1.本发明应用于机器人触觉感知领域,具体是一种基于机器人的触觉数据感知分析方法。
背景技术:
2.近年来,不少研究者基于机器人触觉进行材质识别的研究。因为现如今,使用机器人探索非结构化环境的兴趣越来越强烈,而机器人集成触觉后,更在于其智能化的实现。机器人具有材质辨识能力,识别物体,下一步的操作将会更加精细和灵敏。
3.机器人触觉的实现有赖于触觉传感器的发展,柔性触觉传感器的出现使得机器人触觉仿人化成为可能。目前研究者为进行材质辨识使用的传感器主要可分为两类,一类传感器的频响较高,即基于动态力信息的触觉传感器,比如来自syntouch的biotac,以及依靠光学原理获取力、力矩信息的六维力传感器optoforce;另一类是利用高空间分辨率的触觉传感器,即基于分布力信息的触觉传感器,比如,tekscan的压力映射传感器,还有gelsight传感器。使用这些触觉传感器,结合机器学习算法或深度学习方法,可以实现对材质的准确辨识。
4.当前采用机器人触觉进行材质识别的痛点其一在于机器人采样时间过长,缺乏识别效率,例如文献“material recognition using tactile sensing”中的按压及滑动动作采样用时20s,文献“an extreme learning machine
‑
based neuromorphic tactile sensing system for texture recognition”中的预接触、滑动及保持采样用时12s。其二在于研究纹理识别时,大多数研究者将触觉传感器安装在稳定工作台上,且控制材质与传感器进行稳定接触,如训练和测试都采取同一位姿,同一接触力或同一滑动速度等方式采样,在实际的机器人操作应用中,由于对象装配等带来的重定位误差,使得这样的实验设置产生的识别结果缺乏鲁棒性。其三在于大多数识别算法需要对样本进行复杂的特征提取,且设计特征并无权威理论依据。综上,当前缺乏兼顾采样效率,合理采样模式的机器人材质识别装置及分析方法。
技术实现要素:
5.本发明所要解决的技术问题是针对现有技术的不足,提供一种基于机器人的触觉数据感知分析方法。
6.为解决上述技术问题,本发明的一种基于机器人的触觉数据感知分析方法,所述机器人为接触端设有传感器的机械臂,所述基于机器人触觉的鲁棒感知分析方法包括如下步骤:
7.构建材质样本数据库;
8.选取预设的具有注意力机制模块的网络模型;
9.将样本数据集输入网络模型进行训练并验证;
10.将机械臂的传感器触觉数据输入训练完成的网络模型输出分析结果。
11.作为一种可能的实施方式,进一步的,所述构建材质样本数据库步骤具体包括:
12.s11、选取a组不同结构的样本;
13.s12、控制机械臂与样本接触并反馈触觉信息确定预设力度大小;
14.s13、控制机械臂分别与a组不同结构的样本依次接触,当接触力度达到预设力度大小后,以图像形式存下当前状态下传感器的反馈触觉信息进行样本收集。
15.作为一种可能的实施方式,进一步的,所述步骤s11中的样本结构均为柔性材质的第一物件包裹第二物件构成。
16.作为一种可能的实施方式,进一步的,所述步骤s12具体为:
17.开启python脚本进行数据采集,首先进行机械臂、传感器的初始化动作,接着机械臂移动到初始设定位姿p
i
(x,y,z,r
x
,r
y
,r
z
),在y方向以v=1mm/s的速度进行推进,直到机械臂上的传感器接触到材料,开始向上位机反馈触觉信息确定预设力度,阵列式触觉传感器体现的预设力度大小f(t
k
)是所有传感点力值之和,表达式如(1)所示:
[0018][0019]
其中,f
i,j
(t
k
)是在时刻t
k
在i行j列传感单元体现的力值,n,m代表触觉传感器的行和列。
[0020]
作为一种可能的实施方式,进一步的,所述步骤s13具体为:取a组不同结构的样本中的一组,利用带有触觉传感器的机械臂执行探索动作,设开始探索动作前机械臂位姿为p
b
;首先,改变机械臂的关节转角控制参数θ(θ1,θ2,θ3,θ4,θ5,θ6)中的θ5和θ6,两个参数相对初始关节转角的改变量分别是δθ5∈(
‑5°
,5
°
)中的随机数,δθ6∈(
‑
45
°
,45
°
)中的随机数,改变后的参数值记θ
i
;其次,改变机械臂末端执行器位姿表示p(x,y,z,r
x
,r
y
,r
z
)的z参数,z参数相对机械臂末端执行器位姿的改变量是δz∈(
‑
5cm,5cm)中的随机数,改变后的参数值记p
i
。每一次执行动作t
i
∈(θ
i
,p
i
),上位机判断该次探索力度满足f
i
后,以图像形式存下当前状态下电子皮肤的每个传感单元f
i,j
(t
k
)的值;对选定的具体材质重复多次探索,保存符合力度的n个样本,对力度均进行样本收集,每一种力度均收集n个样本,每一个样本都以灰度图像的形式存储;对每组不同结构的样本均进行数据收集,组成样本数据集其中代表在力度为f
i
情况下的第n个样本。
[0021]
作为一种可能的实施方式,进一步的,所述将样本数据集输入网络模型进行训练步骤具体包括:
[0022]
s21、将所述样本数据库中的其中3种力度的数据集a1,a2,a3设置为训练数据集,另一种力度a4设置为测试数据集,用于验证算法的泛化性能;将训练数据集中的一个训练样本输入至网络进行训练;
[0023]
s22、训练样本通过1个卷积层后,再经过1个最大池化处理,得到输出特征f
a
,总通道数扩大,尺寸变小;
[0024]
s23、将输出特征f
a
进行处理,将其输入到1个残差块,进一步提取特征,得到f
b
;
[0025]
s24、将输出特征f
b
进行处理,先输入网络模型的注意力机制模块中,注意力机制
模块将自动学习特征通道的注意力权重w
a
,把权重分配给输出特征f
b
得到注意力图m
a
,网络模型包括残差网络结构,将步输出特征f
a
绕过残差块以及注意力机制模块也作为下一层网络的输入;
[0026]
s25、继续将输出特征输入到3个残差块以3个及注意力机制模块中,对卷积层输出的特征图的不同通道和区域进行调整;
[0027]
s26、输出特征图在通过最后的残差块和注意力机制模块之后得到f
out
,连接到输出层,增加一个focal loss损失函数得到输入图像的预测置信度;
[0028]
s27、将训练数据集中的所有数据样本重复s21
‑
s26的步骤进行训练,并依据损失调整图像分类模型中的权重;
[0029]
s28、对训练完成的网络模型进行识别准确率验证,训练过程未使用到的触觉数据集进行测试。加载训练好的最优模型,对数据集a4中的所有样本进行测试,验证模型的泛化效果。
[0030]
作为一种可能的实施方式,进一步的,
[0031]
所述步骤s21输入到网络中的图像样本的尺寸限制为44
×
44,以灰度图像的形式呈现;
[0032]
所述步骤s22的卷积层为1个3
×3×
64的卷积层,其中,3
×
3表示卷积核尺寸,64表示卷积核的个数;再经过池化层处理后,总通道扩大为64,尺寸减小为原先的1/2;
[0033]
所述步骤s23的残差块包括64个1
×
1卷积块、64个3
×
3卷积块以及64个1
×
1卷积块;其中,第1个1
×
1卷积块用来调节通道数,第2个3
×
3卷积块提取特征,第3个卷积块1
×
1进行升维,不同通道的像素点进行线性组合,进行非线性化操作,完成升维、降维功能,减少了参数;
[0034]
所述步骤s25所述其余残差块的卷积核个数分别为128、256、512。
[0035]
作为一种可能的实施方式,进一步的,所述步骤s24的注意力机制模块包括1个全局平均池化层、2个全连接层和激活函数sigmoid,注意力机制模块用于为更关键的特征信息分配更高的权重,避免无关信息的干扰;其中注意力图m
a
的表达式为:m
a
=w
a
*σ*f
b
,其中,σ表示sigmoid函数。
[0036]
作为一种可能的实施方式,进一步的,所述步骤s26的focal loss损失函数用于计算触觉图像分类模型的损失,模型的输出y={y1,y2,y3,
…
,y
n
},平衡因子a={α1,α2,α3,
…
,α
n
},集中参数β=2。n个材料类别的focal loss损失表示为:
[0037][0038]
其中,n表示触觉数据类别标签。
[0039]
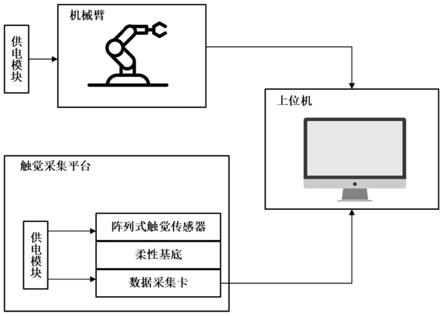
一种基于机器人的触觉数据快速获取装置,其包括:
[0040]
机械臂,采用六自由度机械臂,用于控制装置的移动;
[0041]
触觉采集平台,安装于机械臂活动端,其包括阵列式触觉传感器、数据采集卡和柔性基底,所述柔性基底贴附于阵列式触觉传感器表面,所述数据采集卡与阵列式触觉传感器信号连接获取其输出的数据;
[0042]
上位机,与机械臂和所述数据采集卡信号连接,用于接收机械臂和数据采集卡的信号,并控制机械臂工作;
[0043]
供电模块,用于为机械臂工作以及触觉传感器提供工作电源;
[0044]
其中,所述上位机控制六自由度机械臂移动,接触到待分析样本后,触觉传感器产生触感,并利用数据采集卡向上位机反馈触觉数据,上位机根据触觉数据进行处理并保存。
[0045]
本发明采用以上技术方案,具有以下有益效果:本发明提出了一种机械臂结合阵列式触觉传感器快速收集触觉数据的方案,通过机械臂快速按压收集触觉数据,每一次数据采集使用不同位姿下的机械臂,采用不同按压力度进行收集,能有效包括触摸时的不同接触状态。这种采样模式更加适应机器人操作的实际需求。另外,本发明还针对采集到的触觉数据,提出了一种增加注意力机制的残差网络的深度学习训练办法,这种方法具有端到端的特点,不需要对触觉数据进行预处理,设计手工特征,以原始数据输入,输出最终结果。注意力机制可以模拟人手对触感的聚焦效应。对重要信息进行筛选,关注触觉图像上的重要数据片段,为其分配更大的权重,得到更加精确的识别结果。利用不同力度,不同位姿的数据集训练这种增加注意力机制的残差网络,使得训练出来的模型泛化能力更强。在测试方式上,提出利用训练3种力度触觉数据集得到的训练模型去预测另一种力度触觉数据的预测方式,符合真实世界的操作方式。
附图说明
[0046]
下面结合附图与具体实施方式对本发明做进一步详细的说明:
[0047]
图1为本发明基于机器人的触觉数据快速获取装置的示意简图;
[0048]
图2为本发明实物操作流程界面示意图;
[0049]
图3为本发明实施例整体流程示意简图;
[0050]
图4为本发明实施例的材质数据集构建流程示意简图;
[0051]
图5为本发明采样的多类材质图像示意图。
具体实施方式
[0052]
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述。
[0053]
如图1
‑
5所示,本发明提供了一种基于机器人的触觉数据感知分析方法,所述机器人为接触端设有传感器的机械臂,所述基于机器人触觉的鲁棒感知分析方法包括如下步骤:
[0054]
构建材质样本数据库;具体包括:
[0055]
s11、选取a组不同结构的样本;
[0056]
s12、控制机械臂与样本接触并反馈触觉信息确定预设力度大小;
[0057]
s13、控制机械臂分别与a组不同结构的样本依次接触,当接触力度达到预设力度大小后,以图像形式存下当前状态下传感器的反馈触觉信息进行样本收集。
[0058]
作为一种可能的实施方式,进一步的,所述步骤s11中的样本结构均为柔性材质的第一物件包裹第二物件构成。
[0059]
作为一种可能的实施方式,进一步的,所述步骤s12具体为:
[0060]
开启python脚本进行数据采集,首先进行机械臂、传感器的初始化动作,接着机械臂移动到初始设定位姿p
i
(x,y,z,r
x
,r
y
,r
z
),在y方向以v=1mm/s的速度进行推进,直到机
械臂上的传感器接触到材料,开始向上位机反馈触觉信息确定预设力度,阵列式触觉传感器体现的预设力度大小f(t
k
)是所有传感点力值之和,表达式如(1)所示:
[0061][0062]
其中,f
i,j
(t
k
)是在时刻t
k
在i行j列传感单元体现的力值,n,m代表触觉传感器的行和列。
[0063]
作为一种可能的实施方式,进一步的,所述步骤s13具体为:取a组不同结构的样本中的一组,利用带有触觉传感器的机械臂执行探索动作,设开始探索动作前机械臂位姿为p
b
;首先,改变机械臂的关节转角控制参数θ(θ1,θ2,θ3,θ4,θ5,θ6)中的θ5和θ6,两个参数相对初始关节转角的改变量分别是δθ5∈(
‑5°
,5
°
)中的随机数,δθ6∈(
‑
45
°
,45
°
)中的随机数,改变后的参数值记θ
i
;其次,改变机械臂末端执行器位姿表示p(x,y,z,r
x
,r
y
,r
z
)的z参数,z参数相对机械臂末端执行器位姿的改变量是δz∈(
‑
5cm,5cm)中的随机数,改变后的参数值记p
i
。每一次执行动作t
i
∈(θ
i
,p
i
),上位机判断该次探索力度满足f
i
后,以图像形式存下当前状态下电子皮肤的每个传感单元f
i,j
(t
k
)的值;对选定的具体材质重复多次探索,保存符合力度的n个样本,对力度均进行样本收集,每一种力度均收集n个样本,每一个样本都以灰度图像的形式存储;对每组不同结构的样本均进行数据收集,组成样本数据集其中代表在力度为f
i
情况下的第n个样本。
[0064]
选取预设的具有注意力机制模块的网络模型;
[0065]
将样本数据集输入网络模型进行训练并验证;具体包括:
[0066]
s21、将所述样本数据库中的其中3种力度的数据集a1,a2,a3设置为训练数据集,另一种力度a4设置为测试数据集,用于验证算法的泛化性能;将训练数据集中的一个训练样本输入至网络进行训练;
[0067]
s22、训练样本通过1个卷积层后,再经过1个最大池化处理,得到输出特征f
a
,总通道数扩大,尺寸变小;
[0068]
s23、将输出特征f
a
进行处理,将其输入到1个残差块,进一步提取特征,得到f
b
;
[0069]
s24、将输出特征f
b
进行处理,先输入网络模型的注意力机制模块中,注意力机制模块将自动学习特征通道的注意力权重w
a
,把权重分配给输出特征f
b
得到注意力图m
a
,网络模型包括残差网络结构,将步输出特征f
a
绕过残差块以及注意力机制模块也作为下一层网络的输入;
[0070]
s25、继续将输出特征输入到3个残差块以3个及注意力机制模块中,对卷积层输出的特征图的不同通道和区域进行调整;
[0071]
s26、输出特征图在通过最后的残差块和注意力机制模块之后得到f
out
,连接到输出层,增加一个focal loss损失函数得到输入图像的预测置信度;
[0072]
s27、将训练数据集中的所有数据样本重复s21
‑
s26的步骤进行训练,并依据损失调整图像分类模型中的权重;
[0073]
s28、对训练完成的网络模型进行识别准确率验证,训练过程未使用到的触觉数据
集进行测试。加载训练好的最优模型,对数据集a4中的所有样本进行测试,验证模型的泛化效果。
[0074]
作为一种可能的实施方式,进一步的,
[0075]
所述步骤s21输入到网络中的图像样本的尺寸限制为44
×
44,以灰度图像的形式呈现;
[0076]
所述步骤s22的卷积层为1个3
×3×
64的卷积层,其中,3
×
3表示卷积核尺寸,64表示卷积核的个数;再经过池化层处理后,总通道扩大为64,尺寸减小为原先的1/2;
[0077]
所述步骤s23的残差块包括64个1
×
1卷积块、64个3
×
3卷积块以及64个1
×
1卷积块;其中,第1个1
×
1卷积块用来调节通道数,第2个3
×
3卷积块提取特征,第3个卷积块1
×
1进行升维,不同通道的像素点进行线性组合,进行非线性化操作,完成升维、降维功能,减少了参数;
[0078]
所述步骤s25所述其余残差块的卷积核个数分别为128、256、512。
[0079]
作为一种可能的实施方式,进一步的,所述步骤s24的注意力机制模块包括1个全局平均池化层、2个全连接层和激活函数sigmoid,注意力机制模块用于为更关键的特征信息分配更高的权重,避免无关信息的干扰;其中注意力图m
a
的表达式为:m
a
=w
a
*σ*f
b
,其中,σ表示sigmoid函数。
[0080]
作为一种可能的实施方式,进一步的,所述步骤s26的focal loss损失函数用于计算触觉图像分类模型的损失,模型的输出y={y1,y2,y3,
…
,y
n
},平衡因子a={α1,α2,α3,
…
,α
n
},集中参数β=2。n个材料类别的focal loss损失表示为:
[0081][0082]
其中,n表示触觉数据类别标签。
[0083]
将机械臂的传感器触觉数据输入训练完成的网络模型输出分析结果。
[0084]
一种基于机器人的触觉数据快速获取装置,其包括:
[0085]
机械臂,采用六自由度机械臂,用于控制装置的移动;
[0086]
触觉采集平台,安装于机械臂活动端,其包括阵列式触觉传感器、数据采集卡和柔性基底,所述柔性基底贴附于阵列式触觉传感器表面,所述数据采集卡与阵列式触觉传感器信号连接获取其输出的数据;
[0087]
上位机,与机械臂和所述数据采集卡信号连接,用于接收机械臂和数据采集卡的信号,并控制机械臂工作;
[0088]
供电模块,用于为机械臂工作以及触觉传感器提供工作电源;
[0089]
其中,所述上位机控制六自由度机械臂移动,接触到待分析样本后,触觉传感器产生触感,并利用数据采集卡向上位机反馈触觉数据,上位机根据触觉数据进行处理并保存。
[0090]
实施例:
[0091]
本发明提出一种基于机器人触觉的鲁棒感知的快速数据获取装置,组成示意图如图1。包括六自由度机械臂、高分辨率阵列式触觉传感器、数据采集卡、传感器安装装置和上位机。其中传感器安装装置由机加工制成,表面贴附两层柔性基底以增强传感器触感,传感器贴附在柔性基底表面,数据采集卡安装传感器安装装置中间,并将触觉传感器与数据采集卡进行连接。整个装配好的传感器安装装置安装在六自由度机械臂上,同时,六自由度机
械臂与数据采集卡都连接到上位机。上位机控制六自由度机械臂移动,接触到待分析样本后,触觉传感器产生触感,并向上位机反馈触觉数据,上位机会根据触觉数据进行处理并保存。
[0092]
所述六自由度机械臂用于搭载载触觉传感器进行移动,实现类人手操作方式的靠近材质并按压材质。本实例六自由度机械臂采用丹麦ur5机械臂。
[0093]
所述高分辨率阵列式传感器用于与材质交互时产生触觉图像,本实例中的触觉传感器模块选用美国tekscan 5076阵列式触觉传感器,它的分辨率达到44*44。
[0094]
所述传感器安装装置依据触觉传感器尺寸及数据采集卡尺寸,使用solidworks软件设计,由机加工方式进行加工。
[0095]
所述供电模块为机械臂以及数据采集卡进行供电。本实例为机械臂供电采用220v电源进行供电。对数据采集卡供电可采用普通计算机进行,本实例采用联想笔记本电脑刃9000。
[0096]
所述上位机用于对接收到的触觉传感器数据进行数据处理与存储,本实例采用的计算机为联想笔记本电脑刃9000。
[0097]
本发明提出了一种基于机器人触觉的鲁棒感知的分析方法,整体流程如图2所示,包括以下步骤:
[0098]
1)材质数据集构建,采集流程如图3所示具体步骤如下:
[0099]1‑
1)选取a根形状相同木棍,再选取a类具有不同纹理且有代表性的布料对木棍进行包覆。举例来说,包覆的布料材质可以是毛巾、绒布、牛仔布、麻布、海绵等具体物品。
[0100]1‑
2)开启python脚本进行数据采集。首先进行机械臂(本实例使用ur5机械臂)、传感器(本实例使用tekscan 5076触觉传感器)的初始化动作。接着机械臂移动到初始设定位姿p
i
(x,y,z,r
x
,r
y
,r
z
),在y方向以v=1mm/s的速度进行推进,直到传感器接触到材料,开始向上位机反馈触觉信息。阵列式触觉传感器体现的力度大小f(t
k
)是所有传感点力值之和,表达式如(1)所示:
[0101][0102]
其中,f
i,j
(t
k
)是在时刻t
k
在i行j列传感单元体现的力值,n,m代表触觉传感器的行和列。
[0103]1‑
3)取1
‑
1)中的a类材质中的一种,利用带有触觉传感器的机械臂执行探索动作,设开始探索动作前机械臂位姿为p
b
。首先,改变机械臂的关节转角控制参数θ(θ1,θ2,θ3,θ4,θ5,θ6)中的θ5和θ6,两个参数相对初始关节转角的改变量分别是δθ5∈(
‑5°
,5
°
)中的随机数,δθ6∈(
‑
45
°
,45
°
)中的随机数,改变后的参数值记θ
i
。其次,改变机械臂末端执行器位姿表示p(x,y,z,r
x
,r
y
,r
z
)的z参数,z参数相对机械臂末端执行器位姿的改变量是δz∈(
‑
5cm,5cm)中的随机数,改变后的参数值记p
i
。每一次执行动作t
i
∈(θ
i
,p
i
),上位机判断该次探索力度满足f
i
后,以图像形式存下当前状态下电子皮肤的每个传感单元f
i,j
(t
k
)的值,保存的六类材质图像如图4所示。
[0104]1‑
4)重复1
‑
3),对步骤1
‑
3)选定的具体材质重复多次探索,保存符合力度f
i
的n个
样本。对力度f
i
∈{2n,5n,7n,10n}均进行样本收集,每一种力度均收集n个样本。
[0105]1‑
5)重复步骤1
‑
3)至步骤1
‑
4),对步骤1
‑
1)确定的a类材质均进行数据收集,组成样本数据集其中代表在力度为f
i
情况下的第n个样本。
[0106]
2)使用增加注意力机制的残差网络训练数据:
[0107]
s1:将步骤1)构建的材质数据库中的其中3种力度的数据集a1,a2,a3设置为训练数据集,另一种力度a4设置为测试数据集,这样的开集设置方式可以验证算法的泛化性能。将一个训练样本输入至网络进行训练。训练样本不需要进行数据预处理,因此输入形式为f(t
k
)。
[0108]
s2:图像通过1个卷积层后,再经过1个最大池化处理,得到输出特征f
a
,总通道数扩大,尺寸变小;
[0109]
s3:将步骤s2中得到的输出特征f
a
进行处理,将其输入到1个残差块,进一步提取特征,得到f
b
;
[0110]
s4:将步骤s3中得到的输出特征f
b
进行处理,先输入到注意力机制模块中,注意力机制模块将自动学习特征通道的注意力权重w
a
,把权重分配给由步骤s3中得到的输出特征f
b
得到注意力图m
a
。模型包括残差网络结构,需要将步骤s2得到的输出特征f
a
绕过残差块以及注意力机制模块也作为下一层网络的输入。
[0111]
s5:继续将输出特征图输入到3个残差块以3个及注意力机制模块中。对卷积层输出的特征图的不同通道和区域进行调整。
[0112]
s6:输出特征图在通过最后的残差块和注意力机制模块之后得到f
out
,连接到输出层,最后增加一个focal loss损失函数得到输入图像的预测置信度。
[0113]
s7:将训练数据集中的所有数据样本重复s2
‑
s6的步骤进行训练,并依据损失调整图像分类模型中的权重。
[0114]
进一步的,步骤s1输入到网络中的图像样本的尺寸限制为44
×
44,以灰度图像的形式呈现。
[0115]
进一步的,步骤s2所述卷积层为1个3
×3×
64的卷积层,3
×
3表示卷积核尺寸,64表示卷积核的个数。再经过池化层处理后,总通道扩大为64,尺寸减小为原先的1/2。
[0116]
进一步的,步骤s3所述残差块包括64个1
×
1卷积块、64个3
×
3卷积块以及64个1
×
1卷积块。第1个1
×
1卷积块用来调节通道数,第2个3
×
3卷积块提取特征,第3个卷积块1
×
1进行升维。不同通道的像素点进行线性组合,然后进行非线性化操作,完成升维、降维功能,减少了参数。
[0117]
进一步的,步骤s4所述的注意力机制模块使用1个全局平均池化、2个全连接层和激活函数sigmoid进行实现。注意力机制模块为更关键的特征信息分配更高的权重,避免无关信息的干扰。注意力图m
a
的表达式如下:
[0118]
m
a
=w
a
*σ*f
b
[0119]
其中,σ表示sigmoid函数。
[0120]
进一步的,步骤s5所述其余残差块的卷积核个数分别为128、256、512。其余注意力机制模块同样是1个全局平均池化、2个全连接层和激活函数sigmoid的形式。
[0121]
进一步的,步骤s6使用的focal loss损失函数计算触觉图像分类模型的损失。模
型的输出y={y1,y2,y3,
…
,y
n
},平衡因子a={α1,α2,α3,
…
,α
n
},集中参数β=2。n个材料类别的focal loss损失表示为:
[0122][0123]
其中,n表示触觉数据类别标签。
[0124]
进一步的,重复对所有训练数据进行20次的训练,并将识别准确率最好的模型保存下来。
[0125]
3)跨力度数据集验证识别准确率。
[0126]
对步骤2)训练过程未使用到的触觉数据集进行测试。加载训练好的最优模型,对数据集a4中的所有样本进行测试,验证模型的泛化效果。
[0127]
具体实物操作流程可以为如下方式:
[0128]
如图2所示:提供了利用材质识别应用界面实现带触觉传感器的机械臂触摸并识别一个实际样本的方案。
[0129]
1.选取包覆麻布的木棍作为识别样品,使用老虎台将其固定。
[0130]
2.点击机械臂初始位姿按钮,控制机械臂移动到初始设定位姿p
i
(x,y,z,r
x
,r
y
,r
z
),可调控速度条改变移速接近并按压材质。
[0131]
3.点击第一个微调按钮可改变机械臂的关节转角控制参数θ(θ1,θ2,θ3,θ4,θ5,θ6)中的θ5和θ6,两个参数相对初始关节转角的改变量分别是δθ5∈(
‑5°
,5
°
)中的随机数,δθ6∈(
‑
45
°
,45
°
)中的随机数。点击第二个微调按钮可改变机械臂末端执行器位姿表示p(x,y,z,r
x
,r
y
,r
z
)的z参数,z参数相对机械臂末端执行器位姿的改变量是δz∈(
‑
5cm,5cm)中的随机数。保证触摸材质的过程是随机的。
[0132]
4.点击开始摸材料按钮,触觉传感器将记录下当前的触觉数据,以灰度图的形式保存在上位机。
[0133]
5.点击开始识别按钮会在上位机上加载训练好的分类模型,并读取保存好的数据,
[0134]
6.得到识别结果并显示在右下角。
[0135]
测试例:
[0136]
为了证明利用上述实验设置采集到的实验样本在提出的识别算法下具有高泛化能力,进行如下分析:
[0137]
1.实验设计,使用自建4种不同力度的数据库进行实验,力度为f
i
∈{2n,5n,7n,10n},实验时使用其中3类触觉数据库进行训练,另一类触觉数据库进行测试,得到预测效果。同时采用其他模型训练数据集进行效果对比。使用的其他模型包括mlp、cnn、vision transformer、resnet。
[0138]
2.结果展示,进行上述实验设计得到的结果展示如下:
[0139] 2_5_10n训练准确率7n测试准确率mlp0.9202
±
0.00030.9200cnn0.9528
±
0.00020.8783vision transformer0.9417
±
0.00030.8556
resnet0.9087
±
0.01160.9167senet resnet0.8043
±
0.03250.9417
[0140] 2_7_10n训练准确率5n测试准确率mlp0.9389
±
0.00050.9328cnn0.9460
±
0.00040.9461vision transformer0.9400
±
0.00010.9194resnet0.8811
±
0.00740.9733senet resnet0.8826
±
0.01110.9767
[0141] 2_5_7n训练准确率10n测试准确率mlp0.9446
±
0.00060.7650cnn0.9676
±
0.00010.7722vision transformer0.9444
±
0.00020.4728resnet0.8965
±
0.00500.8344senet resnet0.8917
±
0.01710.9217
[0142][0143][0144]
从以上表格的结果可以看出,加上注意力机制的残差网络与其他算法相比,在同样的训练环境下,加上注意力机制的残差网络的识别表现几乎都更加好。除了在使用5、7、10n的数据库去训练,2n的数据去测试时的识别准确率略低于单纯的resnet以及vision transformer。我们猜想,是因为2n的触觉数据在采集时按压力过小,导致触觉特征不够突出导致的。总体来讲,此次工作提出的模型具有良好的泛化能力。
[0145]
以上所述为本发明的实施例,对于本领域的普通技术人员而言,根据本发明的教导,在不脱离本发明的原理和精神的情况下凡依本发明申请专利范围所做的均等变化、修改、替换和变型,皆应属本发明的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。