技术特征:
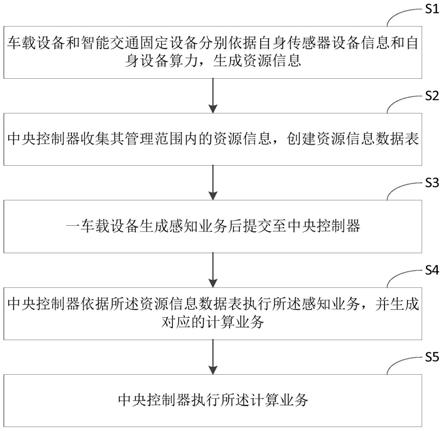
1.一种车联网超视距感知任务的异构资源联合管理方法,其特征在于,包括以下步骤:车载设备和智能交通固定设备分别依据自身传感器设备信息和自身设备算力,生成资源信息;中央控制器收集其管理范围内的资源信息,创建资源信息数据表;一车载设备生成感知业务后提交至中央控制器;中央控制器依据所述资源信息数据表获取所述感知业务所需的感知信息;中央控制器依据获取的感知信息生成所述感知业务对应的计算业务;中央控制器执行所述计算业务。2.如权利要求1所述的一种车联网超视距感知任务的异构资源联合管理方法,其特征在于,所述中央控制器收集其管理范围内的资源信息,包括:车载设备驶入任一中央控制器的管理范围内之后,将自身的资源信息上传至所述任一中央控制器。3.如权利要求2所述的一种车联网超视距感知任务的异构资源联合管理方法,其特征在于,所述方法还包括:车载设备驶出任一中央控制器的管理范围内之后,清除其在所述任一中央控制器的管理范围内的资源信息;中央控制器依据预设的延迟窗删除所述资源信息数据表中过期的资源信息。4.如权利要求1所述的一种车联网超视距感知任务的异构资源联合管理方法,其特征在于,车载设备对应的资源信息包括传感器类型、感知精度、感知范围、行驶线路信息以及设备计算能力;智能交通固定设备的资源信息包括传感器类型、感知精度、感知范围以及设备计算能力;所述感知业务包括感知区域信息、需求传感器信息以及感知时间信息;其中,所述感知时间信息包括感知时间和处理感知业务的最大时延;所述感知区域信息包括地理位置以及感知范围;所述计算业务包括计算任务所需数据、计算复杂度以及处理计算业务的最大时延。5.如权利要求4所述的一种车联网超视距感知任务的异构资源联合管理方法,其特征在于,所述中央控制器依据所述资源信息数据表获取所述感知业务所需的感知信息;包括:中央控制器依据感知业务中所述的感知时间以及地理位置,从所述资源信息数据表中确定第一目标设备;依据感知业务中所述的感知范围以及需求传感器信息,从第一目标设备中筛选出符合要求的第二目标设备;中央控制器获取所述第二目标设备的传感器所采集的感知信息;所述中央控制器依据获取的感知信息生成所述感知业务对应的计算业务,包括:依据所述第二目标设备的感知信息以及所述感知时间信息中所述的最大时延,生成对应的计算业务。6.如权利要求1所述的一种车联网超视距感知任务的异构资源联合管理方法,其特征在于,所述中央控制器执行所述计算业务,包括:中央控制器依据当前资源信息数据表判断所述计算业务的可执行性;若不可执行,则通知所述一车载设备对所述感知业务进行调整或者使用激励机制调度
其他车载设备完成所述计算业务;若可执行,则所述中央控制器执行所述计算业务并更新资源信息至所述资源信息数据表。7.一种车联网超视距感知任务的异构资源联合管理系统,其特征在于,所述系统包括中央控制器、车载设备以及智能交通固定设备;所述车载设备以及智能交通固定设备分别与所述中央控制器通信连接;所述车载设备,用于依据自身传感器设备信息和自身设备算力,生成资源信息;以及生成感知业务后提交至中央控制器;所述智能交通固定设备,用于依据自身传感器设备信息和自身设备算力,生成资源信息;所述中央控制器,用于收集其管理范围内的资源信息,创建资源信息数据表;以及依据所述资源信息数据表获取所述感知业务所需的感知信息;以及依据获取的感知信息生成所述感知业务对应的计算业务;以及执行所述计算业务。8.如权利要求7所述的车联网超视距感知任务的异构资源联合管理系统,其特征在于,所述车载设备生成的资源信息包括传感器类型、感知精度、感知范围、行驶线路信息以及设备计算能力;所述智能交通固定设备生成的资源信息包括传感器类型、感知精度、感知范围以及设备计算能力;所述感知业务包括感知区域信息、需求传感器信息以及感知时间信息;其中,所述感知时间信息包括感知时间和处理感知业务的最大时延;所述感知区域信息包括地理位置以及感知范围;所述中央控制器生成的计算业务包括计算任务所需数据、计算复杂度以及处理计算业务的最大时延。9.如权利要求7所述的车联网超视距感知任务的异构资源联合管理系统,其特征在于,所述中央控制器包括:第一获取单元,用于依据感知业务中所述的感知时间以及地理位置,从所述资源信息数据表中确定第一目标设备;第二获取单元,用于依据感知业务中所述的感知范围以及需求传感器信息,从第一目标设备中筛选出符合要求的第二目标设备;第三获取单元,用于获取所述第二目标设备的传感器所采集的感知信息;生成单元,用于依据所述第二目标设备的感知信息以及所述感知时间信息中所述的最大时延,生成对应的计算业务。10.如权利要求9所述的车联网超视距感知任务的异构资源联合管理系统,其特征在于,所述中央控制器还包括:判断单元,用于依据自身资源判断所述计算业务的可执行性;反馈单元,用于在判断单元输出的结果为不可执行时,通知所述一车载设备对所述感知业务进行调整或者使用激励机制调度其他车载设备完成所述计算业务;执行单元,用于在判断单元输出的结果为可执行时,执行所述计算业务。
技术总结
本发明提供车联网超视距感知任务的异构资源联合管理方法与系统,方法包括车载设备和智能交通固定设备,车载设备和智能交通固定设备分别依据自身传感器设备信息和自身设备算力,生成资源信息;中央控制器收集其管理范围内的资源信息,创建资源信息数据表;一车载设备生成感知业务后提交至中央控制器;中央控制器依据所述资源信息数据表获取所述感知业务所需的感知信息;中央控制器依据获取的感知信息生成所述感知业务对应的计算业务。本发明利用中央控制器对异构资源的联合管理,使得车辆之间、车辆和智能交通设施之间可以交互共享安全告警和道路状况等关键信息,确保为业务提供有效的服务,提高道路交通的效率和安全性。提高道路交通的效率和安全性。提高道路交通的效率和安全性。
技术研发人员:黄联芬 陈方哲 高志斌 李王明卉 刘漳 刘榜 杨泽靖
受保护的技术使用者:厦门大学
技术研发日:2021.08.16
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。