技术特征:
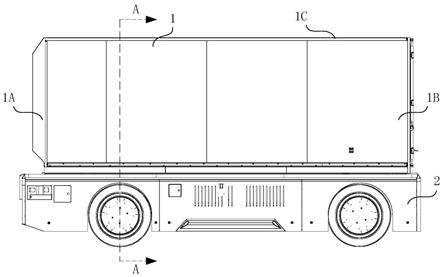
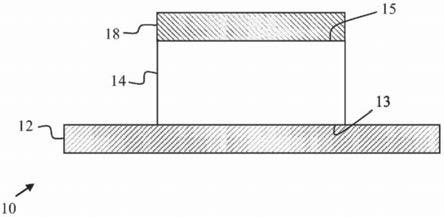
1.一种无人平台运输系统,其特征在于,包括:至少一用于搬运货箱(1)的无人平台车(2)和至少一无人转运装置(5);所述无人平台车(2)的顶部与所述货箱(1)的底部分别设有相互配合的引导组件(3);所述无人转运装置(5)设置于至少一吊机(6)的行程范围下方,供吊机(6)将货箱(1)中转放置,所述无人平台车(2)与对应的所述无人转运装置(5)对接,通过所述引导组件(3)引导所述货箱(1)沿所述无人平台车(2)的长度方向滑入且限位于所述无人平台车(2)的顶部,所述无人平台车(2)的两侧通过定位组件(4)与所述货箱(1)可拆卸地限位连接。2.根据权利要求1所述的无人平台运输系统,其特征在于,基于所述货箱(1)的编号信息和无人转运装置(5)的位置信息生成对接任务,发送到被配置为搬运所述货箱(1)的所述无人平台车(2),所述无人平台车(2)基于所述对接任务进行路径导航与对应的所述无人转运装置(5)对接。3.根据权利要求1所述的无人平台运输系统,其特征在于,所述引导组件(3)包括:至少两排滚轮(31),设置于所述货箱(1)的底部;至少两排滑槽(32),设置于所述无人平台车(2)的顶部,每排所述滑槽(32)限位一排所述滚轮(31),供所述滚轮(31)在所述滑槽(32)中滑动。4.根据权利要求1所述的无人平台运输系统,其特征在于,所述定位组件(4)包括:至少两组卡榫(41),设置于所述货箱(1)的两侧;至少两组卡扣(42),设置于所述无人平台车(2)的两侧,每个所述卡扣(42)与所述卡榫(41)卡合,将所述货箱(1)可拆卸地限位于所述无人平台车(2)的上表面。5.根据权利要求1所述的无人平台运输系统,其特征在于,所述无人平台车(2)的一侧的滑槽(32)端部设有第一对接件(21);所述无人转运装置(5)包括至少两排受电机驱动的传动带,所述货箱(1)压接于所述传动带,所述传动带的端部设有第二对接件(51),当所述无人平台车(2)与所述无人转运装置(5)对接时,所述第一对接件(21)和第二对接件(51)插接共同形成至少部分滑槽,供所述货箱(1)受所述传动带的驱动向所述无人平台车(2)移动,沿所述滑槽滑入所述无人平台车(2)的顶部。6.根据权利要求1所述的无人平台运输系统,其特征在于,当所述吊机(6)的任务队列中下一个吊装任务对应的无人平台车(2)未驶入所述吊机(6)的行程范围下方,则所述吊机(6)将所述吊装任务的货箱(1)吊装到所述行程范围下方的一个空闲的无人转运装置(5)。7.根据权利要求1所述的无人平台运输系统,其特征在于,每个所述吊机(6)的行程范围的下方设有若干无人转运装置(5),且所述无人转运装置(5)分布于所述行程范围的边沿。8.根据权利要求1所述的无人平台运输系统,其特征在于,所述无人平台车(2)的长度与所述货箱(1)的长度相等;所述无人平台车(2)的宽度与所述货箱(1)的宽度相等。9.一种无人平台运输方法,采用如权利要求1所述的无人平台运输系统,其特征在于,包括:s110、判断所述吊机的任务队列中下一个吊装任务对应的无人平台车是否驶入所述吊机的行程范围下方,若是,则执行步骤s120,若否,则执行步骤s130;s120、将所述吊装任务的货箱吊装到所述无人平台车,返回步骤s110;
s130、判断所述行程范围下方是否具有至少一空闲的无人转运装置,若是,则执行步骤s140,若否,则执行步骤s180;s140、所述吊机将所述吊装任务的货箱吊装到所述行程范围下方的一个空闲的无人转运装置;s160、当所述无人平台车与所述无人转运装置对接后,所述无人转运装置传动所述货箱沿所述无人平台车的长度方向滑入且限位于所述无人平台车的顶部;s170、所述无人平台车的两侧通过定位组件与所述货箱可拆卸地限位连接;s180、结束。10.根据权利要求9所述的无人平台运输方法,其特征在于,步骤s140与步骤s160之间还包括:步骤s150、基于所述货箱的编号信息和无人转运装置的位置信息生成对接任务,发送到被配置为搬运所述货箱的所述无人平台车。11.一种无人平台运输设备,其特征在于,包括:处理器;存储器,其中存储有所述处理器的可执行指令;其中,所述处理器配置为经由执行所述可执行指令来执行权利要求9所述无人平台运输方法的步骤。12.一种计算机可读存储介质,用于存储程序,其特征在于,所述程序被处理器执行时实现权利要求9所述无人平台运输方法的步骤。
技术总结
本发明提供了无人平台运输系统、方法、设备及存储介质,系统包括:用于搬运货箱的无人平台车和无人转运装置;无人平台车的顶部与货箱的底部分别设有相互配合的引导组件;无人转运装置设置于至少一吊机的行程范围下方,供吊机将货箱中转放置,当无人平台车基于对接任务进行路径导航与对应的无人转运装置对接,通过引导组件引导货箱沿无人平台车的长度方向滑入且限位于无人平台车的顶部,无人平台车的两侧通过定位组件与货箱可拆卸地限位连接。本发明能够减少吊车的无效待机时间,增强吊车的工作效率,减少无人平台车的等待时间,优化无人码头的运转效率。码头的运转效率。码头的运转效率。
技术研发人员:谭黎敏 梁炽盛 刘辉
受保护的技术使用者:上海西井信息科技有限公司
技术研发日:2021.07.30
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。