技术特征:
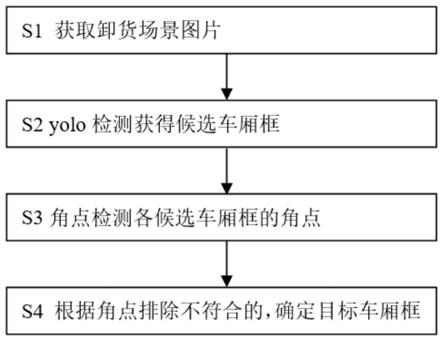
1.一种确定目标车辆车厢的方法,其特征在于,包括以下步骤:s1、获取包括目标车辆车厢在内的卸货图片;s2、使用yolo模型检测步骤s1中采集的图片,检测出并用方框圈出其中全部的候选车厢框;s3、采用harris角点检测方法检测出步骤s2中各个候选车厢框内是否存在角点;s4、根据步骤s3中角点情况排除不符合条件的候选车厢框,最后确定目标车厢框。2.根据权利要求1所述的一种确定目标车辆车厢的方法,其特征在于,步骤s3的角点检测方法,主要步骤如下:1)对于每个候选车厢框区域,视该区域内的全部像素点构成一张图像i,图像i(x,y)表示在(x,y)点的像素信息;2)建立一个窗口,以当前窗口为中心向各个方向进行偏移;3)窗口在点(x,y)处移动(δx,δy)后计算到的所有差异总和记为c:其中,window(x,y)是以x,y为中心的窗口;w(u,v)是一个加权值,是常数值或高斯加权函数;4)对图像i(x,y)在移动(δx,δy)处进行泰勒一阶展开,得到:i(u δx,v δy)=i(u,v) i
x
(u,v)δx i
y
(u,v)δy o(δx2,δy2)
ꢀꢀꢀ
(2)其中,ix和iy为分别对x和y的偏导数,式子o(δx2,δy2)忽略不计;5)结合公式(1)和公式(2),得到公式(3),如下:6)使用矩阵表示公式(3),并得到矩阵的特征值λ1和λ2,并根据该两个特征值的大小来判断待测车厢框区域是否存在角点。3.根据权利要求2所述的一种确定目标车辆车厢的方法,其特征在于,步骤6)中,使用矩阵表示公式(3),具体如下:其中:4.根据权利要求3所述的一种确定目标车辆车厢的方法,其特征在于,矩阵m为实对称矩阵,λ1和λ2分别为矩阵m的最大特征值和最小特征值。5.根据权利要求4所述的一种确定目标车辆车厢的方法,其特征在于,步骤6)中,采用角点函数来判断角点是否存在,该角点函数如下:r=det(m)
‑
k(trace(m))2其中,det(m)=λ1λ2;trace(m)=λ1 λ2;k值取0.04~0.06。6.根据权利要求5所述的一种确定目标车辆车厢的方法,其特征在于,采用角点函数判
定图片区域角点时的评价过程如下:当λ1小于l1,λ2小于l2时,r小于q1,此区域平坦;当λ1远大于λ2时,r小于0,此区域为边缘;当λ1大于l3,λ2大于l4时,r大于q2,判断为角点;其中,l1、l2、l3、l4、q1和q2为实际生产中设定的参照值。7.根据权利要求1
‑
6中任一项所述的一种确定目标车辆车厢的方法,其特征在于,步骤s4中,排除全部少于2个角点的候选车厢框,继而确定剩下的即为目标车厢框。8.根据权利要求7所述的一种确定目标车辆车厢的方法,其特征在于,步骤s2中,首先训练yolo识别车厢的模型,再使用训练好的模型来检测步骤s1中所得的目标图片,并在目标图片的卸货场景中标出全部车辆车厢的范围,作为候选的车厢框。
技术总结
本发明公开了一种确定目标车辆车厢的方法,属于图像识别技术领域。本发明的方法包括以下步骤:S1、获取料场内目标车辆车厢在内的卸货场景图片;S2、使用yolo模型检测步骤S1中所得的图片,获得其中全部的候选车厢框;S3、采用角点检测方法检测出步骤S2中各个候选车厢框是否存在角点;S4、根据步骤S3中角点情况排除不符合条件的候选车厢框,最后确定目标车厢框。采用本发明的技术方案能够有效解决现有人工对进厂的废钢进行评估,因受人为因素影响,判定准确性低的问题,且该方法能够快速识别场地中的目标车厢上的优质废钢,有利于提高质检的准确性及到场卸货效率。的准确性及到场卸货效率。的准确性及到场卸货效率。
技术研发人员:李勇 解鹏 孙前进 张磊 李军 袁成钢 潘家勤 王凯 谢义 方木云 徐林 王仁伟 孙军欢
受保护的技术使用者:欧冶链金再生资源有限公司
技术研发日:2021.09.15
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。