1.本发明属于散斑自相关成像技术领域,具体涉及一种透过散射介质的进行光学成像和定位的装置和方法。
背景技术:
2.物体发出的光经过浴帘、毛玻璃、生物组织等介质时,由于其内部的非均匀性,光线多次散射,波前完全随机化。介质后得到的是随机散斑,传统成像中的点对点的关系被破环,直接后果是无法对物体成像,更无法定位。为了解决透过散射介质成像的问题,研究人员提出了光学相位共轭、迭代波前整形、散射矩阵测量、散斑自相关以及散斑反卷积成像等技术,充分利用散射光进行成像。其中,光学相位共轭、迭代波前整形、散射矩阵测量、散斑反卷积成像都需要先引入参考点或参考物进行预测量,无法实现实时无损成像。在没有辅助信息的情况下,所有这些方法都只能识别物体的形状,无法确定其位置和实际大小。
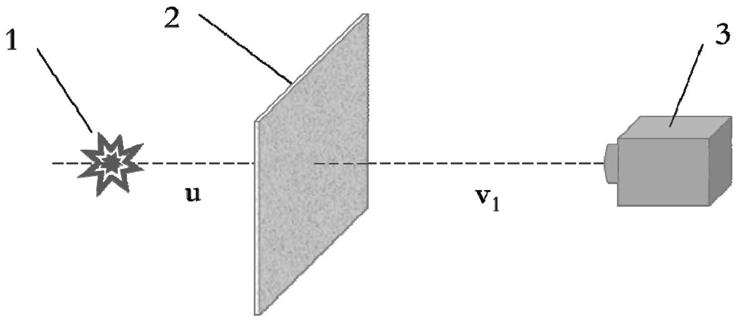
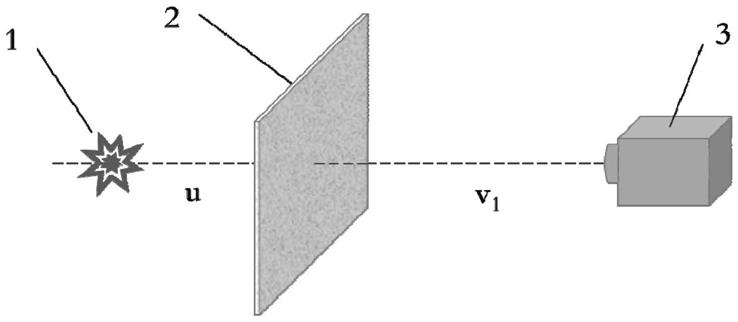
3.散斑自相关成像技术是近年研究的热点,相比于其他透过散射介质成像技术,其优势在于结构简单,无侵入,并且单曝光就能成像。该技术的基本装置和原理如图1所示,物体发出的光经过散射介质2后,在ccd探测面上形成散斑,为了满足系综平均的要求,装置安排上往往要求散斑场分布大于ccd的感光面,从而探测到一个均匀的散斑包络分布。散斑图的自相关等于物体的自相关,利用g-s算法、hio算法等图像提取算法从散斑图中提出物体的图像。
技术实现要素:
4.为克服现有技术不足,本发明提出一种过散射介质的进行光学成像和定位的装置和方法,将散射介质可以看作是无数随机排布小孔相机的组合,对应的散斑则是大量中心偏移的小孔像的叠加。小孔成像中物体和像之间满足几何投影关系。随机小孔相机理论证明物体、散射介质和散斑之间也存在着投影关系,这为散射介质后的物体定位提供了依据。而一旦物体的位置确定后,就可以计算物像间的缩放关系。利用散斑自相关成像可以快速识别物体的模式,结合缩放关系确定物体的绝对大小。
5.本发明的技术解决方案如下:
6.一种透过散射介质的无侵入光学成像和定位的装置,包括散射介质层,光阑和ccd相机,其特点在于,所述的光阑位于所述的散射介质层与ccd相机之间,且紧贴所述的散射介质层,所述的ccd相机可用于识别射散斑图强度分布的完整包络和每个散斑颗粒的大小,待测物体、散射介质层,光阑和ccd相机同光轴。
7.物体发出的光经过散射介质后被ccd相机探测,相机的像素大小要满足采样率要求,且相机感光面足够大以观察到能量分布的包络。
8.所述的散射介质层与ccd相机之间还放置有光谱滤波和/或偏振滤波。
9.光阑可以是真实光阑,也可以是虚拟光阑,例如当照射在散射介质上的光斑大小有限时,光斑大小就决定了光阑直径。
10.一种透过散射介质的无侵入光学成像和定位的方法,其特点在于,包括如下步骤:
11.步骤1.通过ccd相机获取散斑图,要求相机面积足够大以获取散斑强度分布的完整包络,同时像素足够小以识别散斑颗粒;
12.步骤2.利用质心定位算法计算整幅散斑图质心的位置,物体的质心在散斑质心和光阑中心连线的反向延长线上;
13.步骤3.对整幅散斑的光强进行切向平均提取光强包络,再用符合函数,如中间是阶梯函数边缘是gaussian函数,对光强包络进行拟合,提取阶梯函数的宽度和gaussian函数的半高宽之和为投影直径,测量光阑的直径和像距v,利用几何相似关系计算物距u,从而确定物体在散射介质层后三维空间的位置;即可知道放大率m=v/u和物体质心的3d位置
14.步骤4.截取散斑图中间的投影部分,利用散斑自相关成像方法提取物体的像,如g-s或hio算法,并结合像素大小和放大率m确定物体的实际大小,实现了散射介质后物体的成像、三维定位和大小度。
15.与现有技术相比,本发明的技术效果是:无需任何散射介质后的辅助手段或信息,完全无侵入,并且单曝光即可提取所有信息,能够进行实时无损的光学成像。为了提高成像定位的精度,可以改变像距和/或光阑大小,多次测量,进行拟合定位。上述方法并不局限于散射介质和透射模式,粗糙表面的反射模式也可以应用。该方法在生物组织光学成像、荧光成像、反恐监测,水下扫描等方面有着广泛的潜在应用。
附图说明
16.图1是传统散斑自相关成像的结构示意图
17.图2是本发明透过散射介质的无侵入光学成像和定位的结构示意图
18.图中:1-目标物体,2-散射介质层,3-ccd相机,4-光阑,u-目标物体到散射介质层的距离,v
1-散射介质层后表面到相机的距离,v
2-光阑到相机的距离。
具体实施方式
19.下面对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
20.请参阅图2,图2是本发明透过散射介质的无侵入光学成像和定位的结构示意图,如图所示,一种透过散射介质的无侵入光学成像和定位的装置,包括散射介质层2,光阑4和ccd相机3,所述的光阑4位于所述的散射介质层2与ccd相机3之间,且紧贴所述的散射介质层2,所述的ccd相机3可用于识别射散斑图强度分布的完整包络和每个散斑颗粒的大小,待测物体、散射介质层2,光阑4和ccd相机3同光轴。
21.在物距固定的情况下,需要调节合适的像距和光阑直径。
22.一种透过散射介质的无侵入光学成像和定位的方法,包括如下步骤:
23.步骤1.通过ccd相机获取散斑图,要求相机面积足够大以获取散斑强度分布的完整包络,同时像素足够小以识别散斑颗粒;
24.步骤2.利用质心定位算法计算整幅散斑图质心的位置,物体的质心在散斑质心和
光阑中心连线的反向延长线上;
25.步骤3.对整幅散斑的光强进行切向平均提取光强包络,再用符合函数,如中间是阶梯函数边缘是gaussian函数,对光强包络进行拟合,提取阶梯函数的宽度和gaussian函数的半高宽之和为投影直径,测量光阑的直径和像距v,利用几何相似关系计算物距u,从而确定物体在散射介质层后三维空间的位置;
26.步骤4.截取散斑图中间的投影部分,利用g-s或hio算法提取物体的像,并结合像素大小和放大率确定物体的实际大小。
技术特征:
1.一种透过散射介质的无侵入光学成像和定位的装置,包括散射介质层(2),光阑(4)和ccd相机(3),其特征在于,所述的光阑(4)位于所述的散射介质层(2)与ccd相机(3)之间,且紧贴所述的散射介质层(2),所述的ccd相机(3)可用于识别射散斑图强度分布的完整包络和每个散斑颗粒的大小,待测物体、散射介质层(2),光阑(4)和ccd相机(3)同光轴。2.根据权利要求1所述的透过散射介质的无侵入光学成像和定位的装置,其特征在于,在物距固定的情况下,需要调节合适的像距和光阑直径。3.根据权利要求1或2所述的透过散射介质的无侵入光学成像和定位的装置,其特征在于,所述的散射介质层(2)与ccd相机(3)之间还放置有光谱滤波和/或偏振滤波。4.一种透过散射介质的无侵入光学成像和定位的方法,其特征在于,包括如下步骤:步骤1.通过ccd相机获取散斑图,要求相机面积足够大以获取散斑强度分布的完整包络,同时像素足够小以识别散斑颗粒;步骤2.利用质心定位算法计算整幅散斑图质心的位置,物体的质心在散斑质心和光阑中心连线的反向延长线上;步骤3.对整幅散斑的光强进行切向平均提取光强包络,再用符合函数,如中间是阶梯函数边缘是gaussian函数,对光强包络进行拟合,提取阶梯函数的宽度和gaussian函数的半高宽之和为投影直径,测量光阑的直径和像距v,利用几何相似关系计算物距u,从而确定物体在散射介质层后三维空间的位置;步骤4.截取散斑图中间的投影部分,利用g-s或hio算法提取物体的像,并结合像素大小和放大率确定物体的实际大小。
技术总结
一种透过散射介质的无侵入光学成像和定位的装置,包括散射介质层,光阑和CCD相机,所述的光阑位于所述的散射介质层与CCD相机之间,且紧贴所述的散射介质层,所述的CCD相机可用于识别射散斑图强度分布的完整包络和每个散斑颗粒的大小,待测物体、散射介质层,光阑和CCD相机同光轴;以及无侵入光学成像和定位的方法。本发明无需任何散射介质后的辅助手段或信息,完全无侵入,并且单曝光即可提取所有信息,能够进行实时无损的光学成像。在生物组织光学成像、荧光成像、反恐监测,水下扫描等方面有着广泛的潜在应用。有着广泛的潜在应用。有着广泛的潜在应用。
技术研发人员:刘红林
受保护的技术使用者:中国科学院上海光学精密机械研究所
技术研发日:2020.06.11
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。