1.本发明涉及智能农机技术领域,具体为一种智能农机自动出入机库方法。
背景技术:
2.目前农业劳动力人口不足是中国农业面临的紧迫性问题,使用农业机械作业替代人力作业是最直接解决劳动力不足的方案。其中最理想的形式是无人农场,即利用无人驾驶的农机自动完成土地耕整、播种、田间管理和收获(耕种管收)。但这种形式尚处在高校科研阶段,而且就国内农业机械化现状来看,无人农场距离广泛的应用落地还有很长的路要走。现阶段更落地的方案是农机自身的智能化改造、创新,实现农机在田间作业的无人化,这是目前智能农机发展的主流趋势。但要未来要实现无人农场,除实现农机在田间作业的无人化,还需要研究探索农机的自动出入机库技术。
3.目前的智能农机在进行智能导航移动时,室外一般采用gps导航,但进入室内后,gps定位信号衰减严重,无法准确定位,从而导致智能农机在室内无法做到准确移动和落位;有一些采用超声波、蓝牙等室内定位技术,调试装配麻烦,易受干扰误差大,不具备快速高效的室内外定位切换的能力,只能在单一的定位场景进行定位,那么在农机多次往返出入室内外时就会出现过多的信号误差,导致农机最终的导航定位移动非常不理想,无法做到让农机在入库和出库这两个关键移动过程中保持连续高精度的定位信号获取,从而进行精确定位导航,自动化和智能化程度太低;那么如何做到让智能农机既能在室内准确导航,又能在反复出入机库时,能够快速准确的切换定位方式,保持一种连续高效稳定的定位信号准确获取,是我们改进的问题。
技术实现要素:
4.本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。为了实现根据本发明的这些目的和其它优点,提供了一种智能农机自动出入机库方法,包括:步骤一、在机库内部设置一个由多个uwb定位基站ⅰ组成的全信号覆盖区;步骤二、在机库门口设置一个由多个uwb定位基站ⅱ组成的交叉信号方阵;步骤三、进行uwb基站的连接部署及标定、机库门的智能化部署;步骤四、构建一个由所述全信号覆盖区、交叉信号方阵、机库外部的北斗信号区所组成的,用于统一定位的局部地图坐标系;步骤五、构建栅格地图;将所述局部地图坐标系转化为像素坐标系;对机库内部的多个库位和机库外部的多个地块进行绘制;步骤六、智能农机开始基于所述栅格地图进行导航,完成出库和入库的移动作业。
5.优选的是,其中,所述步骤一中,所述全信号覆盖区的配置方法为:单个所述uwb定位基站ⅰ的信号覆盖半径为l,根据实际部署机库的长宽为m*n,在机库内部间隔安装(m/l)*(n/l)个uwb定位基站ⅰ,从而构成了所述全信号覆盖区。
6.优选的是,其中,所述步骤二中,所述交叉信号方阵的配置方法为:单个所述uwb定位基站ⅱ的信号覆盖半径为l,将多个所述uwb定位基站ⅱ的其中两个分别设置于距所述机
库门口左右l/2处,另外两个在同一平面上平行间隔设置于机库外部的道路上,形成矩阵;从而构成了所述交叉信号方阵。
7.优选的是,其中,所述步骤三包括,
8.步骤s31、所述uwb基站的连接部署及标定方法为:选择机库内部左下角的uwb定位基站ⅰ为基准基站并以此为坐标系原点,以水平方向为x轴,垂直方向为y轴,逐一标定各个基站ⅰ、基站ⅱ与所述基准基站的位置关系,标定完成后将标定数据写入智能农机上的uwb车载主动定位模块;uwb车载主动定位模块接收基站定位信号解算出定位数据并将其推送到主控机,供主控机定位导航使用;所述机库内部设置有同步控制器;每个所述uwb定位基站ⅰ和uwb定位基站ⅱ之间都使用网线或光纤采用级联方式进行连接,最后连接至所述同步控制器;
9.步骤s32、所述机库门的智能化部署方法为:机库门口配置有电控化卷帘门;所述电控化卷帘门上设置有三个触发性的控制接口和门端无线控制模块;三个所述控制接口分别被配置为用于控制所述电控化卷帘门的开、关、暂停;所述门端无线控制模块上设置有三个继电器;三个所述继电器分别与三个所述控制接口相连接;所述智能农机上设置有车端无线控制模块;所述智能农机的主控机通过rs232方式与所述车端无线控制模块通信;所述车端无线控制模块通过无线方式与所述门端无线控制模块通信,从而控制所述电控化卷帘门的开闭;所述门端无线控制模块上设置有红外对射传感器;所述电控化卷帘门高度设为h,所述红外对射传感器安装在0.8*h位置处,当收到读取电控化卷帘门状态的指令时,通过内部传感器检测电控化卷帘门的开闭状态并最终返回给主控机。
10.优选的是,其中,所述步骤四包括,
11.步骤s41、所述全信号覆盖区和交叉信号方阵组成有uwb定位坐标系;所述uwb定位坐标系的原点o
uwb
在局部地图坐标系下的坐标(x0,y0),两个坐标系夹角为θ(逆时针为正),设点p1在所述uwb定位坐标系中的坐标为:(x
′
,y
′
),在局部地图坐标系中的坐标为:(x,y),根据直角坐标系转换公式有:
12.x=x
′
cosθ
‑
y
′
sinθ x013.y=x
′
sinθ y
′
cosθ y014.步骤s42、所述北斗信号区具有经纬度坐标系;那么设局部地图坐标系原点的经纬度坐标为:(lon0,lat0),设点p2的经纬度坐标为:(lon,lat),其在局部坐标系的坐标为:(x,y),设地图经度和维度分辨率(1个像素点代表的经度和纬度值)为:lon_resolution、lat_resolution,地图空间分辨率(1个像素点实际距离,单位为:m)为:resolution,则有:
15.x=(lon
‑
lon0)/lon_resolution*resolution
16.y=(lat
‑
lat0)/lat_resolution*resolution。
17.优选的是,其中,所述步骤五包括,
18.步骤s51、构建栅格地图的方法为:首先从22级卫星地图转换出栅格地图,其中黑色部分代表障碍物(像素值为0),白色部分代表可通行区域(像素值为255),灰色部分代表位置区域(像素值100);灰色粗线条代表绘制的库位地块信息(像素值为150)。
19.步骤s52、将所述局部地图坐标系转化为像素坐标系的方法为:所述栅格地图是一张图片文件,图片具有一个像素坐标系原点位于栅格地图左上角,地图坐标系原点位于栅格地图的左下角,地图图片大小为:width*height,地图空间分辨率(1个像素点实际距离,
单位为:m)为:resolution。设点p3分别在像素坐标系和局部地图坐标系的坐标为(m,n)和(x,y),根据直角坐标系转换公式,则点p3从局部地图坐标系转换到像素坐标系为:
20.m=x/resolution
21.n=width
–
y/resolution
22.步骤s53、对机库内部的多个库位和机库外部的多个地块进行绘制的方法为:采用四点法,设一个库位11或地块12在局部地图坐标系的四个角点坐标为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4),将其转换为像素坐标系下为(m1,n1)、(m2,n2)、(m3,n3)、(m4,n4)根据两点式直线方程计算出(m1,n1)和(m2,n2)或(m2,n2)和(m3,n3)或(m3,n3)和(m4,n4)或(m1,n1)和(m4,n4)的直线方程,将在两点间并在直线上的像素点的像素值修改为150。
23.本发明至少包括以下有益效果:
24.全信号覆盖区配置方便,保证了智能农机在机库内能够稳定准确获取室内的定位信号,进一步提升智能农机导航回到库位的精度;交叉信号方阵可作为uwb定位信号和北斗卫星定位信号的稳定交叉覆盖区域,也相当于一个能够连接不同定位信号的缓冲区,为智能农机在反复出库入库这个关键阶段中,提供稳定高效的定位信号获取和切换能力,保证智能农机的后续导航移动更加精确稳定;最后将全信号覆盖区、交叉信号方阵、北斗信号区这三者进行融合定位,实现局部地图坐标系的统一,从而实现了uwb和北斗卫星的融合定位,更加高效稳定,室内外兼容性强,显著提升了装置的智能化和自动化程度。本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明:
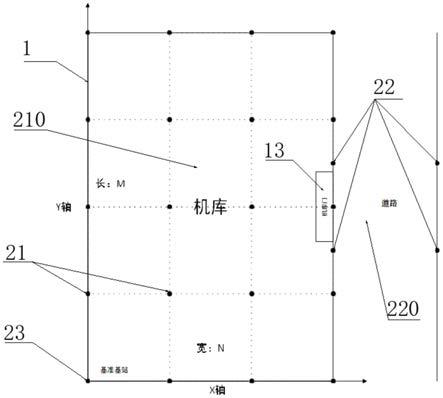
25.图1为本发明的机库分布示意图;
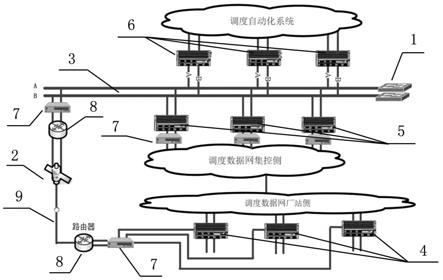
26.图2为本发明的uwb定位基站部署示意图;
27.图3为本发明的机库门智能控制系统组成图;
28.图4为本发明的局部地图坐标系与像素坐标系关系示意图;
29.图5为本发明的uwb定位坐标系与局部地图坐标系关系示意图;
30.图6为本发明的农场栅格地图;
31.图7为本发明的出库流程图;
32.图8为本发明的入库流程图;
具体实施方式:
33.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不排除一个或多个其它元件或其组合的存在或添加。需要说明的是,在本发明的描述中,术语指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也
可以通过中间媒介间接相连,可以是两个元件内部的连通,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。此外,在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。
34.实施例1
35.一种智能农机自动出入机库方法,包括以下步骤:
36.步骤一、在机库1内部设置一个由多个uwb定位基站ⅰ21组成的全信号覆盖区210;
37.所述步骤一中,所述全信号覆盖区210的配置方法为:单个所述uwb定位基站ⅰ21的信号覆盖半径为l,根据实际部署机库1的长宽为m*n,在机库1内部间隔安装(m/l)*(n/l)个uwb定位基站ⅰ21,从而构成了所述全信号覆盖区210。
38.步骤二、在机库1门口设置一个由多个uwb定位基站ⅱ22组成的交叉信号方阵220;
39.所述步骤二中,所述交叉信号方阵220的配置方法为:单个所述uwb定位基站ⅱ22的信号覆盖半径为l,将多个所述uwb定位基站ⅱ22的其中两个分别设置于距所述机库1门口左右l/2处,另外两个在同一平面上平行间隔设置于机库1外部的道路上,形成矩阵;从而构成了所述交叉信号方阵220。
40.步骤三、uwb基站的连接部署及标定、进行机库门的智能化部署;所述步骤三包括,
41.步骤s31、所述uwb基站的连接部署及标定方法为:选择机库1内部左下角的uwb定位基站ⅰ21为基准基站23并以此为坐标系原点,以水平方向为x轴,垂直方向为y轴,逐一标定各个基站ⅰ21、基站ⅱ22与所述基准基站23的位置关系,标定完成后将标定数据写入智能农机上的uwb车载主动定位模块33;uwb车载主动定位模块33接收基站定位信号解算出定位数据并将其推送到主控机31,供主控机31定位导航使用;所述机库1内部设置有同步控制器24;每个所述uwb定位基站ⅰ21和uwb定位基站ⅱ22之间都使用网线或光纤采用级联方式进行连接,最后连接至所述同步控制器24;
42.步骤s32、所述机库门的智能化部署方法为:机库1门口配置有电控化卷帘门13;所述电控化卷帘门13上设置有三个触发性的控制接口和门端无线控制模块132;三个所述控制接口分别被配置为用于控制所述电控化卷帘门13的开、关、暂停;所述门端无线控制模块132上设置有三个继电器133;三个所述继电器133分别与三个所述控制接口相连接;所述智能农机上设置有车端无线控制模块32;所述智能农机的主控机31通过rs232方式与所述车端无线控制模块32通信;所述车端无线控制模块32通过无线方式与所述门端无线控制模块132通信,从而控制所述电控化卷帘门13的开闭;所述门端无线控制模块132上设置有红外对射传感器321;所述电控化卷帘门13高度设为h,所述红外对射传感器321安装在0.8*h位置处,当收到读取电控化卷帘门13状态的指令时,通过内部传感器检测电控化卷帘门13的开闭状态并最终返回给主控机31。
43.步骤四、构建一个由所述全信号覆盖区210、交叉信号方阵220、机库1外部的北斗信号区所组成的,用于统一定位的局部地图坐标系;所述步骤四包括,
44.步骤s41、所述全信号覆盖区和交叉信号方阵组成有uwb定位坐标系41;所述uwb定位坐标系的原点o
uwb
在局部地图坐标系下的坐标(x0,y0),两个坐标系夹角为θ(逆时针为正),设点p1在所述uwb定位坐标系中的坐标为:(x
′
,y
′
),在局部地图坐标系中的坐标为:
(x,y),根据直角坐标系转换公式有:
45.x=x
′
cosθ
‑
y
′
sinθ x046.y=x
′
sinθ y
′
cosθ y047.步骤s42、所述北斗信号区具有经纬度坐标系;那么设局部地图坐标系原点的经纬度坐标为:(lon0,lat0),设点p2的经纬度坐标为:(lon,lat),其在局部坐标系的坐标为:(x,y),设地图经度和维度分辨率(1个像素点代表的经度和纬度值)为:lon_resolution、lat_resolution,地图空间分辨率(1个像素点实际距离,单位为:m)为:resolution,则有:
48.x=(lon
‑
lon0)/lon_resolution*resolution
49.y=(lat
‑
lat0)/lat_resolution*resolution。
50.步骤五、构建栅格地图;将所述局部地图坐标系转化为像素坐标系;对机库1内部的多个库位11和机库1外部的多个地块12进行绘制;所述步骤五包括,
51.步骤s51、构建栅格地图的方法为:首先从22级卫星地图转换出栅格地图,其中黑色部分53代表障碍物(像素值为0),白色部分54代表可通行区域(像素值为255),灰色部分55代表位置区域(像素值100);灰色粗线条56代表绘制的库位11地块12信息(像素值为150)。
52.步骤s52、将所述局部地图坐标系转化为像素坐标系的方法为:所述栅格地图是一张图片文件,图片具有一个像素坐标系原点51位于栅格地图左上角,地图坐标系原点52位于栅格地图的左下角,地图图片大小为:width*height,地图空间分辨率(1个像素点实际距离,单位为:m)为:resolution;设点p3分别在像素坐标系和局部地图坐标系的坐标为(m,n)和(x,y),根据直角坐标系转换公式,则点p3从局部地图坐标系转换到像素坐标系为:
53.m=x/resolution
54.n=width
–
y/resolution
55.步骤s53、对机库1内部的多个库位11和机库1外部的多个地块12进行绘制的方法为:采用四点法,设一个库位11或地块12在局部地图坐标系的四个角点坐标为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4),将其转换为像素坐标系下为(m1,n1)、(m2,n2)、(m3,n3)、(m4,n4)根据两点式直线方程计算出(m1,n1)和(m2,n2)或(m2,n2)和(m3,n3)或(m3,n3)和(m4,n4)或(m1,n1)和(m4,n4)的直线方程,将在两点间并在直线上的像素点的像素值修改为150。
56.步骤六、智能农机开始基于所述栅格地图进行导航,完成出库和入库的移动作业。
57.实施例2
58.出库流程:如图7所示,主控机31收到出库指令。对电控化卷帘门13发送开门指令,电控化卷帘门13开始打开;主控机31自动切换为uwb定位,进入自主导航,规划路线控制智能农机驶离机库1,同时实时检测电控化卷帘门13的状态,当到达电控化卷帘门13前时,若电控化卷帘门13未完全开启,则暂停等待电控化卷帘门13完全开启再驶离机库1,若完全开启则直接驶离机库,当智能农机驶出机库1后发送关门指令关闭电控化卷帘门13;并在过程中实时检测智能农机周围是否存在障碍物,若存在则智能农机停止等待报警障碍物移开,然后恢复自主导航。当农机驶离uwb定位区域,即所述全信号覆盖区210和交叉信号方阵220所组成的区域后,自动切换为北斗定位导航至地块12结束;在此过程中实时检测智能农机周围是否存在障碍物,若存在并可绕障则规划路径绕过障碍物,不可绕过则停车报警。
59.实施例3
60.入库流程:如图8所示,主控机31收到入库指令。然后进入自主导航,规划路线控制智能农机驶往机库1;在此过程中实时检测智能农机周围是否存在障碍物,若存在并可绕障则规划路径绕过障碍物,不可绕过则停车报警。当智能农机导航到达电控化卷帘门13前时停车,自动切换为uwb定位,发送开门指令等待电控化卷帘门13完全开启,完全开启后自主导航至空库位停车,最后发送关门指令关闭电控化卷帘门13结束。并在过程中实时检测农机周围是否存在障碍物,若存在则智能农机停止报警等待障碍物移开,然后恢复自主导航。
61.在本发明中,全信号覆盖区210安装配置方便,保证了智能农机在机库1内能够稳定准确获取室内的uwb定位信号,进一步提升智能农机导航回到库位11的精度;交叉信号方阵220可作为uwb定位信号和北斗卫星定位信号的稳定交叉覆盖区域,也相当于一个能够连接不同定位信号的缓冲过渡区,为智能农机在反复出库入库这个关键阶段中,提供稳定高效的定位信号获取和切换能力,保证智能农机的后续导航移动更加精确稳定;最后将全信号覆盖区210、交叉信号方阵220、北斗信号区这三者进行融合定位,实现局部地图坐标系的统一,从而实现了uwb信号和北斗卫星的融合定位,更加高效稳定,避障能力强,室内外兼容性强,显著提升了装置的智能化和自动化程度。
62.这里说明的设备数量和处理规模是用来简化本发明的说明的。对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。