1.本发明涉及一种考虑柔性电、热负荷的微网分布鲁棒调度方法,属于微网调度优化技术领域。
背景技术:
2.微网能够在满足需求侧电、热、气等类型负荷的基础上,规划调度各能源设备出力,进而降低系统建设运行成本,提高清洁能源利用率。近年来,电力市场的改革使得柔性负荷在微网调度优化中得到关注,成为了调节用能方式的重要手段。相较于刚性负荷,柔性负荷能够在参与调度时,改变自身大小及时段,从而平滑负荷曲线,提升微网经济效益。然而,风电出力的不确定性却给计及柔性负荷的微网调度带来了挑战。
3.现有处理风电出力不确定的方法主要为随机优化和鲁棒优化,随机优化利用先前经验概率生成具体场景求解最小期望成本的调度方案,计算量过大并且不能保证概率分布的准确性;鲁棒优化利用不确定集描述不确定性求解最恶劣场景下微网调度方案,结果过于保守。分布鲁棒方法的提出能够明显改善随机优化及鲁棒优化的片面性,兼顾保守度和经济性。
技术实现要素:
4.本发明的目的在于提供一种考虑柔性电、热负荷的微网分布鲁棒调度方法,以解决现有处理风电出力不确定的方法不能保证概率分布的准确性的缺陷。
5.一种考虑柔性电、热负荷的微网分布鲁棒调度方法,所述方法包括步骤:
6.根据微网调度模型设定约束条件;
7.通过约束条件建立微网调度模型的目标函数;
8.考虑风电不确定性,采用数据驱动方法对目标函数进行改写;
9.利用列约束生成算法对优化的目标函数进行分解迭代,计算出模型最优调度方案。
10.进一步地,所述微网调度模型的目标函数表达式:
[0011][0012]
式中,c
buy
代表购电购气成本,c
co2
代表二氧化碳排放治理成本,c
m
代表设备维护成本,c
flex
代表柔性负荷调度补偿成本。
[0013]
在考虑风电出力不确定性后,对目标函数进行改写,得到目标函数的分布鲁棒形式:
[0014][0015]
式中,x代表预调度阶段变量,主要包括微网购售能大小、各设备出力、购售能标志位及储能标志位等;y
n
代表各场景再调度阶段各设备调整出力大小;ζ
n
代表不确定变量,为各场景下风机的具体出力;p
n
代表各初始场景的概率分布;ω代表可行域。
[0016]
进一步地,初始场景及其初始概率分布获取方法包括:
[0017]
根据历史数据个数m初始化各场景概率:
[0018][0019]
计算第a个场景和第b个场景的距离:
[0020][0021]
生成场景距离矩阵l:
[0022][0023]
确定场景距离矩阵l中每行最小元素,并生成最小场景距离矩阵k:
[0024][0025]
确定k中最小元素所在的行数w,并对初始场景w进行削减,同时更新与场景w距离最近的场景u的概率:
[0026]
p
′
u
=p
w
p
u
[0027]
循环削减若干次得到n组初始场景及其初始概率p
0,n
。
[0028]
进一步地,对优化的目标函数进行分解迭代步骤包括:对优化目标函数进行分解为主问题和子问题迭代求解:
[0029]
主问题主要根据最恶劣概率分布值,求解最佳经济效益的预调度方案,给模型提供下界值:
[0030][0031][0032]
子问题基于主问题所求解出的预调度方案进行调整,并给模型提供上界值:
[0033][0034]
根据主问题的求解,式(64)中各个场景下的最小调整成本写为子问题表示为:
[0035][0036]
进一步地,利用列约束生成算法对主问题和子问题迭代求解过程如下:
[0037]
设定模型上界ub= ∞,下界lb=
‑
∞,迭代次数k=1,上下界之差为很小正实数ε;
[0038]
求解主问题,得到最优解同时更新下界值
[0039]
在的基础上求解子问题,返回风机出力最恶劣概率分布以及目标函数值同时更新下界值
[0040]
若ub
‑
lb<ε,停止迭代,输出最优解。
[0041]
进一步地,所述微网调度模型的目标函数包括微网的购电售电成本、从气网的购气成本、柔性负荷调度成本、设备运行维护成本、co2排放成本。
[0042]
进一步地,所述微网调度模型的约束条件主要包括柔性负荷调度约束、微网购售电约束、微网购气约束、耦合设备约束、储能设备约束、能量平衡约束,且所述柔性负荷调度约束包括柔性电负荷调度约束及柔性热负荷调度约束。
[0043]
与现有技术相比,本发明所达到的有益效果:通过需求侧柔性负荷的调度参与,微网的负荷曲线得到了平滑并更加贴近风机出力曲线的趋势,减轻微网在用能高峰期的供能压力;在处理风电出力不确定性方面,针对传统随机优化和鲁棒优化过于经济亦或者过于保守的片面性,利用数据驱动下的分布鲁棒优化方法进行改善,使得最终的调度方案兼顾经济性和保守度。
附图说明
[0044]
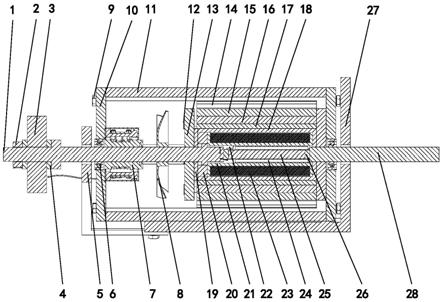
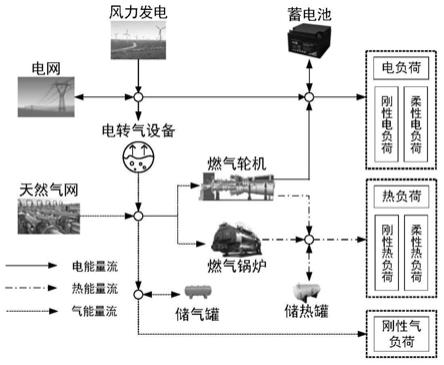
图1是计及柔性电、热负荷的电、热、气多能耦合型微网结构图;
[0045]
图2是数据驱动下计及柔性电、热负荷的电、热、气多能耦合型微网调度模型建立求解流程图。
具体实施方式
[0046]
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
[0047]
如图1
‑
图2所示,一种考虑柔性电、热负荷的微网分布鲁棒调度方法,所述方法包括步骤:
[0048]
根据微网调度模型设定约束条件;
[0049]
根据约束条件建立微网调度模型的目标函数;
[0050]
考虑风电不确定性,采用数据驱动方法对目标函数进行改写;
[0051]
利用列约束生成算法对优化的目标函数进行分解迭代,计算出模型最优调度方案。
[0052]
s1.所述微网调度模型的目标函数具体为:
[0053][0054]
式中,c
buy
代表购电购气成本,c
co2
代表二氧化碳排放治理成本,c
m
代表设备维护成本,c
flex
代表柔性负荷调度补偿成本。
[0055]
且所述购电购气成本为:
[0056]
[0057]
式中,代表t时刻微网购电价格;代表t时刻微网售电价格;代表t时刻购气价格;代表t时刻微网购电量;代表t时刻微网售电量;代表t时刻微网购气量。
[0058]
且所述二氧化碳排放治理成本为:
[0059][0060]
式中,代表t时刻燃气轮机的产电量;代表t时刻燃气轮机的产热量;代表t时刻燃气锅炉的产热量;γ
grid
、γ
gb
和γ
gt
分别代表电网、燃气轮机及燃气锅炉的二氧化碳排放系数;τ代表二氧化碳治理成本系数。
[0061]
且所述柔性负荷调度补偿成本为:
[0062][0063]
式中,代表可平移负荷用户可接受起止平移时间;代表可转移负荷用户可接受起止平移时间;α
t
代表用来判断在t时刻负荷是否进行平移的0
‑
1变量,若负荷平移至t时刻取1,反之取0;β
t
为0
‑
1变量,若t时段负荷进行削减则取1,反之取0;η
cut
表示可削减负荷削减率;代表进行平移后的可平移负荷分布;分别代表转移前后可转移负荷功率分布;为削减前各时段可削减负荷功率。
[0064]
且所述设备运行维护成本为:
[0065][0066]
式中,m
gb
代表燃气锅炉设备维护成本系数;m
gt
代表燃气轮机设备维护成本系数;m
p2g
代表电转气设备维护成本系数;m
es
代表蓄电池维护成本系数;m
hs
代表储热罐维护成本系数;m
gs
代表储气罐维护成本系数;代表t时刻燃气锅炉的产热量;代表t时刻燃气轮机的产电量;代表t时刻燃气轮机的产热量;代表电转气设备t时刻消耗的电能;代表t时刻蓄电池的充电功率;代表t时刻蓄电池的放电功率;代表t时刻储热罐的充热功率;代表t时刻储热罐的放热功率;代表t时刻储热罐的充热功率;分别代表t时刻储热罐的放热功率。
[0067]
s2.所述微网调度模型的约束条件主要包括柔性负荷调度约束、微网购售电约束、微网购气约束、耦合设备约束、储能设备约束、能量平衡约束。
[0068]
且所述柔性负荷调度约束包括柔性电负荷调度约束及柔性热负荷调度约束。
[0069]
(1)所述柔性电负荷调度约束为:
[0070][0071][0072][0073][0074][0075][0076]
式(6)、(7)为可平移电负荷调度约束,代表可平移负荷平移后起始时间;代表可平移负荷所持续的总时间;α
t
代表用来判断在t时刻负荷是否进行平移的0
‑
1变量,若负荷平移至t时刻取1,反之取0。
[0077]
式(8)、(9)为可转移电负荷调度约束,代表转移前可转移负荷功率分布;代表转移后可转移负荷功率分布;代表转移后各时段可转移负荷最小功率限制;代表转移后各时段可转移负荷最大功率限制。
[0078]
式(10)、(11)为可削减电负荷调度约束,β
min
代表最小削减次数限制;β
max
代表最大削减次数限制,n
max
代表最大持续削减次数限制。
[0079]
(2)所述柔性热负荷调度约束为:
[0080]
t
h,min
≤t
h,t
≤t
h,max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0081][0082][0083]
式中,t
h,t
为t时刻室内温度;t
od,t
为t时刻室外温度;t
h,min
为室内人体舒适温度下限;t
h,max
为室内人体舒适温度上限;s代表供热面积;ε代表建筑物内外温差散热系数;为t时刻柔性热负荷。
[0084]
且所述微网购电售电约束为:
[0085][0086][0087][0088]
式中,代表t时刻微网购电量;代表t时刻微网售电量;代表微网购电上限;代表微网售电上限;是微网购电标志位0
‑
1变量,为1时代表微网购电;是微网售电标志位0
‑
1变量,为1时代表微网售电。
[0089]
且所述微网购气约束为:
[0090][0091]
式中,代表t时刻微网购气量;代表电微网购气上限。
[0092]
且所述微网耦合设备约束包括燃气轮机约束、电转气设备约束、燃气锅炉约束。
[0093]
(1)所述燃气轮机约束为:
[0094][0095][0096][0097][0098][0099][0100]
式中,lhv代表天然气低热值; η
gt,e
代表燃气轮机的产电效率;η
gt,h
代表燃气轮机的产热效率;代表t时刻燃气轮机消耗的天然气体积;代表燃气轮机的产电上限;代表燃气轮机的产热上限;代表燃气轮机的产电爬坡功率限制;代表燃气轮机的产热爬坡功率限制;代表t
‑
1时刻燃气轮机的产电量;代表t
‑
1时刻燃气轮机的产热量。
[0101]
(2)所述电转气设备约束为:
[0102][0103][0104]
式中,η
p2g
代表燃气轮机的产电效率;代表t时刻电转气设备的产气体积;代表电转气设备的产气上限。
[0105]
(3)所述燃气锅炉约束为:
[0106][0107][0108][0109]
式中,η
gb
代表燃气锅炉的产热效率;代表t时刻燃气锅炉消耗的天然气体积;代表燃气锅炉的产热上限;代表燃气锅炉的产热爬坡功率限制;代表t
‑
1时刻燃气锅炉的产热量。
[0110]
且所述储能设备约束包括蓄电池约束、储热罐约束和储气罐约束。
[0111]
(1)所述蓄电池约束为:
[0112]
[0113][0114][0115][0116][0117]
式中,代表蓄电池t时刻储电量;代表蓄电池t
‑
1时刻储电量;代表蓄电池充电效率;代表蓄电池放电效率;是蓄电池充电标志位0
‑
1变量,蓄电池充电时为1;是蓄电池放电标志位0
‑
1变量,蓄电池放电时为1;代表蓄电池最大充电量;代表蓄电池最大放电量;代表蓄电池最小储电量;代表蓄电池最大储电量。
[0118]
(2)所述储热罐约束为:
[0119][0120][0121][0122][0123][0124]
式中,代表储热罐t时刻储热量;代表储热罐t
‑
1时刻储热量;代表储热罐充热效率;代表储热罐放热效率;是储热罐充热标志位0
‑
1变量,储热罐充热时为1;是储热罐放热标志位0
‑
1变量,储热罐放热时为1;代表储热罐最大充热量;代表储热罐最大放热量;代表储热罐最小储热量;代表蓄电池最大储热量。
[0125]
(3)所述储气罐约束为:
[0126][0127][0128][0129][0130][0131]
式中,代表储气罐t时刻储气量;代表储气罐t
‑
1时刻储气体量;代表储气罐充气效率;代表储气罐放气效率;是储气罐充气标志位0
‑
1变量,储气罐充气时为1;是储气罐放气标志位0
‑
1变量,储气罐放气时为1;代表储气罐最大充气量;代表
储气罐最大放气量;代表储气罐最小储气量;代表储气罐最大储气量。
[0132]
且所述能量平衡约束包括电能平衡约束、热能平衡约束以及天然气平衡约束。
[0133]
(1)所述电能平衡约束为:
[0134]
p
tbuy
p
twt
p
tgt
p
tdis
=p
tsell
p
tp2g
p
tch
p
tl
p
tshift
p
ttrans
p
tcut
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(45)
[0135]
式中,代表t时刻风机预测出力;代表t时刻微网刚性电负荷;代表t时刻微网可削减电负荷;
[0136]
(2)所述热能平衡约束为:
[0137][0138]
式中,代表t时刻微网刚性热负荷。
[0139]
(3)所述天然气平衡约束为:
[0140][0141]
式中,代表t时刻微网气负荷。
[0142]
s3.所述利用风电历史数据进行场景削减方法得到初始场景及其初始概率的方法为:
[0143]
s31.根据历史数据个数m初始化各场景概率:
[0144][0145]
s32.计算第a个场景和第b个场景的距离:
[0146][0147]
s33.生成场景距离矩阵l:
[0148][0149]
s34.确定场景距离矩阵l中每行最小元素,并生成最小场景距离矩阵k:
[0150][0151]
s35.确定k中最小元素所在的行数w,并对初始场景w进行削减,同时更新与场景w距离最近的场景u的概率:
[0152]
p
′
u
=p
w
p
u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(52)
[0153]
s36.循环削减若干次得到n组初始场景及其初始概率p
0,n
。
[0154]
s4.当计及风电不确定性后,将式(1)改写为分布鲁棒优化模型。所述分布鲁棒优
化模型为:
[0155][0156]
d
t
x=d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(54)
[0157]
e
t
x≤e
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(55)
[0158]
f
t
x g
t
y=g
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(56)
[0159]
h
t
x i
t
y≤h
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(57)
[0160]
j
t
x k
t
y=rζ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(58)
[0161]
式中,x代表预调度阶段变量,主要包括微网购售能大小、各设备出力、购售能标志位及储能标志位等;y
n
代表各场景再调度阶段各设备调整出力大小;ζ
n
代表不确定变量,为各场景下风机的具体出力;p
n
和ω分别代表各场景的概率分布及其可行域;式(55)、(56)为预调度阶段约束,主要包括式(6)
‑
(47);式(57)、(58)为再调度阶段约束,具体含义为:在预调度出力基础上,各设备的调整量必须满足设备的出力上下限、爬坡约束以及能量等式约束;式(59)为各场景下含风机出力不确定变量的电能等式约束。在式(36)所述模型中,场景概率p
n
在理论上可以为任何范围,但是为保证调度方案的经济性与可行性,在初始场景概率的基础上,利用1
‑
范数和∞
‑
范数对场景概率进行约束:
[0162][0163]
式中,θ1、θ
∞
分别代表1
‑
范数和∞
‑
范数条件下实际场景概率的允许偏差值。
[0164]
式(60)中,p
n
满足置信集:
[0165][0166]
令式(61)两式右侧置信度分别为α1和α
∞
,则有:
[0167][0168]
s5.针对s4所建立的数据驱动下计及柔性电\热负荷的分布鲁棒优化模型,利用列约束生成算法进行分解迭代,求解所建模型以制定调度方案。
[0169]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。