技术特征:
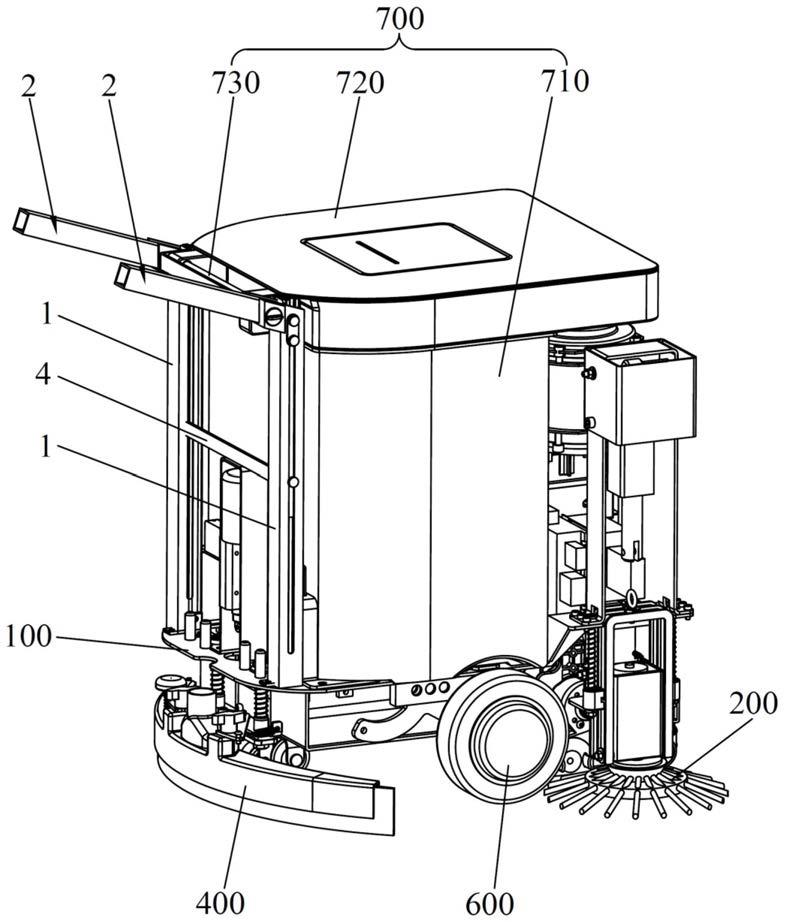
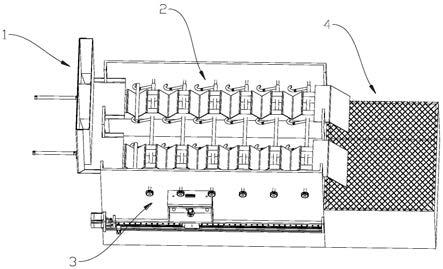
1.一种把手模块,其特征在于,包括:本体(1),所述本体(1)为中空结构,且所述本体(1)上开设有与其内腔连通的第一开口(11),所述本体(1)上设置有固定组件(12);把手组件(2),滑动设置于所述本体(1)的内腔中,所述把手组件(2)包括活动连接的把手件(21)和支撑件(22),所述把手件(21)能由所述第一开口(11)伸出所述本体(1),且所述把手件(21)相对于所述支撑件(22)运动至能与所述固定组件(12)连接的位置,并由所述固定组件(12)固定。2.根据权利要求1所述的把手模块,其特征在于,所述把手件(21)与所述支撑件(22)铰接,所述把手件(21)伸出所述本体(1)后,所述把手件(21)相对于所述支撑件(22)转动,以与所述固定组件(12)连接。3.根据权利要求2所述的把手模块,其特征在于,所述把手件(21)上设置有第一连接孔(211),所述固定组件(12)包括固定本体(121)、锁定件(122)和弹性件(123),所述固定本体(121)与所述本体(1)连接,所述锁定件(122)滑动设置于所述固定本体(121)上,所述弹性件(123)的两端分别连接于所述锁定件(122)和所述固定本体(121),所述锁定件(122)能够在所述弹性件(123)的弹性力作用下插入所述第一连接孔(211)。4.根据权利要求3所述的把手模块,其特征在于,所述固定组件(12)还包括解锁件(124),所述解锁件(124)与所述锁定件(122)连接,所述解锁件(124)能够带动所述锁定件(122)克服所述弹性件(123)的弹性力而滑动,以脱离所述第一连接孔(211)。5.根据权利要求4所述的把手模块,其特征在于,所述解锁件(124)上设置有第一配合面(12412a),所述固定本体(121)上设置有与所述第一配合面(12412a)相贴合的第二配合面(12111b),驱动所述解锁件(124)相对于所述固定本体(121)转动,同时所述解锁件(124)在所述第二配合面(12111b)的作用下相对于所述固定本体(121)移动,以带动所述锁定件(122)脱离所述第一连接孔(211)。6.根据权利要求1所述的把手模块,其特征在于,所述把手件(21)上设置有滑轨(2131),所述支撑件(22)上设置有与所述滑轨(2131)配合的第一凸起(27),所述把手件(21)伸出所述本体(1)并绕所述第一凸起(27)转动预设角度后,所述把手件(21)能相对于所述支撑件(22)移动至所述把手件(21)与所述固定组件(12)连接。7.根据权利要求6所述的把手模块,其特征在于,所述滑轨(2131)沿所述把手件(21)的长度方向延伸。8.根据权利要求6或7所述的把手模块,其特征在于,所述把手件(21)包括把手部(212)和两个第一连接部(213),两个所述第一连接部(213)上均设置有所述滑轨(2131),且两个所述第一连接部(213)分设于所述支撑件(22)的相对的两侧,所述把手部(212)连接于两个所述第一连接部(213)远离所述支撑件(22)的一端。9.根据权利要求8所述的把手模块,其特征在于,所述本体(1)包括呈夹角设置的第一本体(11a)和第二本体(11b),所述把手组件(2)设置于所述第一本体(11a)上,所述固定组件(12)包括设置于所述第二本体(11b)上的第二连接孔(125),所述第一连接部(213)能够插入所述第二连接孔(125)内。10.一种清洁机器人,其特征在于,包括机架以及如权利要求1
‑
9任一项所述的把手模块,所述把手模块设置于所述机架上。
技术总结
本发明属于清洁设备技术领域,公开一种把手模块及清洁机器人。其中,把手模块包括本体和把手组件。本体为中空结构,且本体上开设有与其内腔连通的第一开口,本体上设有固定组件;把手组件滑动设于本体的内腔中,把手组件包括活动连接的把手件和支撑件,把手件能由第一开口伸出本体,且把手件相对于支撑件运动至能与固定组件连接的位置,并由固定组件固定。无需把手时,把手组件容置于本体内,整个设备尺寸小,行走及转弯便捷,且设备存放占用空间小。需要把手时,把手组件相对于本体朝向第一开口滑动,把手件由第一开口伸出本体,之后把手件相对于支撑件运动,以使得固定组件将把手件固定,从而实现把手组件的固定,以供清洁人员握持。员握持。员握持。
技术研发人员:孙书晨 李孝亮 夏辉 章甘 陈文凯 王生贵 李振
受保护的技术使用者:上海高仙自动化科技发展有限公司
技术研发日:2021.09.27
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。