1.本发明涉及巡检机器人掉电保护控制技术领域,具体涉及一种掉电保护的主动放电电路及主动放电方法。
背景技术:
2.目前巡检机器人都配置有掉电保护电路,法拉电容是该电路中最常用的储能元件。机器人在人为关机或异常掉电情况下,可以实现水平位置、升降位置等重要参数的自动保护功能。但是完成掉电保护动作后,很少对法拉电容的残余电量进行泄放处理,导致掉电保护完成后,法拉电容仍残留有部分电量,若不能及时泄放可能会导致机器人不可预估的后果,如:关机后立马开机,若mcu未能掉电重启,进而无法运行各项初始化函数及完成相关外部设备的初始化操作,导致机器人内部相关设备无法工作在正常模式。
技术实现要素:
3.发明目的:本发明目的在于针对现有技术的不足,提供一种掉电保护的主动放电电路及主动放电方法,在控制器完成保护动作后,主动对法拉电容进行放电,避免发生背景技术出现的异常情况。
4.技术方案:本发明所述掉电保护的主动放电电路,包括状态检测电路、掉电维持电路、法拉电容、控制器,状态检测电路与控制器相连,法拉电容与掉电维持电路相连;所述控制器通过放电电路与法拉电容相连,所述放电电路包括第一导通单元、第二导通单元、放电电阻,所述第二导通单元的输出端与第一导通单元的控制端相连,所述法拉电容的放电端经放电电阻、第一导通单元与gnd端连接;所述状态检测电路输出两种状态信号至控制器,控制器的release_vol信号端对应两种状态信号分别输出高电平、低电平;所述release_vol信号端输出高电平时,所述第二导通单元导通、第一导通单元关闭,所述法拉电容经放电电阻、第一导通单元与gnd端之间的连接关闭;所述release_vol信号端输出低电平时,所述第二导通单元关闭、第一导通单元导通,所述法拉电容经放电电阻、第一导通单元与gnd端导通。
5.进一步完善上述技术方案,所述状态检测电路输出两种状态信号分别为正常运行状态信号、掉电状态信号,所述控制器的release_vol信号端对应正常运行状态信号输出高电平,所述控制器的release_vol信号端对应掉电状态信号输出低电平。
6.进一步地,所述第二导通单元为第二npn三极管,所述release_vol信号端经电阻一与第二npn三极管的b极相连,第二npn三极管的b极通过电阻二与gnd端相连,第二npn三极管的c极经电阻三与所述第一导通单元的控制端相连,第二npn三极管的e端与gnd端相连。
7.进一步地,所述第一导通单元为第一npn三极管,所述电阻三与第一npn三极管的b极相连,所述法拉电容通过电阻五与第一npn三极管的b极相连,第一npn三极管的b极通过电阻四与gnd端相连,第一npn三极管的c端与所述放电电阻相连,第一npn三极管的e端与所
述gnd端相连。
8.进一步地,所述控制器输出高电平为3.3v,低电平为0v。
9.进一步地,所述电阻三的阻值为0ω。机器人上电后,确保第一三极管的b极电压尽可能接近0v,从而关闭放电电路,同时0欧的感性具有抗干扰的作用。
10.进一步地,所述放电电阻的阻值为2ω,所述法拉电容的0.22f,放电时间在200ms以内。
11.进一步地,所述电阻一的阻值为1kω,电阻二的阻值为10kω。
12.进一步地,所述电阻四的阻值为22kω,所述电阻五的阻值为5.1kω。
13.基于上述掉电保护的主动放电电路实现的主动放电方法,包括:正常工作状态:巡检机器人正常工作时,状态检测电路输出正常运行状态信号,控制器接收到正常运行状态信号后通过release_vol信号端输出高电平,第二npn三极管导通,第一npn三极管关闭,法拉电容经放电电阻、第一npn三极管与gnd端之间的连接关闭;掉电状态:巡检机器人掉电瞬间,状态检测电路输出掉电状态信号,控制器接收到掉电状态信号后通过release_vol信号端输出低电平,第二npn三极管关闭,第一npn三极管导通,法拉电容经放电电阻、第一npn三极管对gnd端进行放电。
14.有益效果:与现有技术相比,本发明的优点在于:本发明的主动放电电路将在控制器完成保护动作后,主动对法拉电容进行放电,避免出现整机不能完整掉电重启导致其它异常情况出现;避免了用户对机器人关机后不能够立马上电开机的情况,提升了用户体验;整体电路简单,采用分离器件搭建,成本低廉。
附图说明
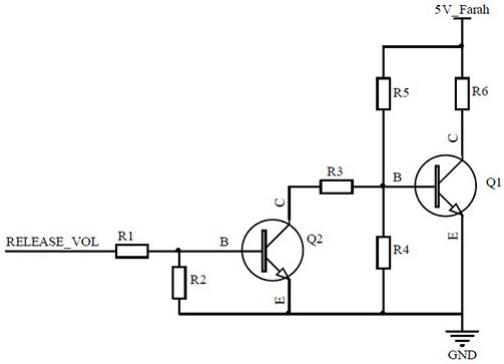
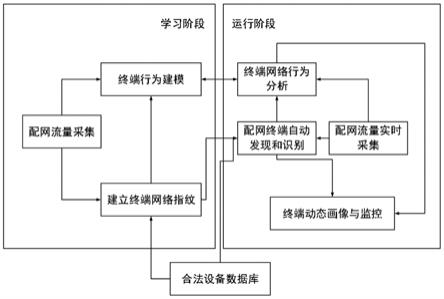
15.图1是本发明的整体原理框图;图2是放电电路的电路原理图。
具体实施方式
16.下面通过附图对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
17.如图1所示的掉电保护的主动放电电路,包括状态检测电路、掉电维持电路、法拉电容、控制器mcu、放电电路,状态检测电路与控制器mcu相连,法拉电容与掉电维持电路相连,控制器mcu通过放电电路与法拉电容相连。状态检测电路输出正常运行状态信号、掉电状态信号,控制器mcu的release_vol信号端对应正常运行状态信号输出高电平, release_vol信号端对应掉电状态信号输出低电平。
18.如图2所示,放电电路包括npn三极管q1、npn三极管q2,电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6。r1=1kω,r2=10kω,r3=0ω,r4=22kω,r5=5.1kω, r6=2ω。
19.工作过程和原理:控制器mcu输出高电平为3.3v、低电平为0v,通过控制三极管q2的c、e极导通、关断,进而控制三极管q1的c、e极导通、关断,最终控制法拉电容放电。
20.基于上述掉电保护的主动放电电路实现的主动放电方法,包括:正常工作状态:当机器人整机正常带电运行状态下,控制器mcu接收到状态检测电路输出正常运行状态信号,会将release_vol信号输出高电平,三极管q2导通,电阻r3为0欧
姆电阻,三极管q1的b极是低电平,三极管q1关闭,法拉电容的电源5v_farah不会对gnd放电。
21.关机瞬间:当机器人掉电瞬间,控制器mcu接收到状态检测电路输出掉电状态信号,会将release_vol信号输出为低电平,三极管q2关闭,三极管q1导通,法拉电容的电源5v_farah通过电阻r6对gnd放电。在较短时间内将法拉电容的能量泄放掉,确保控制器mcu完全掉电,避免出现整机设备异常等情况发生。
22.电阻r6阻值需要根据法拉电容值及掉电时间计算得到,一般需要封装较大的功率电阻。设:v0 为法拉电容上的初始电压值,v1 为法拉电容最终放到的电压值,vt 为t时刻法拉电容上的电压值;则:vt=v0 (v1
‑
v0)* [1
‑
exp(
‑
t/rc)];或t = rc*ln[(v1
‑
v0)/(v1
‑
vt)];设:触发掉电保护后,控制器mcu需要100ms完成参数存储,法拉电容电压消耗至3.0v,当控制器mcu电源电压低于2.0v时,控制器mcu不再工作;v0=3.0v,v1=0v,c=0.22f, r=2ω,vt=2.0v;t=2*0.22ln[(0
‑
3.0)/(0
‑
2.0)];t=178ms;经过计算使用2ω的功率放电电阻,178ms后可以将剩余电量泄放。
[0023]
本发明提供的主动放电电路将在控制器mcu完成保护动作后,主动对法拉电容进行放电,避免出现整机不能完整掉电重启导致其它异常情况出现;避免了用户对巡检机器人关机后不能够立马上电开机的情况,提升了用户体验;整体电路简单,采用分离器件搭建,成本低廉。
[0024]
如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。