1.本实用新型属于门锁测试技术领域,具体涉及一种电子锁具耐久性能测试设备。
背景技术:
2.电子锁具是在传统机械锁的基础上进行改进的,电子锁具区别于传统机械锁是具有安全性、便利性、先进技术的复合型锁具。
3.现有的电子锁具耐久性能测试设备以传统机械运动机构和plc控制系统对简单的电子锁具可以进行包括密码、门卡和指纹输入开启门锁的开锁方式进行耐久性能测试,其适应性不强,对于较复杂的电子锁就难以实现耐久性能测试,采用气缸控制点击密码时,对于电子锁具的按键可呈倾斜平面、弧面或曲面分布,每次按键时气缸行程不同而难以实现测试;采用动态密码的锁具,锁具屏幕的密码键的位置每一次输入时都不相同,每次输入密码的位置坐标都不相同,因此传统的测试设备无法自动完成耐久性能测试。
技术实现要素:
4.本实用新型的目的是,为了解决现有技术存在的问题,本实用新型提供一种电子锁具耐久性能测试设备。
5.本实用新型提供了如下的技术方案:
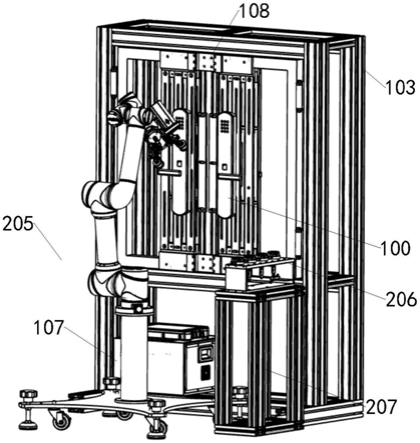
6.一种电子锁具耐久性能测试设备,包括安装框架和测试机构,安装框架上安装有模拟门扇,电子锁具安装在模拟门扇上,测试机构位于安装框架一端,模拟门扇底端安装有支撑框架,控制柜安装在支撑框架上,所述测试机构包括底座、多轴协作机器人、按密码组件和机器人仿真抓夹,所述多轴协作机器人一端安装在底座上,多轴协作机器人另一端安装有工业机器视觉模块和机器人仿真抓夹,所述安装框架前端还安装有放置座,且所述放置座位于底座一侧,所述放置座上安装有快换仿真抓夹。
7.进一步地,所述模拟门扇为左开和右开两开门,所述模拟门扇的左开门和右开门分别为内开式和外开式。
8.进一步地,所述模拟门扇上活动安装有可调节安装支架,电子锁具安装在可调节安装支架上。
9.进一步地,所述电子锁具还包括动态密码输入和虚位密码输入两种模式,且电子锁具上的按键可呈倾斜平面、弧面或曲面分布。
10.进一步地,所述多轴协作机器人内的控制端与控制柜电连接,所述工业机器视觉模块与控制柜电连接。
11.进一步地,所述安装框架上还安装有内开挡块和外开挡块。
12.进一步地,所述机器人仿真抓夹还配有门卡夹块、指纹夹块。
13.本实用新型的有益效果是:
14.1.采用机器视觉技术和工业机器人技术及其自动化控制系统对电子锁具的耐用性能进行测试,增强测试装置的适应能力,可以适应复杂结构形状和多种开锁模式下的耐
久性能测试。
15.2.按键可呈倾斜平面、弧形或曲面分布,密码输入模式可以为固定密码、虚位密码和变位密码。
16.3.测试设备不仅可以采用密码、指纹和门卡交替进行开锁的测试模式,也能使用传统的测试模式和方法。
17.4.电子锁具可调节安装支架活动安装在模拟门扇上,可以调节可调节安装支架的位置,以适应不同尺寸和结构的电子锁具安装。
18.5.设备先通过示教和根据测试步骤完成编程,完成调试后按程序自动运行,操作简便。
附图说明
19.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
20.图1是本实用新型的轴测图;
21.图2是本实用新型的测试机构轴测图;
22.图3是本实用新型的安装框架轴测图一;
23.图4是本实用新型的安装框架轴测图二;
24.图5是本实用新型的放置座轴测图。
25.图中标记为:100、电子锁具;101、模拟门扇;102、锁具把手;103、安装框架;104、滑盖;105、可调节安装支架;106、支撑框架;107、控制柜;108、内开挡块;109、外开挡块;
26.200、底座;201、机器人仿真抓夹;202、多轴协作机器人;203、按密码组件;204、工业机器视觉模块;205、测试机构;206、快换仿真抓夹;207、放置座。
具体实施方式
27.如图1
‑
图5所示,一种电子锁具耐久性能测试设备,包括安装框架103和测试机构205,安装框架103上安装有模拟门扇101,安装框架103上还安装有内开挡块108和外开挡块109,电子锁具100安装在模拟门扇101上,模拟门扇101为左开和右开两开门,模拟门扇101的左开门和右开门分别为内开式和外开式,或模拟门扇101每个门扇均可内开或外开双向开门,对模拟门扇101起限位作用,模拟门扇101底端安装有支撑框架106,控制柜107安装在支撑框架106上,模拟门扇101上活动安装有可调节安装支架105,电子锁具100安装在可调节安装支架105上,电子锁具100还包括动态密码输入和虚位密码输入两种模式,电子锁具100上的按键可呈倾斜平面、弧面或曲面分布,安装框架103前端还安装有放置座207,且所述放置座207位于底座200一侧,所述放置座207上安装有快换仿真抓夹206。
28.输入密码模式本实用新型提供了3种,具体如下:
29.固定密码模式:输入设置的密码按确认键,输入密码正确则电机锁具开启,否则重新输入正确密码;
30.或虚位密码模式:首先输入前置假密码、再输入真密码,再次输入前置假密码,输入密码正确则电机锁具开启,否则重新输入正确密码;
31.或动态密码模式:输入设置的密码按确认键,输入密码正确则电机锁具开启,否则
重新输入正确密码。
32.可调节安装支架105在模拟门扇101上的位置可以调节,便于在可调节安装支架105上安装不同尺寸的电子锁具,扩大了安装框架103的适用范围,测试设备可用于密码开门、磁卡开门、指纹开门的电子锁具的耐久性能的测试,还添加了虚位密码和动态密码输入测试,适用于较复杂的电子锁具。
33.测试机构205位于安装框架103一端,测试机构205包括底座200、多轴协作机器人202和机器人仿真抓夹201,多轴协作机器人202另一端安装有工业机器视觉模块204、按密码组件203和机器人仿真抓夹201,工业机器视觉模块204监控机器人仿真抓夹201与电机锁具100操作面板的接触情况,工业机器视觉模块204与控制柜107电连接,控制柜107根据工业机器视觉模块204监控画面控制和修正多轴协作机器人202,从而调整机器人仿真抓夹201的坐标,机器人仿真抓夹201还配有门卡夹块、指纹夹块。
34.移动滑盖104,打开密码键盘;机器人仿真抓夹201触碰或按压密码键盘,激活面板;输入密码:若密码正确,机器人仿真抓夹201便抓住锁具把手102按电子锁具开门所需的有效操作动作将模拟门扇101打开,若密码错误,则重新进行正确操作;
35.或机器人仿真抓夹201夹持门卡向读卡器输入门卡,门卡正确,则机器人仿真抓夹201便抓住锁具把手102按电子锁具开门所需的有效操作动作模拟门扇101打开,若门卡错误,则机器人仿真抓夹201将门卡远离模拟门扇101后再重新进行正确操作;
36.和/或机器人仿真抓夹201夹持带有指纹的指纹夹块向指纹读头输入指纹,若指纹正确,机器人仿真抓夹201便抓住锁具把手102按电子锁具开门所需的有效操作动作模拟门扇101打开,若指纹错误,则重新输入,根据操作需要操控锁具把手102开门、关门;锁门需要的正确操作进行锁门操作;重复上述步骤至下一循环进行测试。
37.工业机器视觉模块204对被测电子锁具100的按键、读卡器、指纹读头、门锁具把手的位置坐标进行识别和确认,且利用ocr识别和视觉软件对电子锁具拍照进行识别和处理,控制柜107根据监控的画面,调节机器人仿真抓夹201的位置,便于自动化测试电子锁具的耐久性能。
38.多轴协作机器人202内的控制端与控制柜107电连接,工业机器视觉模块204与控制柜107电连接,控制柜107内有多组不同的控制指令控制多轴协作机器人202和机器人仿真抓夹201,多轴协作机器人202具有多个自由度,便于精准控制机器人仿真抓夹201的位置,安装在多轴协作机器人202上的机器人仿真抓夹201输入电子锁具100的按键和密码、向读卡器输入门卡、向指纹读头输入仿真指纹时先利用示教器进行示教并辅助工业机器视觉模块204进行位置修正,多轴协作机器人202前端有弹性元件用于补偿位置误差,确保有效的输入,示教完成后,开启测试程序,测试设备将按测试程序自动对被测试电子锁具100进行耐用性能测试。
39.本实用新型在使用时的工作原理为:密码输入测试:多轴协作机器人202工作,机器人仿真抓夹201将滑盖104打开,工业机器视觉模块204利用ocr识别和视觉软件对电子锁具100操作面板拍照进行识别和处理,机器人仿真抓夹201根据电子锁具100的开门密码触碰键盘面板激活电子锁具进行密码输入,密码输入完成,密码正确,则机器人仿真抓夹201按电子锁具开门所需的有效操作控制锁具把手102,锁舌打开,打开模拟门扇101,关门后按下锁具的锁门键锁门,重复上述步骤至下一循环;
40.门卡输入测试:多轴协作机器人202工作,机器人仿真抓夹201将滑盖104打开,工业机器视觉模块204利用ocr识别和视觉软件对电子锁具100操作面板拍照进行识别和处理,机器人仿真抓夹201抓取门卡,向电子锁具100上的读卡器输入门卡,输入正确,则机器人仿真抓夹201按电子锁具开门所需的有效操作控制锁具把手102,锁舌打开,打开模拟门扇101,关门后按下锁具的锁门键锁门,重复上述步骤至下一循环;
41.指纹输入测试:多轴协作机器人202工作,机器人仿真抓夹201将滑盖104打开,工业机器视觉模块204利用ocr识别和视觉软件对电子锁具100操作面板拍照进行识别和处理,机器人仿真抓夹201抓取带有仿真指纹的指纹夹块,向指纹读头输入仿真指纹,指纹正确,则机器人仿真抓夹20按电子锁具开门所需的有效操作控制锁具把手102,锁舌打开,打开模拟门扇101,关门后按下锁具的锁门键锁门,重复上述步骤至下一循环。
42.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。