1.本发明涉及风力发电领域,具体的说是基于电压源型双馈风电机组有功振荡的抑制方法。
技术背景
2.风力发电作为一种清洁的可再生能源,近年来得到快速的发展。随着风电场单机容量的增加,电网的电压和频率支持能力越来越不足,在弱电网条件下,由于锁相环(pll)的性能恶化,风电场的运行性能变差。电压源型双馈风力发电机(vc
‑
dfig)由于其自同步控制特性、主动支持电网电压和频率的能力而受到广泛关注。电压源型双馈风力发电机是一个多回路串级控制系统,当有功功率功率指令和电网频率扰动发生时,不适当的电压环带宽参数将导致严重的有功功率振荡和过冲,影响并网工作性能。
3.针对电压源型双馈风力发电机并网点有功功率振荡的抑制问题,根据已有公开的参考文献,一些研究的主要方法有:
4.文献1“li,m.,zhang,x.,guo,z.,wang,j.,li,f.:
‘
the dual
‑
mode combined control strategy for centralized photovoltaic grid
‑
connected inverters based on double
‑
split transformers’,ieeetrans.ind.electron.,2020,early access”(基于双分裂变压器的集中式光伏并网逆变器双模组合控制策略)提出了一种双模控制策略,在强电网中采用电流控制模式,而在弱电网中则切换到电压控制模式,从而有效地集成了两种模型的优点,抑制有功振荡的发生。但是频繁的切换会产生干扰。
5.文献2“j.alipoor,y.miura,and t.ise.:
‘
power system stabilization using virtual synchronous generator with alternating moment of inertia’,ieee j.emerg.sel.top.power electron.,2015,3,(2),pp.451
‑
458”(基于虚拟交流惯性矩同步发电机的电力系统稳定)提出了一种虚拟惯性bang
‑
bang控制策略,在每个功率振荡周期内,虚拟惯性根据频率变化率的动态变化进行调整。在保持功率控制精度的同时,降低了有功功率的振荡。然而,仅通过功率环的参数优化在设计上没有普遍的适应性。当电网强度变化或硬件电路改变时,以前的参数不再适用。
6.文献3“l.harnefors,m.hinkkanen,u.riaz,f.m.m.rahman and l.zhang.:
‘
robust analytic design 0f power
‑
synchronization control’,ieee trans.ind.electron.,2019,66,(8),pp.5810
‑
5819”(功率同步控制的鲁棒分析设计)提出了一种下垂控制的鲁棒性设计方法,该方法是对功率环的参数进行的调整以抑制有功振荡,但是这种方法依赖于参数的设置,对参数的变化较为灵敏。
技术实现要素:
7.本发明为解决现有技术的不足之处,提出基于电压源型双馈风电机组有功振荡的抑制方法,在有功功率环中增加超前滞后控制,实现有功功率振荡的抑制。
8.为了实现上述目的,本发明提供一种基于电压源型双馈风电机组有功振荡的抑制
方法,包括以下步骤:
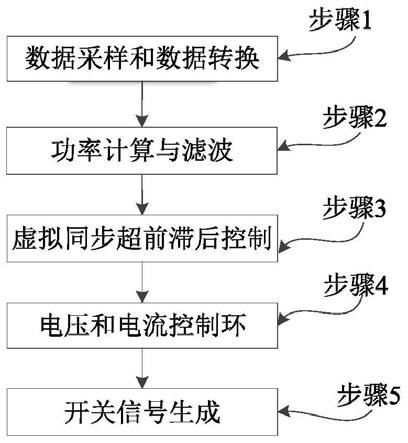
9.步骤1,数据采样和数据转换
10.步骤1.1,采样双馈发电机定子三相电压u
a
,u
b
,u
c
,采样双馈发电机定子三相电流i
a
,i
b
,i
c
,采样双馈发电机转子三相电流i
a
,i
b
,i
c
,采样并网点三相电压幅值u
pcc
,采样并网点角频率ω
pcc
,利用光电编码器采集所述双馈发电机转子角速度ω
r
;
11.步骤1.2,将所述双馈发电机定子三相电压u
a
,u
b
,u
c
进行同步旋转坐标变换,得到定子电压d轴分量u
sd
和定子电压q轴分量u
sq
;将所述双馈发电机定子三相电流i
a
,i
b
,i
c
进行同步旋转坐标变换,得到定子电流d轴分量i
sd
和定子电流q轴分量i
sq
;将所述双馈发电机转子三相电流i
a
,i
b
,i
c
进行同步旋转坐标变换,得到转子电流d轴分量i
rd
和转子电流q轴分量i
rq
;对所述转子角速度ω
r
进行积分运算,得到转子旋转角度θ
r
;
12.步骤2,功率计算与滤波
13.利用式(1)进行功率计算得到定子输出有功功率p
′
和定子输出无功功率q
′
:
[0014][0015]
利用式(2)得到经过低通滤波器后的有功功率p和经过低通滤波器后的无功功率q:
[0016][0017]
在式(2)中,ω
f
为低通滤波器的截至频率,s为拉普拉斯算子;
[0018]
步骤3,虚拟同步超前滞后控制
[0019]
利用式(3)得到角频率指令ω
*
、d轴电压指令分量和q轴电压指令分量从而实现虚拟同步超前滞后控制:
[0020][0021]
在式(3)中,p
ref
为有功功率给定值,q
ref
为无功功率给定值,ω
n
为并网点的额定角频率,u
n
为并网点的额定电压,j
d
为惯性系数,d
d
为阻尼系数,k
q
为无功功率下垂系数,k
u
为无功电压调节系数,k
d
为超前环节系数,t
d
为滞后环节系数;
[0022]
利用式(4)得到超前环节系数k
d
和滞后环节系数t
d
的取值:
[0023][0024]
利用式(5)得到定子旋转角度θ1和转差角度θ2:
[0025][0026]
步骤4,电压和电流控制环
[0027]
利用式(6)得到转子电流指令q轴分量i
rq*
和转子电流指令d轴分量i
rd*
:
[0028][0029]
在式(6)中,k
up
为电压环pi调节器pi
v
的比例控制系数,k
ui
为电压环pi调节器pi
v
的积分控制系数;
[0030]
利用式(7)得到转子电压q轴分量u
rq
和转子电压d轴分量u
rd
:
[0031][0032]
在式(7)中,k
ip
为电流环pi调节器pi
i
的比例控制系数,k
ii
为电流环pi调节器pi
i
的积分控制系数;
[0033]
步骤5,开关信号生成
[0034]
将所述转子电压d轴分量u
rd
和转子电压q轴分量u
rq
经过svpwm调制生成逆变器功率器件的开关信号s
a
,s
b
,s
c
,从而控制转子侧逆变器的功率器件的开通和关断。
[0035]
与现有技术相比,本发明的有益效果在于:
[0036]
1、本发明利用超前滞后控制有效地抑制了有功功率的振荡和超调,降低了有功功率振荡对功率环参数的敏感程度,提升了系统的鲁棒性,避免了在电网条件变化时功率环参数的设计复杂度,提高了电压源型双馈风力发电机系统的动态性能。
[0037]
2、本发明在采用双馈发电机的虚拟同步控制,内层结构为电压和电流控制环的双闭环控制,避免了电网强度变化时由于pll导致的稳定性问题,显著增加了双馈发电机的稳定性,并在在转子电流给定前使用了交叉控制,解决了电压与电流dq分量之间的耦合给系统分析带来的不便。
[0038]
3、本发明仅需在有功功率环路中上添加一个超前滞后控制环节,实现有功功率振荡的抑制,实现方式简便有效。
附图说明
[0039]
图1为本发明抑制方法的流程图。
[0040]
图2为本发明抑制方法的控制图。
[0041]
图3为本发明抑制方法的仿真图。
具体实施方式
[0042]
在本实施例中,实验平台用变频器驱动一台三相鼠笼式异步电动机拖动双馈发电机。电压源型双馈风力发电机组的组成包括风力机、感应电机、转子侧变流器和直流侧电容。转子侧变流器连接发电机转子,风力机捕捉的风能通过感应电机转换为电能注入电网。
[0043]
该模拟平台中的双馈发电机为一台绕线式感应电动机,其额定参数为:额定电压690v,定子额定电流1400a,转子额定电流550a,极对数为2对,定子电阻rs=0.0043ω,转子电阻rr=0.0041ω,定子漏抗ls=0.0125h,转子漏抗lr=0.0126h,励磁电抗lm=0.0123h。转子侧变流器额定参数为:额定容量2mw,直流侧电容cg=0.161mf,网侧电感lg=0.35mh,直流侧额定电压1050v,开关频率为2.5khz。该平台的功率波形由上位机采集,采样点数为4000/s。
[0044]
本发明应用在电压源型双馈风力发电机组中,当电网强度发生波动、功率环及电压电流环参数发生偏移,导致有功功率发生振荡,在转子侧变流器有功功率控制环中加入超前滞后控制,从而提出基于电压源型双馈风力发电机组的有功振荡抑制方法。
[0045]
图1为本发明抑制方法的流程图,图2为本发明抑制方法的控制图,由图1和图2可见,本发明基于电压源型双馈风电机组有功振荡的抑制方法包括以下步骤:
[0046]
步骤1,数据采样和数据转换
[0047]
步骤1.1,采样双馈发电机定子三相电压u
a
,u
b
,u
c
,采样双馈发电机定子三相电流i
a
,i
b
,i
c
,采样双馈发电机转子三相电流i
a
,i
b
,i
c
,采样并网点三相电压幅值u
pcc
,采样并网点角频率ω
pcc
,利用光电编码器采集所述双馈发电机转子角速度ω
r
。
[0048]
步骤1.2,将所述双馈发电机定子三相电压u
a
,u
b
,u
c
进行同步旋转坐标变换,得到定子电压d轴分量u
sd
和定子电压q轴分量u
sq
;将所述双馈发电机定子三相电流i
a
,i
b
,i
c
进行同步旋转坐标变换,得到定子电流d轴分量i
sd
和定子电流q轴分量i
sq
;将所述双馈发电机转子三相电流i
a
,i
b
,i
c
进行同步旋转坐标变换,得到转子电流d轴分量i
rd
和转子电流q轴分量i
sq
;对所述转子角速度ω
r
进行积分运算,得到转子旋转角度θ
r
。
[0049]
具体的,所述定子电压d轴分量u
sd
和定子电压q轴分量u
sq
坐标转换公式如下:
[0050][0051]
式中,θ
′1为上一周期定子旋转角度;
[0052]
所述定子电流d轴分量i
sd
和定子电流q轴分量i
sq u
sq
坐标转换公式如下:
[0053][0054]
所述转子电流d轴分量i
rd
和转子电流q轴分量i
rq
的坐标转换公式如下:
[0055][0056]
式中,θ
′2为上一周期转差角度。
[0057]
步骤2,功率计算与滤波
[0058]
利用式(1)进行功率计算得到定子输出有功功率p
′
和定子输出无功功率q
′
:
[0059][0060]
利用式(2)得到经过低通滤波器后的有功功率p和经过低通滤波器后的无功功率q:
[0061][0062]
在式(2)中,ω
f
为低通滤波器的截至频率,s为拉普拉斯算子。
[0063]
在本实例中,ω
f
=20π。
[0064]
步骤3,虚拟同步超前滞后控制
[0065]
利用式(3)得到角频率指令ω
*
、d轴电压指令分量和q轴电压指令分量从而实现虚拟同步超前滞后控制:
[0066][0067]
在式(3)中,p
ref
为有功功率给定值,q
ref
为无功功率给定值,ω
n
为并网点的额定角频率,u
n
为并网点的额定电压,j
d
为惯性系数,d
d
为阻尼系数,k
q
为无功功率下垂系数,k
u
为无功电压调节系数,k
d
为超前环节系数,t
d
为滞后环节系数。
[0068]
利用式(4)得到超前环节系数k
d
和滞后环节系数t
d
的取值:
[0069][0070]
利用式(5)得到定子旋转角度θ1和转差角度θ2:
[0071][0072]
在本实例中,p
ref
=2000000,q
ref
=0,ω
n
=100π,u
n
=690,j
d
=2,d
d
=200,k
q
=0.00001,k
u
=10000。
[0073]
步骤4,电压和电流控制环
[0074]
利用式(6)得到转子电流指令q轴分量i
rq*
和转子电流指令d轴分量i
rd*
:
[0075][0076]
在式(6)中,k
up
为电压环pi调节器pi
v
的比例控制系数,k
ui
为电压环pi调节器pi
v
的积分控制系数。
[0077]
利用式(7)得到转子电压q轴分量u
rq
和转子电压d轴分量u
rd
:
[0078][0079]
在式(7)中,k
ip
为电流环pi调节器pi
i
的比例控制系数,k
ii
为电流环pi调节器pi
i
的积分控制系数。
[0080]
在本实例中,k
up
=0.2,k
ui
=0.05,k
ip
=0.2,k
ii
=0.05。
[0081]
步骤5,开关信号生成
[0082]
将所述转子电压d轴分量u
rd
和转子电压q轴分量u
rq
经过svpwm调制生成逆变器功率器件的开关信号s
a
,s
b
,s
c
,从而控制转子侧逆变器的功率器件的开通和关断。
[0083]
为了佐证本发明的技术效果,对本发明进行了仿真。图3为本发明抑制方法的仿真图,pref为有功功率给定值,横坐标为时间,纵坐标为有功功率标幺值。由图3可见,与未采用本发明的状态相比,采用本发明方法后,有功功率的振荡得到了有效的抑制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。