和第三致动器5840。第一致动器5800、第二致动器5820和第三致动器5840中的每一个被可旋转地支撑在相应的开口(例如底座5710的开口5713(图30中所示))内以及外壳5760的对应开口5763内。第一致动器5800、第二致动器5820和第三致动器5840中的每一个可以由驱动设备中的相应马达驱动。例如,第一致动器5800可以被驱动以绕第一致动器轴线a
13
旋转,第二致动器5820可以被驱动以绕第二致动器轴线a
14
(也称为中心旋转轴线)旋转,并且第三致动器5840可以被驱动以绕第三致动器轴线a
15
旋转。
118.如图23
‑
25b和图30所示,第一致动器5800包括轴,第一带5420的第一端部5421和第二带5430的第一端部5431缠绕在该轴上。以这种方式,例如,第一带5420从第一致动器5800的一侧切向延伸并且第二带5430从第一致动器5800的另一侧切向延伸,如图24中更详细地示出的。第一带5420和第二带5430的第一端部经由紧固件机构固定到第一致动器5800。具体来说,如图25a所示,第一带5420的第一端部5421包括用于接收紧固件5900的通孔5424。第一致动器5800的轴可以包括螺纹安装孔5801。紧固件5900穿过通孔5424插入并拧进螺纹安装孔5801以将第一带5420固定到第一致动器5800。垫圈5910可以可选地插在紧固件5900和第一端部5421之间以改善紧固件5900和第一带5420之间的接触。在一些实施例中,如图25b所示,第一致动器5800的轴可以包括钩部5801’,并且第一端部5421可以包括用于接收钩部5801’的相应袋或开口5424’。尽管第一带5420和第二带5430被示为使用机械紧固件联接到第一致动器5800,但是在另一些实施例中,可以使用用于将第一带5420和第二带5430紧固到第一致动器5800(或将第三带5440和第四带5450紧固到第三致动器5840)的任何合适的机构。例如,在一些实施例中,带可以经由粘合剂、经由焊接或通过具有与由致动器限定的配合开口形成干涉配合的突起而联接到它们各自的致动器。
119.第一带5420和第二带5430联接到滑轮部分5467以控制第一工具构件5462。具体地,第一带5420和第二带5430从第一致动器5800穿过第二致动器5820并在外壳5760的引导构件5770之上行进。如本文更详细地描述的,引导构件5770改变第一带5420和第二带5430的纵向中心线的方向,使得第一带5420的中央部分5423和第二带5430的中央部分5433被导引到轴5410的近端5411处的开口中。具体地,参照图30,第一带5420的纵向中心线cl1和第二带5430的纵向中心线(在图30中未标识以保持清晰,但类似于针对第一带5420所示的)由引导构件5770重定向达大约90度的角度。尽管带的方向(或“弯曲”)的变化量被示为九十
度,但在另一些实施例中,引导构件可以将第一带5420和第二带5430的纵向中心线重定向达任何合适的弯曲角度,例如,诸如45度和135度之间的弯曲角度、60度和120度之间的弯曲角度或75度和105度之间的弯曲角度。
120.第一带5420和第二带5430基本上平行于轴5410的纵向轴线从近端5411延伸穿过轴5410的内腔5413至远端5412。例如,第一带5420的第二端部5422和第二带5430的第二端部5432从轴5410的远端5412行进穿过腕组件5500并附接到第一工具构件5462的滑轮部分5467,如图17中大体上详细示出的。以此方式,第一致动器5800可操作地绕第一致动器轴线a
13
旋转,从而推动第一带5420和第二带5430绕轴线a
12
致动第一工具构件5462(类似于来自上面讨论的第一工具构件4462上的第一带4420和第二带4430的运动传递)。例如,第一致动器5800绕轴线a
13
在箭头aa的方向上的旋转推动第一工具构件5462沿箭头kk的方向绕轴线a
12
旋转。
121.第三致动器5840包括轴,第三带5440的第一端部5441和第四带5450的第一端部5451缠绕在该轴上。以这种方式,例如,第三带5440从第三致动器5840的一侧切向延伸并且第四带5450从第三致动器5840的另一侧切向延伸,如图24中更详细地示出的。第三带5440和第四带5450的第一端部经由紧固件机构固定到第三致动器5840,如上面关于第一带5420和第二带5430至第一致动器5800的连接所示出和描述的。第三带5440和第四带5450联接到滑轮部分5477以控制第二工具构件5472。具体地,第三带5440和第四带5450从第三致动器5840穿过第二致动器5820并在外壳5760的引导构件5770之上行进。引导构件5770改变第三带5440和第四带5450的纵向中心线的方向,使得第三带5440的中央部分5443和第四带5450的中央部分5453被导引到轴5410的近端5411处的开口中。具体地,参照图30,第三带5440的纵向中心线cl3和第四带5450的纵向中心线(在图30中未标识以保持清晰,但类似于针对第三带5440所示的)由引导构件5770重定向达大约90度的角度。尽管带的方向(或“弯曲”)的变化量被示为九十度,但在另一些实施例中,引导构件可以将第三带5440和第四带5450的纵向中心线重定向达任何合适的弯曲角度,例如,诸如45度和135度之间的弯曲角度、60度和120度之间的弯曲角度或75度和105度之间的弯曲角度
122.第三带5440和第四带5450基本上平行于轴5410的纵向轴线从近端5411延伸穿过内腔5413至远端5412。第三带5440的第二端部5442和第四带5450的第二端部5452从远端5412行进穿过腕组件5500并附接到第二工具构件5472的滑轮部5477。以这种方式第三致动器5840可操作地围绕第三致动器轴线a
15
旋转,从而推动第三带5440和第四带5450绕轴线a
12
致动第二工具构件5472(类似于来自第二工具构件4472上的第三带4440和第四带4450的运动传递)。例如,第三致动器5840绕轴线a
15
在箭头ee的方向上的旋转推动第二工具构件5472沿箭头kk的方向绕轴线a
12
旋转。可以一起致动第一致动器5800和第三致动器5840,使得第一工具构件5462和第二工具构件5472可以绕轴线a
12
一起旋转以控制偏航,或者彼此相反地旋转以控制第一工具构件5462和第二工具构件5472的夹持。因此,第一致动器5800和第三致动器5840以及两对带5420、5430、5440、5450可以被操作以控制两个自由度(即,夹持和偏航)。
123.参照图19
‑
24和图26
‑
27,第二致动器5820(其用作长度守恒构件)包括第一安装部分5822、第二安装部分5823、引导结构5821和扇形齿轮5824。第一安装部分5822被配置为由底座5710的开口5713中的一个可旋转地支撑。第二安装部分5823被配置为由外壳的开口
5763中的一个可旋转地支撑。第一安装部分5822和第二安装部分5823二者均沿着第二致动器5820的旋转中心轴线a
14
延伸。第二致动器5820可经由驱动设备(未示出)驱动以相对于底座5710和外壳5760绕中心旋转轴线a
14
旋转。具体地,第二致动器5820的扇形齿轮5824与驱动齿轮5714啮合,驱动齿轮5714又可以联接到驱动设备的马达。以此方式,驱动齿轮5714的旋转推动第二致动器5820绕中心旋转轴线a
14
旋转。
124.第二致动器5820的引导结构5821包括第一引导结构轴线a
15
和第二引导结构轴线a
16
,第二引导结构轴线a
16
平行于第一引导结构轴线a
15
并与其横向间隔开一部分。第一引导结构轴线a
15
和第二引导结构轴线a
16
二者均平行于中心旋转轴线a
14
并与其等距间隔开。然而,在另一些实施例中,第一引导结构轴线a
15
可以不平行于第二引导结构轴线a
16
,并且第一引导结构轴线a
15
和第二引导结构轴线a
16
可以与中心旋转轴线a
14
不等距地间隔开。引导结构5821至少包括第一引导表面5825、第二引导表面5826、第三引导表面5827和第四引导表面5828。第一引导表面5825和第二引导表面5826沿着第一引导结构轴线a
15
延伸,而第三引导表面5827和第四引导表面5828沿着第二引导结构轴线a
16
延伸。第一引导表面5825限定第一宽度并且第二引导表面5826限定第二宽度,第一宽度和第二宽度沿着第一引导结构轴线a
15
彼此间隔开。第三引导表面5827限定第三宽度并且第四引导表面5828限定第四宽度,第三宽度和第四宽度沿着第二引导结构轴线a
16
彼此间隔开。
125.第一引导表面5825和第三引导表面5827在它们之间限定了第一带开口5831。类似地陈述的,第一带开口5831被限定在第一引导表面5825和第三引导表面5827之间。在使用中,第一带5420的第一端部5421可以在其穿过第二致动器5820的第一带开口5831时接触第一引导表面5825并沿着第一引导表面5825滑动,并且第三带5440的第一端部5441可以在其穿过第二致动器5820的第一带开口5831时接触第三引导表面5827并沿着第三引导表面5827滑动。第二引导表面5826和第四引导表面5828在它们之间限定了第二带开口5832。类似地陈述的,第二带开口5832被限定在第二引导表面5826和第四引导表面5828之间。在使用中,第二带5430的第一端部5431可以在其穿过第二致动器5820的带开口5832时接触第二引导表面5826并沿着第二引导表面5826滑动,并且第四带5450的第一端部5451可以在其穿过第二致动器5820的第二带开口5832时接触第四引导表面5828并沿着第四引导表面5828滑动。
126.在一些实施例中,第一引导表面5825和第二引导表面5826可以包括由从第一引导结构轴线a
15
延伸的半径限定的圆形或弯曲表面。第三引导表面5827和第四引导表面5828可以包括由从第二引导结构轴线a
16
延伸的半径限定的圆形或弯曲表面。通过提供圆形或弯曲的表面,当带5420、5430、5440、5450穿过带开口或受到引导结构5821和相应的引导表面作用时,可以减少带5420、5430、5440、5450的磨损和摩擦表面,从而提高部件的使用寿命。虽然第一引导表面5825和第二引导表面5826被图示为相对于第一引导结构轴线a
15
的固定表面,并且第三引导表面5827和第四引导表面5828被图示为相对于第二引导结构轴线a
16
的固定表面,但是在一些实施例中,第一引导表面5825、第二引导表面5826、第三引导表面5827和第四引导表面5828中的一个或多个可以相对于第一引导结构轴线a
15
或第二引导结构轴线a
16
旋转。例如,第一、第二、第三或第四引导表面中的一个或多个可形成为可绕第一引导结构轴线a
15
或第二引导结构轴线a
16
旋转的滑轮构件,以进一步减小穿过第二致动器5820的带的摩擦。。
127.如图所示,引导结构5821包括桥接部5829,桥接部5829在第一引导结构轴线a
15
和第二引导结构轴线a
16
之间从第一引导表面5825和第二引导表面5826之间的位置延伸到第三引导表面5827和第四引导表面5828之间的位置。因此,桥接部5829将第一带开口5831和第二带开口5832分离。以此方式,桥接部5829能够在第二致动器5820和带5420、5430、5440、5450的操作期间保持第一引导表面5825、第二引导表面5826、第三引导表面5827和第四引导表面5828的间距并提高它们的刚性和稳定性。在一些实施例中,第一引导表面5825、第二引导表面5826、第三引导表面5827和第四引导表面5828可以与第二致动器5820整体形成。在一些实施例中,桥接部5829也可以与第二致动器5820整体形成。在另一些实施例中,第二致动器5820不需要包括桥接部,并且第一带开口5831可以与第二带开口5832连续。类似地陈述的,在一些实施例中,第二致动器5820限定单个开口,所有带可以穿过该开口移动。
128.参照图19、图21
‑
24和图26
‑
27,第二致动器5820的扇形齿轮5824可被驱动齿轮5714驱动以沿箭头hh的方向绕中心旋转轴线a
14
旋转。因为第二引导结构轴线a
16
偏移中心旋转轴线a
14
,所以第三引导表面5827和第四引导表面5828大体在箭头jj的方向上被致动,例如如图27所示。以这种方式,第三引导表面5827和第四引导表面5828从组件中心线cl
a
的一侧横向移动到另一侧,从而增加第三带5440和第四带5450退出致动器组件5700的行进路径。同时,第一引导表面5825和第二引导表面5826大体在箭头jj的方向上被致动以远离组件中心线cl
a
移动,从而减少第一带5420和第二带5430退出致动器组件5700的行进路径。通过在致动器组件5700内增加第三带5440和第四带5450的行进路径并减少第一带5420和第二带5430的行进路径,第三带5440和第四带5450的长度被有效地从致动器组件5700外面收起,而第一带5420和第二带5430的长度被释放到致动器组件5700外面。以这种方式,第一带5420、第二带5430、第三带5440和第四带5450的运动推动腕组件5500沿箭头ll的方向绕轴线a
11
旋转以实现第三自由度(即,俯仰,术语俯仰是任意的)。如本领域技术人员将理解的,第二致动器5820在与箭头hh相反的方向上的旋转将具有增加第一带5420和第二带5430的行进路径同时减少第三带5440和第四带5450的行进路径的效果,从而推动腕组件5500在与箭头ll相反的方向上绕轴线a
11
旋转。
129.参照图18
‑
20、图23
‑
24和28
‑
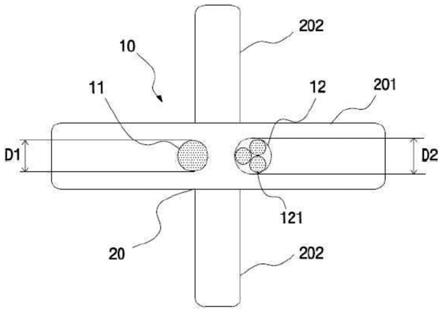
31,外壳5760包括引导构件5770,用于重定向并对齐进入和退出致动器组件5700的带5420、5430、5440、5450。在一些实施例中,为了实现仅使用如上所述的两对带5420、5430、5440、5450进行关于三种自由度的致动,带5420、5430、5440、5450可以布置成在大体垂直于轴5410的纵向轴线的方向上行进。此外,为了使得能够通过第二致动器5820的引导结构5821改变带的行进路径,带5420、5430、5440、5450在行进通过第二致动器5820时可以首先间隔开。然而,由于微创手术的空间约束和所需的减小的器械轴直径,重定向带并以紧凑方式引导带穿过轴5410的内腔5413是有利的。如本文所述,致动器组件5700和引导构件5770有助于重定向带通过弯曲角度,使得每个带的纵向中心线(例如,第一带5420的纵向中心线cl1)可以行进到轴的内腔5413中。致动器组件5700和引导构件5770还被配置为将带定位成在期望位置处进入轴5410。具体地,引导构件5770经配置使得第一带5420的弯曲部分被定位在进入轴5410的内腔5413的开口上面的第一高度h1处,并且第二带5430的弯曲部分被定位在进入轴5410的内腔5413的开口上面的第二高度h2处,其中第二高度h2不同于第一高度h1(参见例如图31)。另外,引导构件5770经配置使得带可以绕轴5410的纵向中心线间隔开。以这种方式,第一带5420、第二带5430、第三带5440和第四带
5450可以行进到轴内腔5413内的期望位置中。具体地,带可以定位在与轴中心线间隔开的轴通道内,并且在轴通道内的不同径向或周向位置处。这种布置可以防止相邻带的摩擦接触并降低带将在轴5410内彼此缠结的可能性。尽管引导构件5770被示为执行这些行进(或重定向)功能中的每一种,但在另一些实施例中,引导构件可以包括结构和/或可以仅执行这些功能的子集。
130.参照图28,引导构件5770包括第一引导元件5771、第二引导元件5772、第三引导元件5773和第四引导元件5774。第一引导元件5771、第二引导元件5772、第三引导元件5773和第四引导元件5774中的每一个的尺寸可设计成至少容纳穿过引导构件5770的相应带的宽度。第一引导元件5771可以包括第一支撑销5781和一个或多个第一轴承5791,用于引导和重定向在致动器组件5700和轴5410之间的第一带5420。第二引导元件5772可以包括第二支撑销5782和一个或多个第二轴承5792,用于引导和重定向第二带5430。第三引导元件5773可以包括第三支撑销5783和一个或多个第三轴承5793,用于引导和重定向第三带5440。第四引导元件5774可以包括第三支撑销5784和一个或多个第四轴承5794,用于引导和重定向第四带5450。所述销中的每一个可以固定地或可旋转地安装到外壳5760。例如,销5781、5782、5783、5784可以经由摩擦配合、可移除的盖构件和/或一个或多个紧固构件固定到外壳。轴承5791、5792、5793、5794中的每一个都可操作以独立旋转。例如,当第一致动器5800送出第一带5420的长度同时收起第二带5430的长度时,在轴承5792沿与第一方向相反的第二方向旋转时,轴承5791可操作以沿第一方向旋转。
131.轴承可以是任何类型的合适的轴承,以供带5420、5430、5440、5450部分地缠绕在其上以在轴承上滑动或随轴承滚动。例如,轴承可以是衬套、滚珠轴承、滚针轴承等中的一种或多种。在一些实施例中,销和轴承布置可以用具有光滑或摩擦减小的表面的以供带5420、5430、5440、5450穿过引导构件5770的固定圆形构件代替。例如,固定圆形构件可以包括用聚四氟乙烯(ptfe)或其他减摩涂层处理的表面。在一些实施例中,引导构件5771、5772、5773、5774中的每一个可以包括两个或更多个轴承5791、5792、5793、5794以提供支撑的均匀分布并促进旋转运动,特别是考虑到所涉及的小尺寸。例如,第一引导构件5771可以具有四个轴承5791并且第二引导构件5772可以具有两个轴承5792,其中第一带5420的宽度大于第二带5430的宽度。
132.如图19、图20、图23、图24和图30所示,带5420、5430、5440、5450中的每一个大体在沿着外壳5760的长度(即,沿着图26和图27所示的组件中心线cl
a
)的方向上从第一致动器5800或第三致动器5840行进到引导构件5770。当带5420、5430、5440、5450穿过第二致动器5820的引导结构5821时,带5420、5430、5440、5450中的每一个的宽度在平行于中心旋转轴线a
14
的竖直方向上定向。在一些实施例中,带5420、5430、5440、5450中的每一个的宽度各自相对于中心旋转轴线a
14
彼此间隔开。类似陈述的,如图30所示,每个带的纵向中心线沿着中心旋转轴线a
14
与其他带的纵向中心线偏移。类似地,引导元件5771、5772、5773、5774中的每一个相对于中心旋转轴线a
14
彼此间隔开。例如,第一引导元件5771与轴5410的近端部分5411相距第一轴向距离(即,沿着轴5410的中心线),并且第二引导元件5772与轴5410的近端部分5411相距不同的第二轴向距离。
133.为了减少带5420、5430、5440、5450在行进穿过轴5410时所占据的空间的量,第一引导元件5771、第二引导元件5772、第三引导元件5773和第四引导元件5774相对于轴的中
心轴线彼此径向偏移。以此方式,第一引导元件5771、第二引导元件5772、第三引导元件5773和第四引导元件5774执行漏斗功能,使带5420、5430、5440、5450在它们进入轴5410时更靠近在一起,同时保持足够的间距以避免干扰。如图19、图30和图31所示,轴承5791、5792、5793、5794中的每一个的中心旋转轴线可以在箭头ss的方向上彼此偏移,该方向垂直于轴5410的中心轴线。例如,第二引导元件5772的轴承5792可以径向定位在离轴5410的中心轴线最远的位置。第四引导元件5774的轴承5794可以放置在第二最远的位置,并且在ss方向上与轴承5793水平间隔第一偏移距离d1。第一引导元件5771的轴承5791可以放置第三最远的位置,并且在方向ss上与轴承5794水平间隔第二偏移距离d2。第三引导元件5773的轴承5792可以沿径向最靠近轴5410的中心轴线放置,并且在ss方向上与轴承5791水平间隔第三偏移距离d3。以这种方式,带5430、5450、5420、5440可以在ss方向上以相应的间距距离s1、s2、s3间隔开。在一些实施例中,可以选择偏移距离d1、d2、d3使得所得间距距离s1、s2、s3是每个对应带(或形成带的带层压件)的厚度的0.5到3倍,该厚度在ss方向上取得。在一些实施例中,轴承5791、5792、5793、5794中的每一个的中心旋转轴线都可以在ss方向上水平对齐,并且轴承5791、5792、5793、5794的直径变化以便实现所得间距距离s1、s2、s3。例如,轴承5792的直径可以大于轴承5791的直径。
134.再次参照图29和图30,第一引导元件5771、第二引导元件5772、第三引导元件5773和第四引导元件5774沿着平行于底座5710的平面水平定向,带5420、5430、5440、5450中的每一个沿着其各自的纵向中心线扭转大约90度,使得带的宽度在它们进入引导构件5770时重新定向为与底座5710平行。以这种方式,每个带的横截面形状处于第一取向以产生绕第一轴线(即,中心旋转轴线a
14
、第一致动器轴线a
13
和第二致动器轴线a
15
)的低面积惯性矩,并且处于第二取向以产生绕第二轴线(即,引导元件的弯曲轴线)的低面积惯性矩。这种布置可以允许单个带变形以保持绕两个或更多个不同轴线的期望柔性(例如,绕中心旋转轴线a
14
和弯曲轴线容易地变形)。
135.如图23所示,第一带5420和第二带5430相对于它们各自的纵向中心线扭转 90度,而第三带5440和第四带5450相对于它们各自的纵向中心线扭转
‑
90度。以这种方式,带5420、5430、5440、5450相对于每一个沿着轴5410的中心轴线堆叠,例如如图30和图31所示。在一些实施例中,第一带5420和第二带5430相对于它们各自的纵向中心线扭转
‑
90度,而第三带5440和第四带5450相对于它们各自的纵向中心线扭转 90度。在一些实施例中,可以为第一带5420、第二带5430、第三带5440和第四带5450分别选择扭转角度和扭转旋转方向,以调整带的相应路径以用于进一步的长度守恒。带5420、5430、5440、5450中的每一个在各自的轴承5791、5792、5793、5794之上和周围引导,以在轴5410的远端5412处的开口之上和上面转动大约90度。换句话说,带5420、5430、5440、5450中的每一个都退出它们各自的轴承5791、5792、5793、5794,与轴5410的内腔5413对齐并且在轴5410的内径内。
136.图32
‑
36是根据实施例的器械5400’的各种视图。类似于如参照图18
‑
20所示的器械5400,器械5400’可以联接到mirs系统(例如参照上述图1
‑
4描述的mirs系统1000)并与其一起操作。器械5400’包括致动器组件5700’(其用作传动或后端机构),致动器组件5700’具有联接到底座5710’的外壳5760’。致动器组件5700’可操作以以与上述类似的方式致动第一带5420、第二带5430、第三带5440、第四带5450和腕组件5500。致动器组件5700’包括第一致动器5800’、第二致动器5820’和第三致动器5840’。第一致动器5800’以与上述第一致动
器5800相同的方式联接到第一带5420和第二带5430并且可操作以致动第一带5420和第二带5430,并且第三致动器5840’以与上述第三致动器5840相同的方式联接到第三带5440和第四带5450并且可操作以致动第三带5440和第四带5450。
137.在一些实施例中,第二致动器5820’可以包括具有一个或多个弯曲表面的以增加或减少第一带5420、第二带5430、第三带5440和第四带5450的行进路径的引导结构5821’。如图32和图33所示,带5420、5430、5440、5450可以在引导结构5821’周围行进。参照图34
‑
36,第二致动器5820’的引导结构5821’可以与中心旋转轴线a
14
对齐并且包括第一凸轮引导表面5825’、第二凸轮引导表面5826’、第三凸轮引导表面5827’以及第四凸轮引导表面5828’。凸轮引导表面5825’、5826’、5827’、5828’中的每一个可操作以在不平行于带5420、5430、5440、5450的中心线的方向上分别压在带5420、5430、5440、5450上。凸轮引导表面5825’、5826’、5827’、5828’中的每一个压在每个相应的带5420、5430、5440、5450上的量可以通过绕中心轴线a
14
旋转第二致动器5820’来改变。由于相应凸轮表面5825’、5826’、5827’、5828’的挤压造成的带5420、5430、5440、5450上的偏转量又增加或减少带5420、5430、5440、5450在致动器组件5700’内的行进路径。
138.如图34和图36所示,凸轮引导表面5825’、5826’、5827’、5828’中的每一个可具有在垂直于并相对于第二致动器5820’的中心旋转轴线a
14
的平面中限定的偏心轮廓。例如,第三凸轮引导表面5827’可具有与中心旋转轴线a
14
间隔可变距离的外轮廓。如图35和图36所示,第三凸轮引导表面5827’的第一部分5827a’可以与中心旋转轴线a
14
间隔第一径向距离r1,第三凸轮引导表面5827’的第二部分5827b’可以间隔第二径向距离r2,并且第三凸轮引导表面5827’的第三部分5827c’可以间隔第三径向距离r3。第三径向距离r3大于第二径向距离r2,并且第二径向距离r2大于第一径向距离r1。举例来说,如果第三带5440首先在第二部分5827b’处接触第三凸轮引导表面5827’,则可以通过沿与箭头hh相反的方向顺时针旋转图36的第二致动器5820’使得第三部分5827c’接近第二致动器5820’和第三带5440之间的接触点而使第三带5440进一步位移(从而增加行进路径)。相反,可以通过沿箭头hh的方向逆时针旋转图36的第二致动器5820’使得第一部分5827a’接近第二致动器5820’和第三带5440之间的接触点而使第三带5440的位移减小(从而减少行进路径)。在一些实施例中,凸轮引导表面5825’、5826’、5827’、5828’中的一个或多个的整体可以偏移于轴线a
14
,使得轴线a
14
不与由引导表面5825’、5826’、5827’、5828’中的一个或多个界定的任何区域相交。
139.一旦带5420、5430、5440、5450绕过第二致动器5820’,带5420、5430、5440、5450就可以以与上面参照图18
‑
20、图23
‑
24和图28
‑
31描述的引导构件5770类似的方式行进穿过外壳5760’的引导构件5770’并穿过轴5410。带5420、5430、5440、5450中的每一个也可以在如上面参照图23、图29和图30描述的各种配置中沿着其各自的纵向中心线在第二致动器5820’和引导构件5770’之间扭转。
140.虽然上面已经描述了各种实施例,但是应当理解,它们仅通过示例而非限制的方式呈现。在上述方法和/或示意图指示以某种顺序发生的某些事件和/或流程模式的情况下,可以修改某些事件和/或操作的排序。虽然已经具体地示出和描述了实施例,但是应当理解,可以在形式和细节上做出各种改变。
141.例如,本文所述的任何器械(和其中的部件)任选地是进行微创外科手术的外科手术组件的部分,并且其可以包括操纵器单元、一系列运动学联动装置、一系列插管或诸如此
类。因此,本文所述的任何器械都可用于任何合适的外科手术系统,例如上文示出和描述的mirs系统1000。此外,本文示出和描述的任何器械都可用于在外科手术过程中操纵目标组织。这种目标组织可以是癌细胞、肿瘤细胞、病变、血管闭塞、血栓形成、结石、子宫肌瘤、骨转移瘤、子宫腺肌病或任何其他身体组织。所呈现的目标组织示例并非详尽列表。此外,目标结构还可以包括身体内或与身体相关联的人造物质(或非组织),举例来说,例如支架、人造管的一部分、身体内的紧固件或诸如此类。
142.例如,任何工具构件都可以由任何材料构成,这些材料诸如医用级不锈钢、镍合金、钛合金或诸如此类。此外,本文所述的任何连杆、工具构件、张力构件或部件可以由稍后连结在一起的数块构成。例如,在一些实施例中,可以通过将单独构造的部件连结在一起来构造连杆。然而,在另一些实施例中,本文描述的任何连杆、工具构件、张力构件或部件可以整体构造。
143.尽管器械通常被示为具有正交于第一旋转轴线a1的第二旋转轴线a2,但在另一些实施例中,本文所述的任何器械可以包括与第一旋转轴线a1偏移任何合适角度的第二旋转轴线a2。
144.尽管第一带5420被描述为与第二带5430分开,但在一些实施例中,第一带5420和第二带5430可以整体构造,使得它们各自的远端部分是缠绕在第一工具构件5462的滑轮部分5467上的单个主体。
145.本文所述的任何带可以具有任何合适的形状。例如,在一些实施例中,本文所述的带可具有矩形横截面形状(在正交于带的纵向中心线的横截面平面内截取)。在另一些实施例中,本文所述的任何带可具有梯形形状或任何其他合适的横截面形状。此外,本文所述的任何带可以由任何合适的材料构成。例如,在一些实施例中,本文所述的任何带可由一系列粘接在一起(例如,经由粘合剂)的层压件构成。在另一些实施例中,层压件可以通过任何其他合适的方法连结。层压件可由任何合适的材料构成,这些材料包括钨、钢或任何合适的聚合物。由于带的宽度提供比同类缆线或线材更大的接触面积,并且因此提供更好的负载分布,所以带接触的表面可以是固定表面,具有减少摩擦的表面涂层的固定表面、可旋转表面(例如,滑轮或轴承)或具有减少摩擦的表面涂层的可旋转。另外,任何带可以用其他类型的张力构件代替或可与其他类型的张力构件一起使用,所述其他类型的张力构件包括但不限于缆线、线材、梁、杆,或带、缆线、线材、梁或杆中的一种或多种的组合。
146.尽管各种实施例已被描述为具有特定特征和/或部件的组合,但具有来自上述任何实施例的任何特征和/或部件的组合的其他实施例也是可能的。已经在医疗设备(更具体地说是外科手术器械)的一般上下文中描述了各方面,但发明方面不一定限于在医疗设备中的使用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。