1.本实用新型涉及一种便于调节输出阻力及健身行程,同时,也能够在向心运行与离心运行之间随时切换的用于健身器械的力输出部件。
背景技术:
2.现有的健身器械大多通过增加或减少配重块来达到调节其向健身者输出的阻力的目的。例如:在公开号为cn201461923u、公开日为12020911、名称为“配重装置以及健身器材”的实用新型专利中,其通过滑动组件和配重片沿着安装杆的长度方向来回滑动,来调整配重组件的整体的力矩,从而实现健身器材的阻力调整;在公开号为cn120775899u、公开日为12010330、名称为“容器式组合臂力健身器”的实用新型专利中,其使用方式是:将配重物装入配重瓶内,拧紧瓶盖后,把配重瓶结合在配重瓶定位槽,将粘扣带两端包绕所有的配重瓶,并互相粘扣,使每个配重瓶固定不动,便可使用组合成的臂力健身器进行健身运动。
3.由于配重块大多具有一定重量,因此在调节健身器械上的配重块时稍有不慎就会对操作者产生伤害,因此普通的健身者不适宜单独对健身器械上的配重块进行调节,需要在有经验人员的指导下进行操作或者由有经验人员(通常为健身教练)代为进行操作。配重块不仅调节起来非常麻烦,更为重要的是,不同的健身者在利用同一台健身器械进行锻炼时,其使用的配重块的总重量是不同的,但往往有经验的健身者也无法准确判断与其相适应的配重块的总重量。而由于前文所述,调节健身器械上的配重块是非常困难的,导致了健身者无法在健身过程中根据其健身体验来及时调节健身器械上的配重块总重量,其结果要么使得健身者无法得到有效锻炼,要么使得健身者过度锻炼,增加了受伤的风险。并且现有的健身器械,其健身行程大多无法调节,即使可以调节行程,也是非常麻烦的,需要专业人员的帮助才能完成。而对于不同高度的健身者,其健身行程也是不同的,因此,现有的健身器械也无法确保健身者能够得到有效的锻炼。最后,现有的健身器械的阻力是通过配重块产生的,由此健身者在进行锻炼时,要么只能进行离心力的锻炼,要么只能进行向心力的锻炼,同样影响了健身效果。
技术实现要素:
4.本实用新型要解决的技术问题是:现有的健身器械依靠配重块来调节输出的阻力无法实时地与健身者的出力相匹配,并且现有的健身器械无法调节健身行程,也无法在一次健身过程中同时进行离心力及向心力的锻炼。
5.为了解决上述技术问题,本实用新型的技术方案是提供了一种健身器械智能动力柜,其特征在于,包括:
6.重力盘,重力盘可绕转动轴所在的轴线转动;
7.转动轴调节机构,用于在控制单元的控制下调节转动轴相对于重力盘的位置,控制单元与人机交互单元相连;
8.健身者在健身过程中向重力盘施力,使重力盘由起始位置转动至终止位置或由终
止位置转动回起始位置;
9.施力机构,健身者通过施力机构将力施加在重力盘上;
10.行程检测单元,用于检测重力盘的运动行程,并将检测到的数据反馈给控制单元;
11.力检测单元,用于检测健身者在健身过程中施加在重力盘上的力,并将检测到的数据反馈给控制单元。
12.优选地,所述转动轴调节机构包括设于所述重力盘上的水平位移机构,水平位移机构在所述控制单元的控制下带动所述转动轴沿水平方向左、右移动。
13.优选地,所述水平位移机构包括设于所述重力盘上的水平导轨,水平导轨上设有与其配合的滑块,安装座设于滑块上,所述转动轴固定在安装座上,安装座内设有滚珠轴承,滚珠轴承穿设在丝杆上,丝杆与由所述控制单元控制的步进电机相联结。
14.优选地,所述重力盘的后侧设有重力盘支柱,重力盘支柱的顶部设有支点轴承,所述转动轴穿设在支点轴承内。
15.优选地,所述施力机构采用带编码器的绳索调节机构,编码器连接所述控制单元。
16.优选地,所述绳索调节机构包括主动轮机构、被动轮机构及收/放线机构;钢丝绳一的一端与所述重力盘中左右两侧端部中的任意一端连接固定,另一端绕经过渡轮组一后缠绕在被动轮机构上;被动轮机构与主动轮机构同轴布置,且被动轮机构与主动轮机构同步转动;钢丝绳二的一端缠绕在主动轮机构上,另一端绕经过渡轮组二后被健身者所操作,健身者通过钢丝绳二向所述重力盘施力。
17.优选地,所述行程检测单元采用设于所述主动轮机构上的编码器;所述力检测单元采用设于所述钢丝绳二上的拉力传感器;编码器及拉力传感器与所述控制单元相连。
18.优选地,还包括阻力调节机构,用于向所述重力盘施加阻力,当阻力调节机构向所述重力盘施加阻力时,所述重力盘在阻力、所述健身者向所述重力盘施加的所述力的共同作用下转动,阻力调节机构通过人机互动界面设定目标值,向所述重力盘施加的阻力用于调节所述重力盘的转动速度,使设备按目标速度运行。
19.优选地,所述阻力调节机构包括由所述控制单元控制的阻尼缸,阻尼缸的缸体铰接固定,阻尼缸的伸缩端与所述重力盘中左右两侧端部中与钢丝绳一的一端所在位置同侧的端部铰接。
20.优选地,所述重力盘的下方设有重力盘限位柱,重力盘限位柱的顶部设有缓冲层。
21.与现有技术相比,本实用新型具有如下优点:
22.(1)本实用新型具有较高的安全性
23.本实用新型利用拉力传感器实时检测健身者施加在健身器械上的作用力,依据该作用力调节转动轴相对于重力盘的位置,从而设置与当前健身者的锻炼水平相匹配的阻力,避免健身器械施加在健身者上的力超过其安全承力阈值,从而有效保护健身者。更进一步,采用液压式阻尼缸来做缓冲,使得本实用新型可以轻易地实现硬件限位保护,当通过拉力传感器检测到非正常力值时,可以及时利用液压式阻尼缸进行限速保护,暂停健身动作,也可以利用人机交互单元产生告警,使得相关人员能够在第一时间介入处置,指导并确保健身者的安全。
24.(2)采用本实用新型可以更为高效地锻炼
25.通过调节转动轴相对于重力盘的中心支点位置,使得离心阶段的力值发生改变,
从而让健身者在一次健身过程中可以同时完成向心和离心双向锻炼。并且健身者可以根据需要设定向心力值,而离心力值则随健身者的自发力实时变化,从而大大提升锻炼效果。
26.(3)通过本实用新型的人机交互单元,健身者可以实时查看锻炼效果,并且本实用新型利用拉力传感器及编码器收集数据后,还可以进行数据分析与规划,使锻炼更为科学。
附图说明
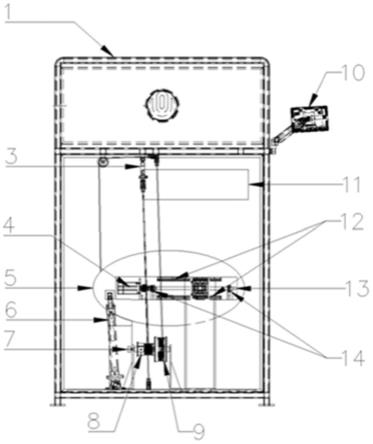
27.图1为本实用新型的平面图;
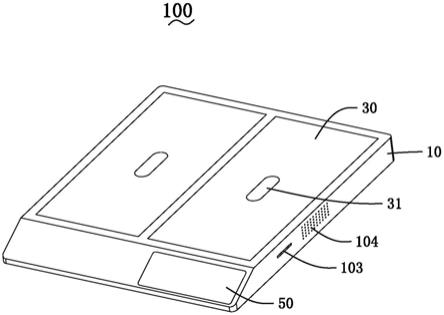
28.图2为本实用新型的立体示意图;
29.图3为本实用新型的局部立体示意图。
具体实施方式
30.下面结合具体实施例,进一步阐述本实用新型。应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
31.如图1及图2所示,本实用新型公开的一种健身器械智能动力柜包括柜体1,实用新型中的大部分部件都设置在柜体1内。柜体1内设置有椭圆形的重力盘5,本实施例中,重力盘5依靠钢丝绳一悬吊在柜体1内,并且重力盘5可以绕转动轴2所在的轴线转动。本实用新型中,转动轴2相对于重力盘5的位置是可以调节的,重力盘5上相对于转动轴2的位置是转动中心,转动中心偏离重力盘5的质量中心,从而形成了类似偏心轮的结果。并且通过调节转动轴2的位置达到调节转动中心的目的,转动中心的位置不同其施加在健身者上的阻力也不相同。本实施例中,转动轴2固定在安装座上,安装座的顶面及底面分别固定有一个滑块20,两个滑块20分别与两根导轨12相配合,导轨12固定在重力盘5内。安装座内设有滚珠轴承,滚珠轴承穿设在丝杆13上,丝杆13则与步进电机4相联结。步进电机4由设于柜体1内的控制单元11控制,控制单元11接收人机交互单元10(例如触摸屏)给出的控制指令后,依据该控制指令控制步进电机4,由步进电机4驱动丝杆13绕其两端轴承14转动,从而带动安装座及其上的转动轴2移动至目标位置,从而达到调节重力盘5转动中心位置的目的。
32.健身者在健身过程中向重力盘5施力,使重力盘5由起始位置转动至终止位置,或由终止位置转动回起始位置。本实施例中可以通过编码器7来检测钢丝绳二的收/放绳长度从而达到调节终止位置的目的。具体而言,本实施例中,钢丝绳一的一端与重力盘5的左端部连接固定,另一端绕经过渡轮组一后缠绕在被动轮机构9上。被动轮机构9与主动轮机构8同轴布置,且被动轮机构9与主动轮机构8同步转动。被动轮机构9固定在绕线轮支柱18上,主动轮机构8固定在绕线轮支柱17上。钢丝绳二的一端缠绕在主动轮机构8上,另一端绕经过渡轮组二后被健身者所操作,健身者通过钢丝绳二向重力盘5施力。具体而言,健身者拉动钢丝绳二后,带动主动轮机构8转动,进而带动被动轮机构9转动,从而由钢丝绳二将重力盘5由起始位置向终止位置拉动。健身者释放钢丝绳二后,带动主动轮机构8向另外一个方向转动,进而带动被动轮机构9向另外一个方向转动,从而由钢丝绳二将重力盘5由终止位置向起始位置缓慢放下。为了达到调节重力盘5的终止位置的目的,本实用新型中主动轮机构8带有编码器7,编码器7将采集到的信号反馈给控制单元,从而判断得到主动轮机构8的
转动圈数,从而得到放出的或收回的钢丝绳二的长度。由于被动轮机构9跟随主动轮机构8同步转动,因而,通过放出的或收回的钢丝绳二的长度可以换算得到放出的或收回的钢丝绳一的长度。当判断当前健身者的终止位置时,转动中心先调节至重力盘5的质量中心,由当前健身者带动重力盘5向上转动至终止位置,控制单元通过编码器7检测到钢丝绳二的收线长度,并将该长度记录下来。健身者在健身过程中向重力盘5施力时,主动轮机构8转而由健身者控制转动,使得重力盘5向上转动,主动轮机构8及被动轮机构9同步收线。通过设置在钢丝绳二上的拉力传感器3检测健身者施加在重力盘5上的力,控制单元11依据检测到的力可以控制转动轴2的位置,从而改变重力盘5产生的阻力。在此过程中,控制单元11通过编码器7检测主动轮机构8转动的圈数,进而检测钢丝绳二的收线长度,当收线长度达到之前的记录值时,使得重力盘5产生更大的力,该力大于健身者施加的力,从而使得重力盘5向下转动。此后,主动轮机构8向另外一个方向转动。当重力盘5从终止位置返回起始位置时,通过钢丝绳一及被动轮机构9带动主动轮机构8向另外一个方向转动,与此同时健身者通过钢丝绳二抵抗该阻力,使得重力盘5有向上转动的趋势。在此过程中,通过设置在钢丝绳二上的拉力传感器3检测健身者施加在重力盘5上的力,控制单元11依据检测到的力可以控制转动轴2的位置,从而改变重力盘5产生的阻力,使得阻力始终大于健身者施加在重力盘5上的力,主动轮机构8及被动轮机构9同步放线,当达到之前检测到的收/放线长度时,控制单元控制重力盘5减小产生的力,并使得该力小于健身者施加的力,从而让重力盘5再次被健身者带动向上转动,如此往复完成向心力及离心力的锻炼。
33.本实用新型提供的健身器械智能动力柜不仅能够实现在一次锻炼中完成向心力及离心力的锻炼,而且能够调节健身行程。更进一步,本实用新型还能够调节重力盘5的转动速度。具体而言,本实用新型的阻力调节机构还包括由控制单元11控制的可调节的液压式阻尼缸6,液压式阻尼缸6的缸体与柜体1的底部铰接固定,液压式阻尼缸6的伸缩端与重力盘5的左端部铰接。控制单元11控制液压式阻尼缸6的控油电磁阀。当控油电磁阀完全打开时,使液压式阻尼缸6完全失去阻尼作用,则重力盘5上下转动的速度完全由健身者施加力决定。若人机交互单元10下发速度数据给控制单元11,则控制单元11依据速度数据结合通过编码器7检测到的脉冲数对控油电磁阀的开阀角度进行实时调整。当通过编码器7检测到的脉冲数大于设定速度数据时,减小油控电磁阀的开阀角度,提高阻尼力,达到降低重力盘5转动速度的目的。当通过编码器7检测到的脉冲数大于速度数据时,增大油控电磁阀的开阀角度,降低阻尼力,达到提高重力盘5转动速度的目的。
34.本实施例中,在重力盘5的下方还设有重力盘限位柱16,重力盘限位柱16的顶部设有缓冲层,避免机械的硬碰撞。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。