1.本技术涉及机器人领域,具体涉及一种用于图书馆的自动抓取图书的机械臂。
背景技术:
2.图书馆作为搜集、整理、收藏图书资料以供人阅览参考的机构,里面收纳了大量的图书,读者在图书馆内阅览图书时,需要先在咨询台查找想要借阅的书所在的书架位置,再前往相应的位置取书。对于不熟悉馆内环境的人,需要耗费一定的时间找书,影响读者的阅读体验。对于残障人士等特殊人群,在取书时有众多不方便,往往需要图书馆的工作人员提供帮助,也增加了馆内工作人员的负担。
技术实现要素:
3.本实用新型的目的在于,提供一种用于图书馆的自动抓取图书的机械臂,具有自动导航和自动取书的功能,帮助读者准确找到想要借阅的书籍的所在位置,并帮助残障人士等特殊人群获取在高层书架的书籍。
4.本实用新型采取的技术方案是:一种用于图书馆的自动抓取图书的机械臂,包括控制盒、触摸屏、抓取装置和供电单元;所述抓取装置、触摸屏和供电单元均设置在所述控制盒上;所述抓取装置和触摸屏均与所述控制盒电路连接;所述供电单元与所述抓取装置、控制盒和触摸屏电路连接;
5.所述控制盒上设置有带ros系统的上位机、带微控制单元的下位机,激光雷达、深度摄像头、激光测距传感器、imu模块、wifi无线模块、第一支架和移动电源充电插口;所述带ros系统的上位机和所述带微控制单元的下位机通过串行接口进行连接和数据通信,所述带ros系统的上位机还和所述触摸屏连接;所述激光雷达和深度摄像头与所述带ros系统的上位机连接;所述激光测距传感器、imu模块、wifi无线模块和抓取装置均与所述带微控制单元的下位机电路连接;所述深度摄像头设置在所述控制盒的前挡板上,所述激光测距传感器设置在所述控制盒的左右两侧挡板上,所述激光雷达和第一支架设置在所述控制盒顶部,所述移动电源充电插口设置在所述控制盒的后挡板上;
6.所述抓取装置包括openmv摄像头和机械臂,所述机械臂包括第一底座、第一舵机、第二舵机、第三舵机、第四舵机、第五舵机、第一机械臂、第二机械臂、第三机械臂、机械爪、连杆、第二支架、舵盘和轴承;所述openmv摄像头设置在所述第一底座上;所述第一底座上设置有第一舵机;所述第一机械臂与第一底座连接;所述第二机械臂与第一机械臂通过第二舵机、第三舵机、舵盘和轴承进行连接;所述第三机械臂和第二机械臂通过舵盘、轴承和连杆连接;所述第四舵机通过第二支架与第三机械臂固定连接;所述第二支架与所述机械爪连接,所述机械爪与第五舵机连接。
7.进一步地,所述带ros系统的上位机包括地图创建模块、目标定位模块、全局路径规划模块、本地路径规划模块和人机交互模块;所述地图创建模块与所述激光雷达和深度摄像头数据连接,并根据所述激光雷达和深度摄像头的反馈数据创建全局电子地图和局部
电子地图;所述目标定位模块和全局路径规划模块均与所述地图创建模块数据连接;所述本地路径规划模块与所述imu模块连接,并根据imu模块所反馈数据确定机械臂所在地图的位置和里程信息,实时规划最佳行驶路线;所述人机交互模块与所述触摸屏连接,用于实现人机交互。
8.进一步地,所述第一机械臂在水平范围内旋转,旋转角度为0~270
°
;所述第二机械臂在竖直范围内旋转,旋转角度为0~180
°
;所述第三机械臂在竖直范围内旋转,旋转角度为0~270
°
;机械爪在竖直范围内旋转,旋转角度为0~270
°
,张合距离为0~11cm。
9.进一步地,所述供电单元包括锂电池和稳压模块,所述锂电池与所述稳压模块电路连接。
10.进一步地,还包括升降平台,所述升降平台设置在所述控制盒上,并与所述控制盒和供电单元电路连接;所述抓取装置设置在升降平台上。
11.进一步地,所述升降平台包括第二底座、承重台、升降臂、平轴、堵板、调节轴、调节电机和连接轴;所述第二底座和承重台之间设置有偶数对升降臂,同一水平面对应的两对升降臂通过所述平轴连接,所述升降臂包括第一升降架和所述第二升降架,所述第一升降架和所述第二升降架交叉旋转连接为一对升降臂;同侧相邻两升降臂的第一升降架和所述第二升降架通过所述连接轴连接;同一水平面对应的两对升降臂的第一升降架和所述第二升降架通过所述堵板进行固定连接;所述调节电机与所述调节轴连接,所述调节轴与所述连接轴连接;所述调节电机与带微控制单元的下位机电路连接。
12.进一步地,所述升降臂的对数为2对、4对或6对。
13.本实用新型的有益效果在于:
14.(1)读者可通过出触摸屏上的界面选择想要的图书,本实用新型可自动定位读者想要阅读的图书的所在书架位置并为读者进行自动导航,带领读者前往目标书架;
15.(2)同时使用视觉slam和激光slam的融合建图提高地图融合效率,提升电子地图的构建精度、观测区域、鲁棒性和容错性;采用卡尔曼滤波算法处理imu模块采集的惯性数据得到机械臂的位姿信息,提高了机械臂位姿估算的准确度;分别采用a*算法和dwa算法实现全局路径规划和本地路径规划,并用蒙特卡罗定位算法进行位置校正,使得机械臂的定位更加准确,从而实现精准导航;
16.(3)可有效协助残障人士等特殊人群获取在高层书架的书籍,降低图书馆工作人员的负担;通过升降平台可实现对书架上不同高度书架层上目标的抓取作业,同时使用openmv摄像头进行坐标定位,使抓取作业准确度更高,速度更快。
附图说明
17.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
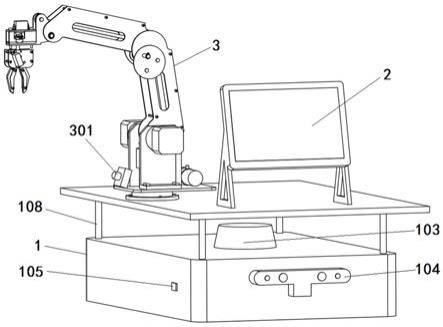
18.图1为本实用新型实施例1的结构示意图。
19.图2为本实用新型实施例1控制盒的结构示意图。
20.图3为本实用新型实施例1抓取装置的结构示意图。
21.图4为本实用新型实施例1的控制原理图。
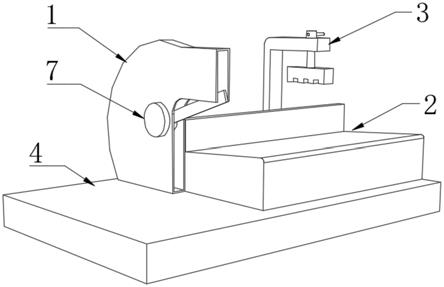
22.图5为本实用新型实施例2的结构示意图。
23.图6为本实用新型实施例2升降平台的结构示意图。
24.图7为本实用新型实施例2控制原理图。
25.附图标记解释: 1. 控制盒、2. 触摸屏、3. 抓取装置、4. 供电单元、5、升降平台、101. 带ros系统的上位机、102. 带微控制单元的下位机、103. 激光雷达、104. 深度摄像头、105. 激光测距传感器、106. imu模块、107. wifi无线模块、108. 第一支架、109. 移动电源充电插口、301. openmv摄像头、302. 第一底座、303. 第一舵机、304. 第二舵机、305. 第三舵机、306. 第四舵机、307. 第五舵机、308. 第一机械臂、309. 第二机械臂、310. 第三机械臂、311. 机械爪、312. 连杆、313. 第二支架、314. 舵盘、315. 轴承、501. 第二底座、502. 承重台、503. 升降臂、504. 平轴、505. 堵板、506. 调节轴、507. 调节电机、508. 第一升降架、509. 第二升降架、510. 连接轴。
具体实施方式
26.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和具体实施方式对本实用新型进行进一步的详细描述。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用其他不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开的具体实施例的限制。
27.除非另作定义,此处使用的技术术语或者科学术语应当为本技术所述领域内具有一般技能的人士所理解的通常意义。本专利申请说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,
ꢀ“
一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。
ꢀ“
连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。
ꢀ“
上”、
ꢀ“
下”、
ꢀ“
左”、
ꢀ“
右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也相应地改变。
28.实施例1:
29.如图1~图4所示,一种用于图书馆的自动抓取图书的机械臂,包括控制盒1、触摸屏2、抓取装置3和供电单元4;所述抓取装置3、触摸屏2和供电单元4均设置在所述控制盒1上;所述抓取装置3和触摸屏2均与所述控制盒1电路连接;所述供电单元4与所述抓取装置3、控制盒1和触摸屏2电路连接;
30.所述控制盒1上设置有带ros系统的上位机101、带微控制单元的下位机102,激光雷达103、深度摄像头104、激光测距传感器105、imu模块106、wifi无线模块107、第一支架108和移动电源充电插口109;所述带ros系统的上位机101和所述带微控制单元的下位机102通过串行接口进行连接和数据通信,所述带ros系统的上位机101还和所述触摸屏2连接;所述激光雷达103和深度摄像头104与所述带ros系统的上位机101连接;所述激光测距传感器105、imu模块106、wifi无线模块107和抓取装置3均与所述带微控制单元的下位机102电路连接;所述深度摄像头104设置在所述控制盒1的前挡板上,所述激光测距传感器105设置在所述控制盒1的左右两侧挡板上,所述激光雷达103和第一支架108设置在所述控制盒1顶部,所述移动电源充电插口109设置在所述控制盒1的后挡板上;
31.所述抓取装置3包括openmv摄像头301和机械臂,所述机械臂包括第一底座302、第一舵机303、第二舵机304、第三舵机305、第四舵机306、第五舵机307、第一机械臂308、第二机械臂309、第三机械臂310、机械爪311、连杆312、第二支架313、舵盘314和轴承315;所述openmv摄像头301设置在所述第一底座302上;所述第一底座302上设置有第一舵机303;所述第一机械臂308与第一底座302连接;所述第二机械臂309与第一机械臂308通过第二舵机304、第三舵机305、舵盘314和轴承315进行连接;所述第三机械臂310和第二机械臂309通过舵盘314、轴承315和连杆312连接;所述第四舵机306通过第二支架313与第三机械臂310固定连接;所述第二支架313与所述机械爪311连接,所述机械爪311与第五舵机307连接。
32.本实用新型实施例1可在使用过程中建立全局电子地图和局部电子地图,自动定位图书的位置信息并进行路径规划,躲避静态或动态障碍物,通过触摸屏2与用户进行人机交互,实现帮助读者拿取图书。 所述控制盒1用于实现本实用新型实施例1的路径规划和自动导航行驶功能,带ros系统的上位机101可实现地图创建、目标定位、线路规划、障碍识别和人机交互,带微控制单元的下位机102用于接收带ros系统的上位机101的指令,获取本实用新型实施例1的位姿信息,控制抓取装置3;触摸屏2用于实现人机交互,读者通过所述触摸屏2浏览并挑选要阅读的图书,本实用新型实施例1对读者挑选的读书进行定位和自动导航,并将导航线路显示在触摸屏2上;抓取装置3可实现对书架上图书的抓取作业;供电单元4用于为本实用新型实施例1提供电能。
33.激光雷达103可将采集的激光信息发送给带ros系统的上位机101,深度摄像头104可将采集的三维点云数据发送给带ros系统的上位机101,带ros系统的上位机101可根据激光信息和三维点云数据剪辑地图;激光测距传感器105与所述带微控制单元的下位机102电路连接,用于在定位抓取装置3工作时,将本实用新型实施例1和目标书架的调整到平行关系和合适的距离;wifi无线模块107用于与带微控制单元的下位机102和远程云端服务器通讯,获取云端内的图书信息;所述供电单元4包括锂电池和稳压模块,所述锂电池与所述稳压模块电路连接,锂电池经稳压电路模块稳压后为本实用新型实施例1各部件提供电能,提高的供电稳定性;所述控制盒1的后挡板上设置有移动电源充电插口109,可使用外部电源对供电单元4进行充电。
34.所述openmv摄像头301上仰30
°
,并固定在所述第一底座302上,用于识别要抓取的目标,并获取它的三维坐标位置发送给机械臂,由机械臂对目标进行抓取和放置。所述第一舵机303用于控制第一机械臂308在水平方向的旋转角度,所述第一机械臂308的旋转范围为0~270
°
;所述第二舵机304和第三舵机305用于控制第二机械臂309在竖直方向的旋转角度,所述第二机械臂309的旋转范围为0~180
°
;所述舵盘314用于控制第三机械臂310在竖直方向的旋转角度,所述第三机械臂310的旋转范围为0~270
°
;所述第四舵机306用于控制机械爪311在竖直方向的转动角度,所述机械爪311的旋转范围为0~270
°
;所述第五舵机307用于控制机械爪311的张合距离,机械爪311张合距离为0~11cm,可实现多角度的转动,提高机械臂的灵活性,机械爪的张合距离可匹配各种厚度的书本,满足用户的使用需求。
35.在本实用新型实施例1中,所述带ros系统的上位机101使用的是raspberry 4 pi model b处理器,搭载有linux系统和ros系统。所述带微控制单元的下位机102则使用stm32f429单片机作为主要处理器。所述带ros系统的上位机101包括地图创建模块、目标定位模块、全局路径规划模块、本地路径规划模块和人机交互模块;所述地图创建模块与所述
激光雷达103和深度摄像头104数据连接,并根据所述激光雷达103和深度摄像头104的反馈数据,使用slam算法创建全局电子地图和局部电子地图,所述地图创建模块同时使用激光slam和视觉slam融合建图,利用ros中开源功能包,先通过视觉slam算法把深度摄像头104获取周围的点云三维数据转换成2d激光数据,再通过基于gmapping的2d激光slam算法把激光雷达103采集的数据转换成栅格地图,采用贝叶斯法则进行地图融合,得到全局和局部电子地图,提高地图融合效率,同时提升电子地图的构建精度、观测区域、鲁棒性和容错性;所述目标定位模块和全局路径规划模块均与所述地图创建模块数据连接,目标定位模块用于获取和定位目标图书所在书架号、书架层、图书编号以及在电子地图中的位置等信息;全局路径规划模块用于根据所创电子地图,机械臂所在位置和目标书架规划最佳行驶路径,在导航中使用a*算法进行全局路径的规划,计算出本实用新型实施例1到目标位置的最优路线,作为本实用新型实施例1的全局路线;所述本地路径规划模块与所述imu模块106连接,并根据imu模块106所反馈数据,采用卡尔曼滤波算法确定本实用新型实施例1所在地图的位置和里程信息,进行位姿估计,并利用蒙特卡罗定位算法用于位置矫正,同时使用dwa算法搜索躲避和行进的多条路径,帮助读者在实际导航过程中躲避静态或动态障碍物,实时规划最佳行驶路线,实现精准导航;所述人机交互模块与所述触摸屏2连接,用于实现人机交互。带微控制单元的下位机102可接收激光测距传感器105的返回信号,对障碍物进行距离判断,也可发送指令给抓取装置3对书本进行取书操作;带微控制单元的下位机102可与带ros系统的上位机101进行通信,将采集并计算得到的位姿信息和目标书架位置信息发送给带ros系统的上位机101,并接受带ros系统的上位机101发送的控制指令。
36.本实用新型实施例1在执行取书任务时,具体步骤如下:
37.(1)读者在进入图书馆后将本实用新型实施例1随身携带,通过本实用新型实施例1的触摸屏2浏览图书馆内的书籍信息,并确认要借阅的目标书籍。
38.(2)带ros系统的上位机101通过目标定位模块,定位借阅者和目标书籍所在位置后,通过全局路径规划模块和本地路径规划模块,实现自动导航,带领读者到达目标书籍所在的书架。
39.(3)到达目标书架位置后,通过激光测距传感器105调整本实用新型实施例1与书架的相对位置,通过openmv摄像头301扫描书籍,待识别到目标书籍后,使用机械臂抓取目标,并交付给读者。
40.(4)若读者借阅多本书籍,则重复步骤(1)~(3)执行对下一目标的抓取。
41.通过上述步骤,读者可快速找到想要阅读的图书,对于残障人士等特殊人群,可通过抓取装置3获取放置在高处的图书,无需麻烦图书馆的工作人员,减轻了图书馆的工作人员的工作负担。
42.实施例2:
43.如图5~图7所示,在本实用新型实施例1的基础上,本实用新型实施例2还包括升降平台5,所述升降平台5设置在所述控制盒1上,并与所述控制盒1和供电单元4电路连接;所述抓取装置3设置在升降平台5上。
44.所述升降平台包括第二底座501、承重台502、升降臂503、平轴504、堵板505、调节轴506、调节电机507和连接轴510;所述第二底座501和承重台502之间设置有偶数对升降臂503,同一水平面对应的两对升降臂503通过所述平轴504连接,所述升降臂503包括第一升
降架508和所述第二升降架509,所述第一升降架508和所述第二升降架509交叉旋转连接为一对升降臂503;同侧相邻两升降臂503的第一升降架508和所述第二升降架509通过所述连接轴510连接;同一水平面对应的两对升降臂503的第一升降架508和所述第二升降架509通过所述堵板505进行固定连接;所述调节电机507与所述调节轴506连接,所述调节轴507与所述连接轴510连接,靠近调节电机507的连接轴510上设置有穿孔,所述调节轴506穿过所述穿孔并通过螺纹与远离调节电机507的连接轴510连接。所述调节电机507与带微控制单元的下位机102电路连接,由带微控制单元的下位机102控制调节电机507转动,调节电机507带动调节轴506转动,靠近调节电机507的连接轴510上没有螺纹,在调节轴506转动的过程中不会移动,而远离调节电机507的连接轴510在螺纹作用下沿着调节轴506移动,改变第一升降架508和第二升降架509的夹角,实现升降平台5的高度调节。根据实际的应用场景,所述升降臂503的对数可设置为2对、4对或6对,使本实用新型实施例2匹配不同的书架高度。在本实用新型实施例2中,所述升降臂503的对数为4对,垂直升降高度区间为5cm~80cm。
45.本实用新型实施例2在执行取书任务时,具体步骤如下:
46.(1)读者在进入图书馆后将本实用新型实施例2随身携带,通过本实用新型实施例2的触摸屏2浏览图书馆内的书籍信息,并确认要借阅的目标书籍。
47.(2)带ros系统的上位机101通过目标定位模块,定位借阅者和目标书籍所在位置后,通过全局路径规划模块和本地路径规划模块,实现自动导航,带领读者到达目标书籍所在的书架。
48.(3)到达目标书架位置后,通过激光测距传感器105调整本实用新型实施例2与书架的相对位置,再通过调整升降平台2的高度,使抓取装置3达到对应书架层,通过openmv摄像头301扫描书籍,待识别到目标书籍后,使用机械臂抓取目标,并交付给读者。
49.(4)若读者借阅多本书籍,则重复步骤(1)~(3)执行对下一目标的抓取。
50.通过增设升降平台5,使本实用新型实施例2可匹配不同的书架高度,扩大抓取装置3的作业范围。
51.本实用新型实施例同时使用视觉slam和激光slam的融合建图提高地图融合效率,提升电子地图的构建精度、观测区域、鲁棒性和容错性;采用卡尔曼滤波算法处理imu模块采集的惯性数据得到机械臂的位姿信息,提高了机械臂位姿估算的准确度;分别采用a*算法和dwa算法实现全局路径规划和本地路径规划,并用蒙特卡罗定位算法进行位置校正,使得机械臂的定位更加准确,从而实现精准导航。读者可通过出触摸屏2上的界面选择想要的图书,本实用新型实施例可自动定位读者想要阅读的图书的所在书架位置并为读者进行自动导航,带领读者前往目标书架。本实用新型实施例可有效协助残障人士等特殊人群获取在高层书架的书籍,降低图书馆工作人员的负担;通过升降平台5可实现对书架上不同高度书架层上目标的抓取作业,同时使用openmv摄像头进行坐标定位,使抓取作业准确度更高,速度更快。
52.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。