1.本发明涉及一种永磁同步电机霍尔信号在线校正方法,属于电机控制方法技术领域。
背景技术:
2.永磁同步电机在要求不高或低成本的场合,通常采用3个或2个霍尔传感器作为位置和速度反馈量使用。永磁同步电机矢量控制时需要准确知道转子的磁极位置,霍尔传感器在使用过程中受到震动等影响常常发生偏移变化,导致反馈位置发生变化,在此情况下无论采用方波控制还是正弦波控制都会导致控制性能不佳。因此,迫切需要一种永磁同步电机霍尔信号在线校正方法,以解决现有技术中存在的这一问题。
3.为了解决上述技术问题,特提出一种新的技术方案。
技术实现要素:
4.本发明的目的在于提供一种永磁同步电机霍尔信号在线校正方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种永磁同步电机霍尔信号在线校正方法,所述方法包含下述步骤:
6.步骤一,依靠3个霍尔的信号提供磁极位置信息;
7.3个霍尔的信号2进制组合可以组成8组信号:000、001、010、011、100、101、110和111;其中000和111信号为错误信号,可用于霍尔信号故障检测,001、010、011、100和101为有效状态信号;
8.步骤二,如果3个霍尔对称安装每个状态对应的角度范围为60
°
电角度,不管霍尔位置安装如何,任何一种霍尔有效状态s到下一个同样的状态s(n 1),电机的磁极位置旋转角度的都是360电角度,既一个电周期;
9.步骤三,电机在高速状态下,在一个电周期内认为电机的速度不变;
10.步骤四,电机运行旋转时,霍尔信号所对应的有效状态为s1、s2、s3、s4、s5和s6,各个状态的时间为t1、t2、t3、t4、t5和t6,其中,一个周期的总时间为ts;
11.ts=t1 t2 t3 t4 t5 t6
12.步骤五,假如永磁同步电机正转时,霍尔的变化范围为s5‑
s1‑
s3‑
s2‑
s6‑
s4,每次变化时进入捕捉中断,记录每个状态值的时间;
13.其中,s5状态到下一个s5(n 1)状态,记录其总时间ts,对应角度为360
°
;
14.s5到s1的捕捉时间为t5,则s5状态所对应的角度:
[0015][0016]
依次记录其它状态的时间,计算出各个状态所对应的便宜角度:
[0017][0018][0019][0020][0021][0022]
优选地,电机在高速状态下是指电机的转速大于40%的额定转速。但不限于40%。
[0023]
优选地,所述永磁同步电机可替换为无刷直流电机。
[0024]
与现有技术相比,本发明的有益效果是:提出一种永磁同步电机霍尔信号在线校正方法,实时校正获取的角度和速度,保证电机的控制性能最佳。
附图说明
[0025]
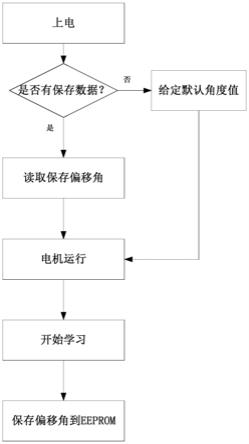
图1为本发明学习校正流程示意图。
具体实施方式
[0026]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0027]
请参阅说明书附图,本发明提供一种技术方案:一种永磁同步电机霍尔信号在线校正方法,所述方法包含下述步骤:
[0028]
步骤一,依靠3个霍尔的信号提供磁极位置信息;
[0029]
3个霍尔的信号2进制组合可以组成8组信号:000、001、010、011、100、101、110和111;其中000和111信号为错误信号,可用于霍尔信号故障检测,001、010、011、100和101为有效状态信号;
[0030]
步骤二,如果3个霍尔对称安装每个状态对应的角度范围为60
°
电角度,不管霍尔位置安装如何,任何一种霍尔有效状态s到下一个同样的状态s(n 1),电机的磁极位置旋转角度的都是360电角度,既一个电周期;
[0031]
步骤三,电机在高速状态下,在一个电周期内认为电机的速度不变;
[0032]
步骤四,电机运行旋转时,霍尔信号所对应的有效状态为s1、s2、s3、s4、s5和s6,各个状态的时间为t1、t2、t3、t4、t5和t6,其中,一个周期的总时间为ts;
[0033]
ts=t1 t2 t3 t4 t5 t6
[0034]
步骤五,假如永磁同步电机正转时,霍尔的变化范围为s5‑
s1‑
s3‑
s2‑
s6‑
s4,每次变化时进入捕捉中断,记录每个状态值的时间;
[0035]
其中,s5状态到下一个s5(n 1)状态,记录其总时间ts,对应角度为360
°
;
[0036]
s5到s1的捕捉时间为t5,则s5状态所对应的角度:
[0037][0038]
依次记录其它状态的时间,计算出各个状态所对应的便宜角度:
[0039][0040][0041][0042][0043][0044]
本案取速度大于40%的额定转速才开始学习校正。但不限于40%。
[0045]
本案的方法也适用于无刷直流电机,无刷直流电机的霍尔信号在线校正方法也在本权利保护范围。
[0046]
本发明可根据电机的运行状态动态实时学习霍尔传感器信号的误差偏移角。
[0047]
如图1所示,系统上电后检测芯片内部是否有保存的角度数据,如果没有则给定初始默认值,默认值为每个状态均匀,所对应的角度均为60
°
;带电机运行后动态学习校正保存数据。如果芯片内部是有保存的角度数据,就读取保存的角度数据,电机运行后,根据运行条件学习校正,完成后保存到芯片内部eeprom或芯片的flash。
[0048]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
技术特征:
1.一种永磁同步电机霍尔信号在线校正方法,其特征在于,所述方法包含下述步骤:步骤一,依靠3个霍尔的信号提供磁极位置信息;3个霍尔的信号2进制组合可以组成8组信号:000、001、010、011、100、101、110和111;其中000和111信号为错误信号,可用于霍尔信号故障检测,001、010、011、100和101为有效状态信号;步骤二,如果3个霍尔对称安装每个状态对应的角度范围为60
°
电角度,不管霍尔位置安装如何,任何一种霍尔有效状态s到下一个同样的状态s(n 1),电机的磁极位置旋转角度的都是360电角度,既一个电周期;步骤三,电机在高速状态下,在一个电周期内认为电机的速度不变;步骤四,电机运行旋转时,霍尔信号所对应的有效状态为s1、s2、s3、s4、s5和s6,各个状态的时间为t1、t2、t3、t4、t5和t6,其中,一个周期的总时间为ts;ts=t1 t2 t3 t4 t5 t6步骤五,假如永磁同步电机正转时,霍尔的变化范围为s5‑
s1‑
s3‑
s2‑
s6‑
s4,每次变化时进入捕捉中断,记录每个状态值的时间;其中,s5状态到下一个s5(n 1)状态,记录其总时间ts,对应角度为360
°
;s5到s1的捕捉时间为t5,则s5状态所对应的角度:依次记录其它状态的时间,计算出各个状态所对应的便宜角度:依次记录其它状态的时间,计算出各个状态所对应的便宜角度:依次记录其它状态的时间,计算出各个状态所对应的便宜角度:依次记录其它状态的时间,计算出各个状态所对应的便宜角度:依次记录其它状态的时间,计算出各个状态所对应的便宜角度:2.根据权利要求1所述的永磁同步电机霍尔信号在线校正方法,其特征在于:电机在高速状态下是指电机的转速大于40%的额定转速。但不限于40%。3.根据权利要求1所述的永磁同步电机霍尔信号在线校正方法,其特征在于:所述永磁同步电机可替换为无刷直流电机。
技术总结
本发明公开了一种永磁同步电机霍尔信号在线校正方法,依靠3个霍尔的信号提供磁极位置信息;3个霍尔的信号2进制组合可以组成8组信号,可用于霍尔信号故障检测;如果3个霍尔对称安装每个状态对应的角度范围为60
技术研发人员:朱勇
受保护的技术使用者:深圳市圳远电气有限公司
技术研发日:2021.09.01
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。